

“BEV感知+数据闭环”已经成为新一代自动驾驶系统的核心架构。
进入2023年,小鹏、理想、阿维塔、智己、华为问界等汽车品牌正在全力推动从高速NOA到城区NOA的升级。在这一过程当中,如何利用高效的算力支撑、完善的算法模型、大量有效的数据形成闭环,已经成为了城市NOA大规模量产的关键。
因此,包括主机厂、Tier1、数据平台企业等自动驾驶产业链上下游各玩家都将目光投向了自动驾驶数据闭环的打造。但由于数据闭环在量产车上实现面临着诸多的难题和痛点,目前国内较少企业可以提供一体化打通量产车数据闭环整条链路的产品或者平台。
觉非科技是国内少数可以提供完整量产车数据闭环解决方案的供应商之一。近日,觉非科技宣布,旗下“轻地图与数据闭环服务”已经拿下多家头部主机厂的定点,预计在2024年进行量产交付。

那么,觉非科技为什么能够率先拿下主机厂的定点?在量产车数据闭环的打造上面,觉非科技具备怎么样的核心竞争优势?

众所周知,高阶智能驾驶的落地,尤其是要实现从L2向L3甚至是L4跃升,最大阻碍就是面临的Corner Case较多。要解决这些“长尾问题”需要建立数据闭环体系,收集足够多且高质量的场景数据,进行训练和优化算法模型,从而驱动算法不断成熟。
觉非科技联合创始人与技术合伙人刘斌表示,数据闭环是实现高阶智能驾驶量产落地的前提,也是决定自动驾驶下半场胜负的关键。“智能驾驶功能迭代的本质是算法模型的不断优化,而算法的快速优化需要经过大量高质量的数据‘喂养’。”
但是,如何低成本、高效率地获取高质量的海量数据,却是自动驾驶数据闭环构建的一大痛点和难题。
资料显示,一个完整的自动驾驶数据闭环包括数据采集、数据回传、数据标注、模型训练和仿真测试等环节,每个环节都涉及海量数据。由于各个模块的自动化程度不高,导致AI从业者在如何快速、高效、低成本处理并挖掘海量数据,还面临着诸多的痛点和难题。
比如在数据标注环节,过去大多数公司主要依靠人工对采集回来的数据做场景分类,不仅效率较低,还会产生误差,从而影响结果。
与此同时,量产车产生的海量数据具备数据量庞大、数据格式复杂、数据包上传传输不稳定、数据上传大小不一致等特征,需要在车端装配实时处理数据的软件,将非结构化数据(图像、点云等)转化为结构化数据(树木、行人、GPS坐标等信息),以确保数据的质量以及可用性,这不仅对于数据厂商有着极高的算法能力要求,还需要数据厂商具备大量Know-How及实践策略。
而在数据采集阶段。目前国家对于数据安全的管理趋严,企业在采集感知算法迭代所需的道路数据时,需要具备相应的测绘资质。截止2023年7月,仅有19家单位拥有导航电子地图制作甲级测绘资质。
基于以上的种种难题和挑战,目前为止,行业内还较少能够基于量产车提供一体化打通数据闭环整条链路的产品或者平台。
“数据闭环的每个环节都有诸多的工程化细节需要处理,流程极其复杂,且最终会影响整体的运行效率。”刘斌表示,数据闭环的构建,不仅需要了解框架的工作原理,还需要优异的工程实践能力。

基于数据闭环的BEV+ Transformer算法量产架构,已经成为了当前城市NOA解决方案的主流。刘斌表示,Transformer算法特性对数据的质量有较高的要求,需要设计多种渠道的数据采集闭环通道。除了动态目标感知数据闭环之外,还需要配合基于环境感知数据闭环的运用。
资料显示,自动驾驶数据闭环大致可以分为动态目标数据闭环和环境感知数据闭环。其中,动态目标数据闭环主要指的是车端实时感知数据闭环,而环境感知数据闭环又称为轻地图数据闭环,主要指的是复用车端的BEV感知数据,然后在云端实现整个地图的自动化构建与更新,即“环境重建”。
“单车BEV实时感知范围较小,且许多特殊场景出现频率低等因素影响,很难实现所有驾驶场景数据的全覆盖。”刘斌表示,高精地图具备超视距等能力,在复杂路口、恶劣天气等复杂与极端场景下,地图与车端BEV感知数据闭环进行有效互补,才能提升高阶智能驾驶的安全性和驾驶体验。
因此,自动驾驶算法的迭代升级依赖于大规模高质量数据的投喂,尤其是在感知端引入AI大模型“BEV+ Transformer”后,道路数据的重要性愈发凸显。
目前,觉非科技已经构建了适用于全场景智能驾驶数据闭环能力的量产方案。比如今年4月,觉非科技就发布了“基于BEV的数据闭环融合智能驾驶方案”,通过量产车BEV的实时感知结果的复用,提供完整的城市Map-Lite及Map-Free数据闭环融合解决方案。
继针对城市NOA方案推出后,11月14日,觉非科技又再次推出了面向高速场景的“轻地图高速NOA智驾方案”,方案携手地平线与MobileDrive超捷,三方联合首次实现了从芯片能力输出、到数据闭环建设、再到规控部署的产业生态链协作与打通,为低成本高速NOA方案的落地与量产提供了技术保障,同时也为产业带来了更加可靠且具竞争力的选择。
那么,觉非科技能够率先打通量产车数据闭环的整条链路?《高工智能汽车》认为,如何真正高效率、低成本地实现量产车数据闭环的打造,需要自动驾驶数据厂商具备大规模的优质数据以及丰富的Know-how工程化实践经验,而这恰恰是觉非科技的几大核心竞争优势:
其一,觉非科技已经与具备甲级电子导航地图资质的企业建立了深度战略合作,从而具备了数据合规采集等能力,可以以安全、合规、高效的方式面向主机厂提供数据服务。
其二,觉非科技已经积累了覆盖不同场景的自动驾驶数据集,并转化成了数据服务平台。觉非科技是国内领先的自动驾驶感知决策算法与数据服务商,也是国内少数在城市智能驾驶、高速智能驾驶、封闭园区智能驾驶三大应用场景都有量产落地的厂商,积累了大量涵盖车端与路侧的技术实践与数据集,以及丰富的自动驾驶数据处理经验和工程化Know-How。
其三,觉非科技搭建了全流程高度自动化的数据实时处理平台及工具链服务,可以实现自动化标注、自动化脱敏等。
最后,也是最为核心的关键优势是觉非科技拥有快速、低成本的SLAM建图能力。据了解,觉非科技通过实时BEV感知结果的复用,可以在云端实现SLAM自动化建图。
过去,高精地图一直被认为是高阶智能驾驶的“标配”,除了特斯拉之外,不少主机厂都基于高精地图打造高速NOA。不过,虽然高精地图可以提供丰富的道路元素信息,但高精地图一直面临着制图成本高、覆盖率低、更新慢等多重痛点,难以很好地满足智能驾驶的快速大规模上车需求。
因此,“重感知、轻地图”成为了高阶智能驾驶量产落地的主流方案。刘斌表示,所谓“重感知、轻地图”本质上并不是完全不用地图,而是需要通过实时采集数据更新生成的地图。
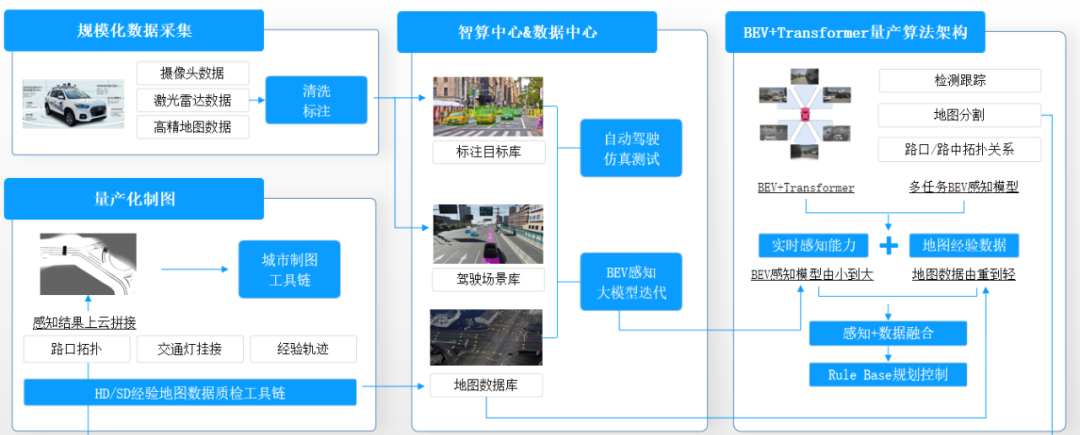
图:觉非科技基于数据闭环的BEV + Transformer算法量产架构
刘斌介绍,觉非科技利用离线高精地图生成静态要素真值数据,用于训练基于BEV的静态要素感知模型。而后将模型部署于车端,实时推理时产生静态要素的栅格图结果并上传云端,在云端对栅格图进行SLAM拼接以及矢量化等后处理,通过量产化制图能力产生大规模的高精度地图数据库,进而实现静态要素的数据闭环。
另外,值得一提的是,觉非科技在基于量产车形成数据闭环能力的同时,通过感知大模型在车端部署以及高度自动化的数据处理能力,还可以为主机厂提供轻地图服务。
总体来看,觉非科技将量产车数据与数据闭环能力进行结合,通过深度学习算法、SLAM语义建图、GIS处理技术的运用,可覆盖高快道路、城市道路及停车场等多种典型场景,从而达到以最低成本、最高效的方式解决地图数据时效和覆盖的问题,完成城市自动驾驶落地的最后一块拼图。


