


建议每一个 Linux 驱动工程师,都能瞄一眼本文。
之所以用 “瞄”,因此它很简单,几乎不需要花费心思就能理解。
之所有这建议,是因为它非常实用,可以解答一些困惑,可以使我们的代码变得简单、简洁。先看一个例子:
1: /* drivers/media/platform/soc_camera/mx1_camera.c, line 695 */
2: static int __init mx1_camera_probe(struct platform_device *pdev)
3: {
4: ...
5:
6: res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
7: irq = platform_get_irq(pdev, 0);
8: if (!res || (int)irq <= 0) {
9: err = -ENODEV;
10: goto exit;
11: }
12:
13: clk = clk_get(&pdev->dev, "csi_clk");
14: if (IS_ERR(clk)) {
15: err = PTR_ERR(clk);
16: goto exit;
17: }
18:
19: pcdev = kzalloc(sizeof(*pcdev), GFP_KERNEL);
20: if (!pcdev) {
21: dev_err(&pdev->dev, "Could not allocate pcdev\n");
22: err = -ENOMEM;
23: goto exit_put_clk;
24: }
25:
26: ...
27:
28: /*
29: * Request the regions.
30: */
31: if (!request_mem_region(res->start, resource_size(res), DRIVER_NAME)) {
32: err = -EBUSY;
33: goto exit_kfree;
34: }
35:
36: base = ioremap(res->start, resource_size(res));
37: if (!base) {
38: err = -ENOMEM;
39: goto exit_release;
40: }
41: ...
42:
43: /* request dma */
44: pcdev->dma_chan = imx_dma_request_by_prio(DRIVER_NAME, DMA_PRIO_HIGH);
45: if (pcdev->dma_chan < 0) {
46: dev_err(&pdev->dev, "Can't request DMA for MX1 CSI\n");
47: err = -EBUSY;
48: goto exit_iounmap;
49: }
50: ...
51:
52: /* request irq */
53: err = claim_fiq(&fh);
54: if (err) {
55: dev_err(&pdev->dev, "Camera interrupt register failed\n");
56: goto exit_free_dma;
57: }
58:
59: ...
60: err = soc_camera_host_register(&pcdev->soc_host);
61: if (err)
62: goto exit_free_irq;
63:
64: dev_info(&pdev->dev, "MX1 Camera driver loaded\n");
65:
66: return 0;
67:
68: exit_free_irq:
69: disable_fiq(irq);
70: mxc_set_irq_fiq(irq, 0);
71: release_fiq(&fh);
72: exit_free_dma:
73: imx_dma_free(pcdev->dma_chan);
74: exit_iounmap:
75: iounmap(base);
76: exit_release:
77: release_mem_region(res->start, resource_size(res));
78: exit_kfree:
79: kfree(pcdev);
80: exit_put_clk:
81: clk_put(clk);
82: exit:
83: return err;
84: }相信每一个写过 Linux driver 的工程师,都在 probe 函数中遇到过上面的困惑:要顺序申请多种资源(IRQ、Clock、memory、regions、ioremap、dma、等等),只要任意一种资源申请失败,就要回滚释放之前申请的所有资源。
于是函数的最后,一定会出现很多的 goto 标签(如上面的 exit_free_irq、exit_free_dma、等等),并在申请资源出错时,小心翼翼的 goto 到正确的标签上,以便释放已申请资源。
正像上面代码一样,整个函数被大段的、重复的 “if (condition) { err = xxx; goto xxx; }” 充斥,浪费精力,容易出错,不美观。有困惑,就有改善的余地,最终,Linux 设备模型借助 device resource management(设备资源管理),帮我们解决了这个问题。
就是:driver 你只管申请就行了,不用考虑释放,我设备模型帮你释放。最终,我们的 driver 可以这样写:
1: static int __init mx1_camera_probe(struct platform_device *pdev)
2: {
3: ...
4:
5: res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
6: irq = platform_get_irq(pdev, 0);
7: if (!res || (int)irq <= 0) {
8: return -ENODEV;
9: }
10:
11: clk = devm_clk_get(&pdev->dev, "csi_clk");
12: if (IS_ERR(clk)) {
13: return PTR_ERR(clk);
14: }
15:
16: pcdev = devm_kzalloc(&pdev->dev, sizeof(*pcdev), GFP_KERNEL);
17: if (!pcdev) {
18: dev_err(&pdev->dev, "Could not allocate pcdev\n");
19: return -ENOMEM;
20: }
21:
22: ...
23:
24: /*
25: * Request the regions.
26: */
27: if (!devm_request_mem_region(&pdev->dev, res->start, resource_size(res), DRIVER_NAME)) {
28: return -EBUSY;
29: }
30:
31: base = devm_ioremap(&pdev->dev, res->start, resource_size(res));
32: if (!base) {
33: return -ENOMEM;
34: }
35: ...
36:
37: /* request dma */
38: pcdev->dma_chan = imx_dma_request_by_prio(DRIVER_NAME, DMA_PRIO_HIGH);
39: if (pcdev->dma_chan < 0) {
40: dev_err(&pdev->dev, "Can't request DMA for MX1 CSI\n");
41: return -EBUSY;
42: }
43: ...
44:
45: /* request irq */
46: err = claim_fiq(&fh);
47: if (err) {
48: dev_err(&pdev->dev, "Camera interrupt register failed\n");
49: return err;
50: }
51:
52: ...
53: err = soc_camera_host_register(&pcdev->soc_host);
54: if (err)
55: return err;
56:
57: dev_info(&pdev->dev, "MX1 Camera driver loaded\n");
58:
59: return 0;
60: }怎么做到呢?注意上面 “devm_” 开头的接口,答案就在那里。
不要再使用那些常规的资源申请接口,用 devm_xxx 的接口代替。为了保持兼容,这些新接口和旧接口的参数保持一致,只是名字前加了“devm_”,并多加一个 struct device 指针。
下面列举一些常用的资源申请接口,它们由各个 framework(如 clock、regulator、gpio、等等)基于 device resource management 实现。
使用时,直接忽略 “devm_” 的前缀,后面剩下的部分,driver 工程师都很熟悉。只需记住一点,driver 可以只申请,不释放,设备模型会帮忙释放。
不过如果为了严谨,在 driver remove 时,可以主动释放(也有相应的接口,这里没有列出)。
1: extern void *devm_kzalloc(struct device *dev, size_t size, gfp_t gfp);
2:
3: void __iomem *devm_ioremap_resource(struct device *dev,
4: struct resource *res);
5: void __iomem *devm_ioremap(struct device *dev, resource_size_t offset,
6: unsigned long size);
7:
8: struct clk *devm_clk_get(struct device *dev, const char *id);
9:
10: int devm_gpio_request(struct device *dev, unsigned gpio,
11: const char *label);
12:
13: static inline struct pinctrl * devm_pinctrl_get_select(
14: struct device *dev, const char *name)
15:
16: static inline struct pwm_device *devm_pwm_get(struct device *dev,
17: const char *consumer);
18:
19: struct regulator *devm_regulator_get(struct device *dev, const char *id);
20:
21: static inline int devm_request_irq(struct device *dev, unsigned int irq,
22: irq_handler_t handler, unsigned long irqflags,
23: const char *devname, void *dev_id);
24:
25: struct reset_control *devm_reset_control_get(struct device *dev,
26: const char *id);一个设备能工作,需要依赖很多的外部条件,如供电、时钟等等,这些外部条件称作设备资源(device resouce)。对于现代计算机的体系结构,可能的资源包括:
a)power,供电。
b)clock,时钟。
c)memory,内存,在kernel中一般使用kzalloc分配。
d)GPIO,用户和CPU交换简单控制、状态等信息。
e)IRQ,触发中断。
f)DMA,无CPU参与情况下进行数据传输。
g)虚拟地址空间,一般使用ioremap、request_region等分配。
h)等等而在 Linux kernel 的眼中,“资源” 的定义更为广义,比如 PWM、RTC、Reset,都可以抽象为资源,供 driver 使用。
在较早的 kernel 中,系统还不是特别复杂,且各个 framework 还没有成型,因此大多的资源都由 driver 自行维护。但随着系统复杂度的增加,driver 之间共用资源的情况越来越多,同时电源管理的需求也越来越迫切。于是 kernel 就将各个 resource 的管理权收回,基于 “device resource management” 的框架,由各个 framework 统一管理,包括分配和回收。
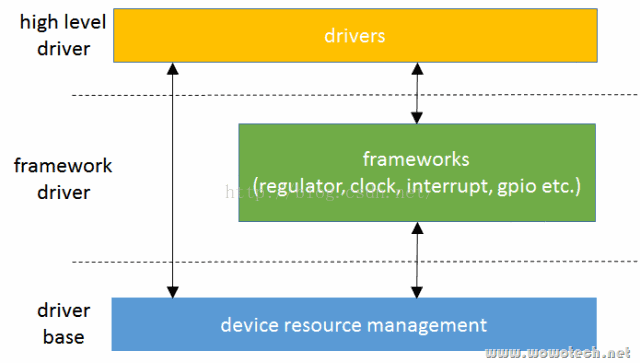
device resource management 位于 “drivers/base/devres.c” 中,它的实现非常简单,为什么呢?因为资源的种类有很多,表现形式也多种多样,而 devres 不可能一一知情,也就不能进行具体的分配和回收。因此,devres 能做的(也是它的唯一功能),就是:
提供一种机制,将系统中某个设备的所有资源,以链表的形式,组织起来,以便在 driver detach 的时候,自动释放。
而更为具体的事情,如怎么抽象某一种设备,则由上层的 framework 负责。
这些 framework 包括:regulator framework(管理 power 资源),clock framework(管理 clock 资源),interrupt framework(管理中断资源)、gpio framework(管理 gpio 资源),pwm framework(管理 PWM),等等。
其它的 driver,位于这些 framework 之上,使用它们提供的机制和接口,开发起来就非常方便了。
先从 struct device 开始吧!该结构中有一个名称为 “devres_head” 的链表头,用于保存该设备申请的所有资源,如下:
1: struct device {
2: ...
3: spinlock_t devres_lock;
4: struct list_head devres_head;
5: ...
6: }那资源的数据结构呢?在 “drivers/base/devres.c” 中,名称为 struct devres,如下:
1: struct devres {
2: struct devres_node node;
3: /* -- 3 pointers */
4: unsigned long long data[]; /* guarantee ull alignment */
5: };咋一看非常简单,一个 struct devres_node 的变量 node,一个零长度数组 data,但其中有无穷奥妙,让我们继续分析。
node 用于将 devres 组织起来,方便插入到 device 结构的 devres_head 链表中,因此一定也有一个 list_head(见下面的 entry)。
另外,资源的存在形式到底是什么,device resource management 并不知情,因此需要上层模块提供一个 release 的回调函数,用于 release 资源,如下:
1: struct devres_node {
2: struct list_head entry;
3: dr_release_t release;
4: #ifdef CONFIG_DEBUG_DEVRES
5: const char *name;
6: size_t size;
7: #endif
8: };抛开用于 debug 的变量不说,也很简单,一个 entry list_head,一个 release 回调函数。看不出怎么抽象资源啊!别急,奥妙都在 data 这个零长度数组上面呢。
注 1:不知道您是否注意到,devres 有关的数据结构,是在 devres.c 中定义的(是 C 文件哦!)。换句话说,是对其它模块透明的。这真是优雅的设计(尽量屏蔽细节)!
零长度数组的英文原名为 Arrays of Length Zero,是 GNU C 的规范,主要用途是用来作为结构体的最后一个成员,然后用它来访问此结构体对象之后的一段内存(通常是动态分配的内存)。什么意思呢?
以 struct devres 为例,node 变量的长度为 3 个指针的长度,而 struct devres 的长度也是 3 个指针的长度。而 data 只是一个标记,当有人分配了大于 3 个指针长度的空间并把它转换为 struct devres 类型的变量后,我们就可以通过 data 来访问多出来的 memory。
也就是说,有了零长度数组 data,struct devres 结构的长度可以不定,完全依赖于你分配的空间的大小。有什么用呢?
以本文的应用场景为例,多出来的、可通过 data 访问的空间,正是具体的 device resource 所占的空间。
资源的类型不同,占用的空间的多少也不同,但 devres 模块的主要功能又是释放资源所占的资源。
这是就是零长度数组的功能之一,因为整个 memory 空间是连续的,因此可以通过释 devres 指针,释放所有的空间,包括 data 所指的那片不定长度的、具体资源所用的空间。
零长度数组(data[0]),在不同的 C 版本中,有不同的实现方案,包括 1 长度数组(data[1])和不定长度数组(data[],本文所描述就是这一种),具体可参考 GCC 的规范:
https://gcc.gnu.org/onlinedocs/gcc/Zero-Length.html
先看一个使用 device resource management 的例子(IRQ 模块):
1: /* include/linux/interrupt.h */
2: static inline int __must_check
3: devm_request_irq(struct device *dev, unsigned int irq, irq_handler_t handler,
4: unsigned long irqflags, const char *devname, void *dev_id)
5: {
6: return devm_request_threaded_irq(dev, irq, handler, NULL, irqflags,
7: devname, dev_id);
8: }
9:
10:
11: /* kernel/irq/devres.c */
12: int devm_request_threaded_irq(struct device *dev, unsigned int irq,
13: irq_handler_t handler, irq_handler_t thread_fn,
14: unsigned long irqflags, const char *devname,
15: void *dev_id)
16: {
17: struct irq_devres *dr;
18: int rc;
19:
20: dr = devres_alloc(devm_irq_release, sizeof(struct irq_devres),
21: GFP_KERNEL);
22: if (!dr)
23: return -ENOMEM;
24:
25: rc = request_threaded_irq(irq, handler, thread_fn, irqflags, devname,
26: dev_id);
27: if (rc) {
28: devres_free(dr);
29: return rc;
30: }
31:
32: dr->irq = irq;
33: dr->dev_id = dev_id;
34: devres_add(dev, dr);
35:
36: return 0;
37: }
38: EXPORT_SYMBOL(devm_request_threaded_irq);
39:
40: void devm_free_irq(struct device *dev, unsigned int irq, void *dev_id)
41: {
42: struct irq_devres match_data = { irq, dev_id };
43:
44: WARN_ON(devres_destroy(dev, devm_irq_release, devm_irq_match,
45: &match_data));
46: free_irq(irq, dev_id);
47: }
48: EXPORT_SYMBOL(devm_free_irq);前面我们提过,上层的 IRQ framework,会提供两个和 request_irq/free_irq 基本兼容的接口,这两个接口的实现非常简单,就是在原有的实现之上,封装一层 devres 的操作,如要包括:
1)一个自定义的数据结构(struct irq_devres),用于保存和 resource 有关的信息(对中断来说,就是 IRQ num),如下:
1: /*
2: * Device resource management aware IRQ request/free implementation.
3: */
4: struct irq_devres {
5: unsigned int irq;
6: void *dev_id;
7: };2)一个用于 release resource 的回调函数(这里的 release,和 memory 无关,例如 free IRQ),如下:
1: static void devm_irq_release(struct device *dev, void *res)
2: {
3: struct irq_devres *this = res;
4:
5: free_irq(this->irq, this->dev_id);
6: }因为回调函数是由 devres 模块调用的,由它的参数可知,struct irq_devres 变量就是实际的 “资源”,但对 devres 而言,它并不知道该资源的实际形态,因而是 void 类型指针。也只有这样,devres 模块才可以统一的处理所有类型的资源。
3)以回调函数、resource 的 size 为参数,调用 devres_alloc 接口,为 resource 分配空间。该接口的定义如下:
1: void * devres_alloc(dr_release_t release, size_t size, gfp_t gfp)
2: {
3: struct devres *dr;
4:
5: dr = alloc_dr(release, size, gfp);
6: if (unlikely(!dr))
7: return NULL;
8: return dr->data;
9: }调用 alloc_dr,分配一个 struct devres 类型的变量,并返回其中的 data 指针(5.2 小节讲过了,data 变量实际上是资源的代表)。alloc_dr 的定义如下:
1: static __always_inline struct devres * alloc_dr(dr_release_t release,
2: size_t size, gfp_t gfp)
3: {
4: size_t tot_size = sizeof(struct devres) + size;
5: struct devres *dr;
6:
7: dr = kmalloc_track_caller(tot_size, gfp);
8: if (unlikely(!dr))
9: return NULL;
10:
11: memset(dr, 0, tot_size);
12: INIT_LIST_HEAD(&dr->node.entry);
13: dr->node.release = release;
14: return dr;
15: }看第一句就可以了,在资源 size 之前,加一个 struct devres 的 size,就是 total 分配的空间。除去 struct devres 的,就是资源的(由 data 指针访问)。之后是初始化 struct devres 变量的 node。
4)调用原来的中断注册接口(这里是 request_threaded_irq),注册中断。该步骤和 device resource management 无关。
5)注册成功后,以设备指针(dev)和资源指针(dr)为参数,调用 devres_add,将资源添加到设备的资源链表头(devres_head)中,该接口定义如下:
1: void devres_add(struct device *dev, void *res)
2: {
3: struct devres *dr = container_of(res, struct devres, data);
4: unsigned long flags;
5:
6: spin_lock_irqsave(&dev->devres_lock, flags);
7: add_dr(dev, &dr->node);
8: spin_unlock_irqrestore(&dev->devres_lock, flags);
9: }从资源指针中,取出完整的 struct devres 指针,调用 add_dr 接口。add_dr 也很简单,把 struct devres 指针挂到设备的 devres_head 中即可:
1: static void add_dr(struct device *dev, struct devres_node *node)
2: {
3: devres_log(dev, node, "ADD");
4: BUG_ON(!list_empty(&node->entry));
5: list_add_tail(&node->entry, &dev->devres_head);
6: }6)如果失败,可以通过 devres_free 接口释放资源占用的空间,devm_free_irq 接口中,会调用 devres_destroy 接口,将 devres 从 devres_head 中移除,并释放资源。这里就不详细描述了。
这里是重点,用于自动释放资源。
先回忆一下设备模型中 probe 的流程(可参考 “Linux 设备模型 (5)_device 和 device driver”),devres_release_all 接口被调用的时机有两个:
1)probe 失败时,调用过程为(就不详细的贴代码了):
__driver_attach/__device_attach-->driver_probe_device—>really_probe,really_probe 调用 driver 或者 bus 的 probe 接口,如果失败(返回值非零,可参考本文开头的例子),则会调用 devres_release_all。
2)deriver dettach 时(就是 driver remove 时)
driver_detach/bus_remove_device-->__device_release_driver-->devres_release_all
devres_release_all 的实现如下:
1: int devres_release_all(struct device *dev)
2: {
3: unsigned long flags;
4:
5: /* Looks like an uninitialized device structure */
6: if (WARN_ON(dev->devres_head.next == NULL))
7: return -ENODEV;
8: spin_lock_irqsave(&dev->devres_lock, flags);
9: return release_nodes(dev, dev->devres_head.next, &dev->devres_head,
10: flags);
11: }以设备指针为参数,直接调用 release_nodes:
1: static int release_nodes(struct device *dev, struct list_head *first,
2: struct list_head *end, unsigned long flags)
3: __releases(&dev->devres_lock)
4: {
5: LIST_HEAD(todo);
6: int cnt;
7: struct devres *dr, *tmp;
8:
9: cnt = remove_nodes(dev, first, end, &todo);
10:
11: spin_unlock_irqrestore(&dev->devres_lock, flags);
12:
13: /* Release. Note that both devres and devres_group are
14: * handled as devres in the following loop. This is safe.
15: */
16: list_for_each_entry_safe_reverse(dr, tmp, &todo, node.entry) {
17: devres_log(dev, &dr->node, "REL");
18: dr->node.release(dev, dr->data);
19: kfree(dr);
20: }
21:
22: return cnt;
23: }release_nodes 会先调用 remove_nodes,将设备所有的 struct devres 指针从设备的 devres_head 中移除。
然后,调用所有资源的 release 回调函数(如 5.3 小节描述的 devm_irq_release),回调函数会回收具体的资源(如 free_irq)。
最后,调用 free,释放 devres 以及资源所占的空间。
文章来源于网络,版权归原作者所有,如有侵权,请联系删除。


觉得文章不错,点击“分享”、“赞”、“在看” 呗
