
DFU全称为Device Firmware update,是ST官方推出的一个通过USB接口进行IAP升级的方案,同串口ISP一样,他们都集成在了芯片内部的Bootloader区段,可以通过配置boot引脚来启动。(具体可参照ST文档:AN2606)。
不过内置DFU的芯片大部分型号都比较新,如果你用的型号没有内置DFU程序,没关系我们也可以通过CubeMX来快速生成和移植一个DFU功能程序到你的Flash中来使用。
DFU方案完整的组件包括单片机DFU Demo代码、PC端升级程序、PC端Demo代码以及相关资料手册等。
通过使用DFU方案,我们可以快速的集成升级功能到开发的产品中,同时还能够快速的开发与之配套的升级程序。
由于官方提供的DFU例程并不多,我们很难找到现成的可已使用DFU程序,但是通过CubeMX我们可以很快速的配置和生成DFU的Bootloader,下面我们正式开始。
新建CubeMX工程
首先选定好IC的型号,进入配置界面,由于只是Bootloader代码所以这里我们只需要配置USB功能和一个做Bootloader触发的引脚就可,其余的时钟等部分一切按照正常方式配置。
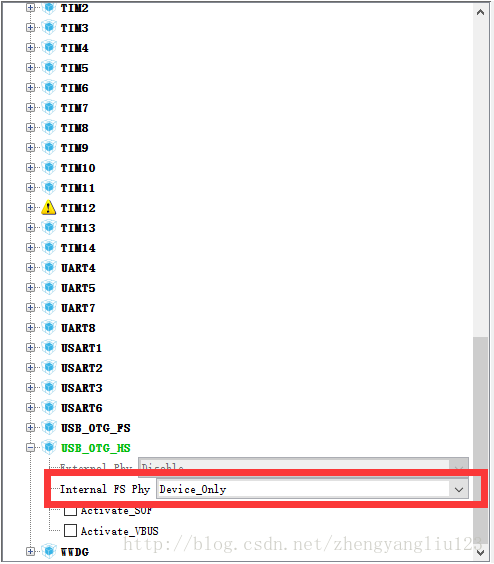
设置USB引脚功能
设定USB模式为Device(HS还是FS并不影响DFU的功能,按照应用选择就可)。
开启DFU组件
在MiddleWares中加入USB DFU组件
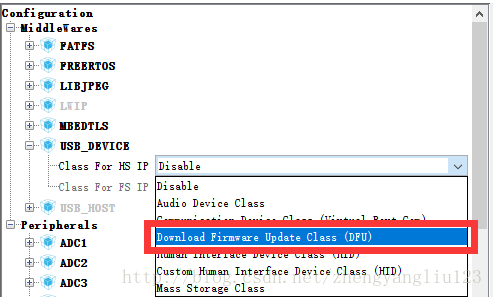
设置DFU参数
开启DFU组件后,CubeMX的程序设置窗口的MiddleWares中就会出现DFU程序设置按钮。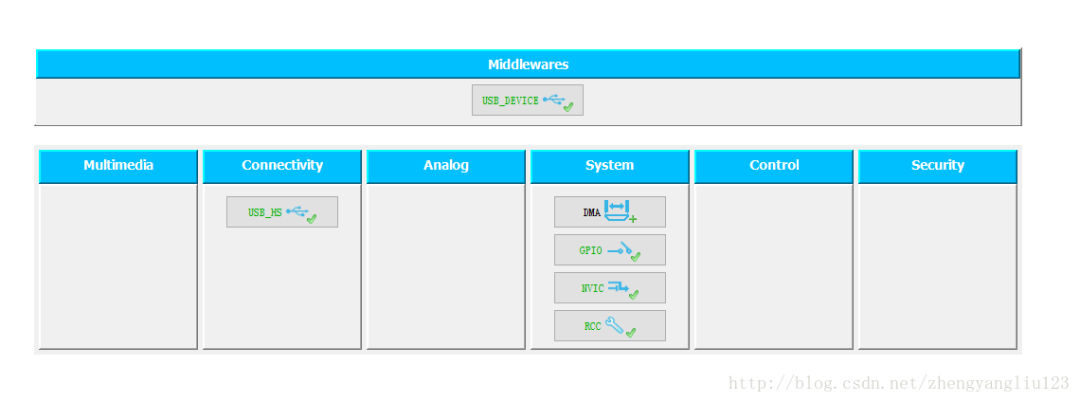
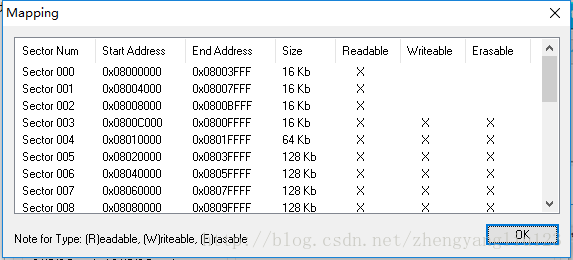
点开它将APP加载的地址改为0x0800_c000,这个加载地址根据你实际的应用设置,目前我们选择让flash的前三个sector为Bootloader的区域。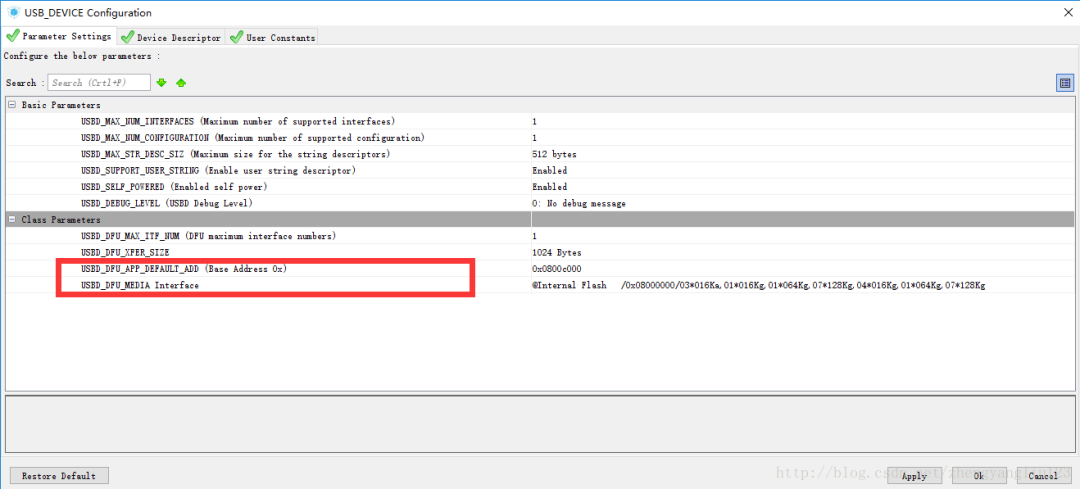
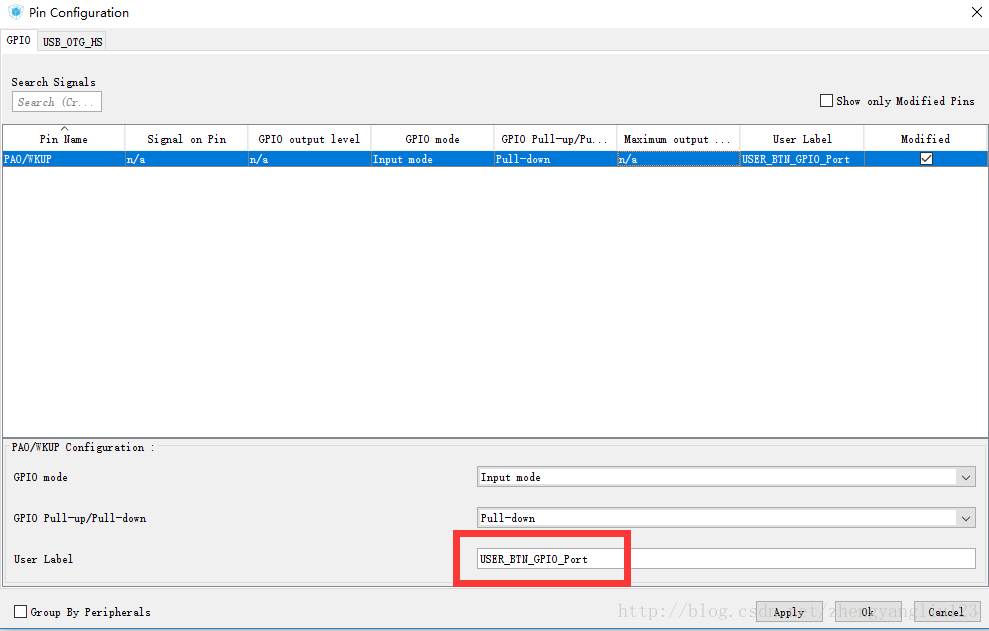
最后的设置
最后我们添加一个外部的按键作为触发单片机启动时进入DFU的方式,按键按下后就启动DFU模式,否则直接加载后方APP程序,这里选用PA0引脚,给它设置个User Label 就叫 USER_BTN_GPIO_Port。
实现 DFU 功能代码
打开 src 目录下的 usbd_dfu_if.c 文件补全其中的功能代码
Flash 解锁
uint16_t MEM_If_Init_HS(void)
{
HAL_FLASH_Unlock();
return (USBD_OK);
}
Flash 上锁
uint16_t MEM_If_DeInit_HS(void)
{
HAL_FLASH_Lock();
return (USBD_OK);
}
Flash 擦除
static uint32_t GetSector(uint32_t Address)
{
uint32_t sector = 0;
if ((Address < ADDR_FLASH_SECTOR_1) && (Address >= ADDR_FLASH_SECTOR_0))
{
sector = FLASH_SECTOR_0;
}
......
}
else if ((Address < ADDR_FLASH_SECTOR_23) && (Address >= ADDR_FLASH_SECTOR_22))
{
sector = FLASH_SECTOR_22;
}
else
{
sector = FLASH_SECTOR_23;
}
return sector;
}
uint16_t MEM_If_Erase_HS(uint32_t Add)
{
uint32_t startsector = 0;
uint32_t sectornb = 0;
/* Variable contains Flash operation status */
HAL_StatusTypeDef status;
FLASH_EraseInitTypeDef eraseinitstruct;
/* Get the number of sector */
startsector = GetSector(Add);
eraseinitstruct.TypeErase = FLASH_TYPEERASE_SECTORS;
eraseinitstruct.VoltageRange = FLASH_VOLTAGE_RANGE_3;
eraseinitstruct.Sector = startsector;
eraseinitstruct.NbSectors = 1;
status = HAL_FLASHEx_Erase(&eraseinitstruct, §ornb);
if (status != HAL_OK)
{
return (USBD_FAIL);
}
return (USBD_OK);
}
Flash 写入
uint16_t MEM_If_Write_HS(uint8_t *src, uint8_t *dest, uint32_t Len)
{
uint32_t i = 0;
for (i = 0; i < Len; i += 4)
{
/* Device voltage range supposed to be [2.7V to 3.6V], the operation will
be done by byte */
if (HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, (uint32_t)(dest + i), *(uint32_t *)(src + i)) == HAL_OK)
{
/* Check the written value */
if (*(uint32_t *)(src + i) != *(uint32_t *)(dest + i))
{
/* Flash content doesn't match SRAM content */
return (USBD_FAIL);
}
}
else
{
/* Error occurred while writing data in Flash memory */
return (USBD_FAIL);
}
}
return (USBD_OK);
}
Flash 读取
uint8_t *MEM_If_Read_HS(uint8_t *src, uint8_t *dest, uint32_t Len)
{
/* Return a valid address to avoid HardFault */
uint32_t i = 0;
uint8_t *psrc = src;
for (i = 0; i < Len; i++)
{
dest[i] = *psrc++;
}
/* Return a valid address to avoid HardFault */
return (uint8_t *)(dest);
}
获取 Flash 擦写时间参数
uint16_t MEM_If_GetStatus_HS(uint32_t Add, uint8_t Cmd, uint8_t *buffer)
{
/* USER CODE BEGIN 11 */
uint16_t time;
time = TimingTable[GetSector(Add)];
switch (Cmd)
{
case DFU_MEDIA_PROGRAM:
buffer[1] = (uint8_t)time;
buffer[2] = (uint8_t)(time << 8);
buffer[3] = 0;
break;
case DFU_MEDIA_ERASE:
default:
buffer[1] = (uint8_t)time;
buffer[2] = (uint8_t)(time << 8);
buffer[3] = 0;
break;
}
return (USBD_OK);
/* USER CODE END 11 */
}
usbd_dfu_if.h 文件添加的宏定义
/* Define flash address */
// BLANK 1
#define ADDR_FLASH_SECTOR_0 0x08000000
#define ADDR_FLASH_SECTOR_1 0x08004000
#define ADDR_FLASH_SECTOR_2 0x08008000
#define ADDR_FLASH_SECTOR_3 0x0800C000
#define ADDR_FLASH_SECTOR_4 0x08010000
#define ADDR_FLASH_SECTOR_5 0x08020000
#define ADDR_FLASH_SECTOR_6 0x08040000
#define ADDR_FLASH_SECTOR_7 0x08060000
#define ADDR_FLASH_SECTOR_8 0x08080000
#define ADDR_FLASH_SECTOR_9 0x080A0000
#define ADDR_FLASH_SECTOR_10 0x080C0000
#define ADDR_FLASH_SECTOR_11 0x080E0000
// BLANK 2
#define ADDR_FLASH_SECTOR_12 0x08100000
#define ADDR_FLASH_SECTOR_13 0x08104000
#define ADDR_FLASH_SECTOR_14 0x08108000
#define ADDR_FLASH_SECTOR_15 0x0810C000
#define ADDR_FLASH_SECTOR_16 0x08110000
#define ADDR_FLASH_SECTOR_17 0x08120000
#define ADDR_FLASH_SECTOR_18 0x08140000
#define ADDR_FLASH_SECTOR_19 0x08160000
#define ADDR_FLASH_SECTOR_20 0x08180000
#define ADDR_FLASH_SECTOR_21 0x081A0000
#define ADDR_FLASH_SECTOR_22 0x081C0000
#define ADDR_FLASH_SECTOR_23 0x081E0000
/* Flash oprate time from datasheet page 128 */
#define FLASH_SECTOR_16KB_WRITE_ERASE_TIME 500 //500 usb frame,means 500ms
#define FLASH_SECTOR_64KB_WRITE_ERASE_TIME 1100
#define FLASH_SECTOR_128KB_WRITE_ERASE_TIME 2000
修改Main文件
首先在main文件前添加几个用于加载APP程序的变量和函数定义
typedef void (*pFunction)(void);
pFunction JumpToApplication;
uint32_t JumpAddress;1234
然后再 main 函数中加入 外部按键的判断、APP程序加载以及USB DFU初始化功能
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
if (HAL_GPIO_ReadPin(USER_BTN_GPIO_Port, USER_BTN_Pin) == GPIO_PIN_SET)
{
HAL_GPIO_WritePin(GPIOG, LD3_Pin, GPIO_PIN_SET); // For debug
/* Test if user code is programmed starting from address 0x0800C000 */
if (((*(__IO uint32_t *)USBD_DFU_APP_DEFAULT_ADD) & 0x2FF80000) == 0x20000000)
{
HAL_GPIO_WritePin(GPIOG, LD4_Pin, GPIO_PIN_SET); // For debug
/* Jump to user application */
JumpAddress = *(__IO uint32_t *)(USBD_DFU_APP_DEFAULT_ADD + 4);
JumpToApplication = (pFunction)JumpAddress;
/* Reset of all peripherals */
HAL_DeInit();
/* Set interrupt vector to app code */
SCB->VTOR = USBD_DFU_APP_DEFAULT_ADD;
/* Initialize user application's Stack Pointer */
__set_MSP(*(__IO uint32_t *)USBD_DFU_APP_DEFAULT_ADD);
JumpToApplication();
}
}
MX_USB_DEVICE_Init();
while (1)
{
}
}
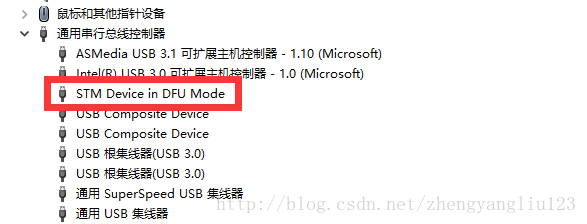
从ST官网DfuSe的程序安装包,并安装。然后我们按下之前写的触发按键并复位单片机,让单片机初始 USB DFU 功能,这时如果你插着单片机的USB线,系统应该已经识别了。
如果没有右键更新驱动程序,手动指定驱动搜索路径在DfuSe安装目录下的 \Bin\Driver 内。如果直接无法识别USB设备,建议在CubeMx配置完工程后就编译下载测试一下,看看是不是你在移植过程中哪里写错了。
然后我们需要生成一个地址设定在0x0800_c000后的测试程序,就先编写一个 Blink LED 的程序吧,生成bin、hex或S19文件。
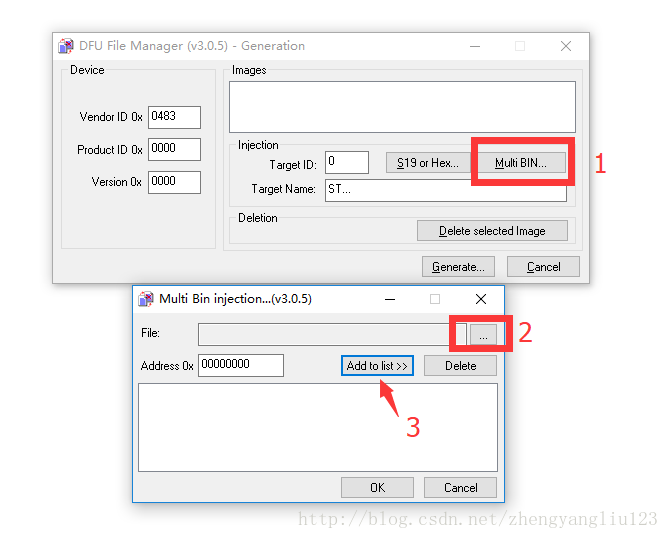
然后我们打开DfuSe软件的Dfu file manager来生成DFU软件用的.dfu格式的文件。选择第一项,第二个是用来将.dfu反向变换回来的。
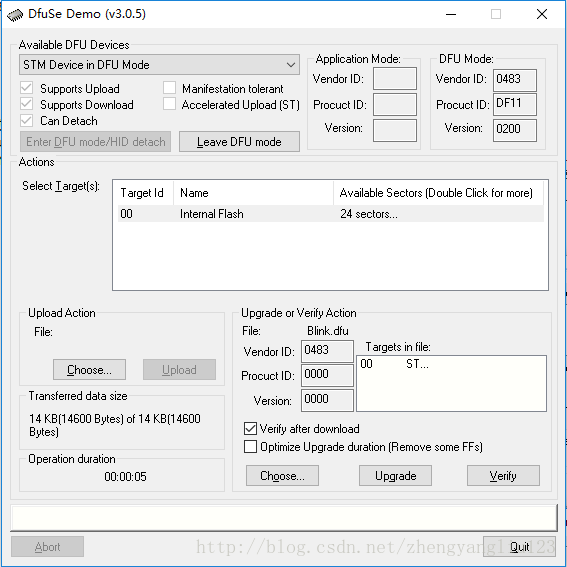
大概的操作已经标在图片上了,操作比较简单就不做详细介绍了,记得把Address的地址改到偏移后的地址上否则下载会出错,其他参数可以不用修改。
然后我们打开DfuSe程序,在Upgrade中选择生成好的blink.dfu文件,勾选校验功能,下载程序。成功后复位单片机,LED开始闪烁,移植成功。
仔细区看看DfuSe的安装目录,里面有DFU的资料文档,还有DFU的工程源代码,可以用来改写自己需要的DFU升级程序。
http://www.stmicroelectronics.com.cn/content/st_com/zh/products/development-tools/software-development-tools/stm32-software-development-tools/stm32-programmers/stsw-stm32080.html
文章来源于网络,版权归原作者所有,如有侵权,请联系删除。

关注【一起学嵌入式】,回复“加群”进技术交流群。
觉得文章不错,点击“分享”、“赞”、“在看” 呗!
