

 硬件方案--主板及驱动电路
硬件方案--主板及驱动电路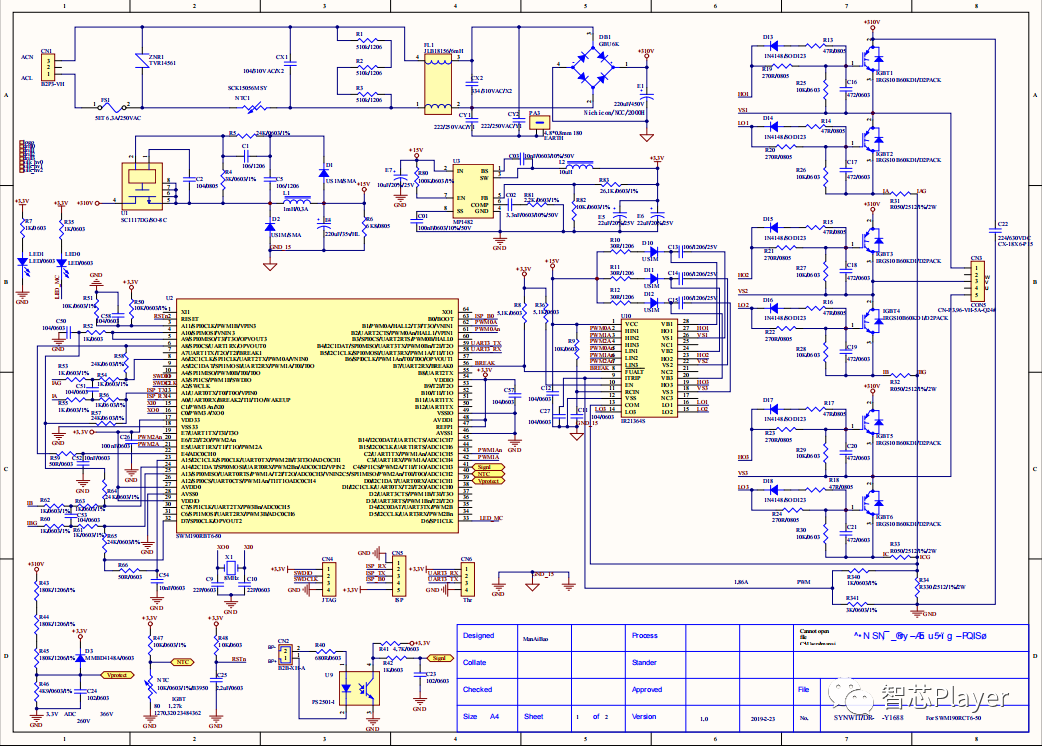
| 类型 | 型号 | 封装 | 数量 |
| 电阻 | 10R | 0603*4 | 1 |
| 100R | 0805 | 1 | |
| 1K | 0603*4 | 7 | |
| 1K | 0805 | 3 | |
| 5.1K | 0805 | 13 | |
| 1M | 0805 | 1 | |
| 电容 | 12P | 0805 | 2 |
| 22P | 0805 | 2 | |
| 4.7UF | 1206 | 2 | |
| 16V1000UF | 电解 | 1 | |
| LED | LED绿色 | 0805 | 25 |
| LED红色 | 0805 | 1 | |
| LED黄色 | 0805 | 1 | |
| 二极管 | 1N4148 | 玻璃管 | 2 |
| 1N5822 | 贴片 | 1 | |
| 晶振 | 32.768K | 2*6 | 1 |
| 8.000MHz | 49SMD | 1 | |
| 芯片 | 1117-3.3 | SOT223 | 1 |
IR21364S | SOP-28 | 1 | |
SWM190RBT6-50 | LQFP64 | 1 | |
| 其它 | 5.1K电位器 | 3362P | 2 |
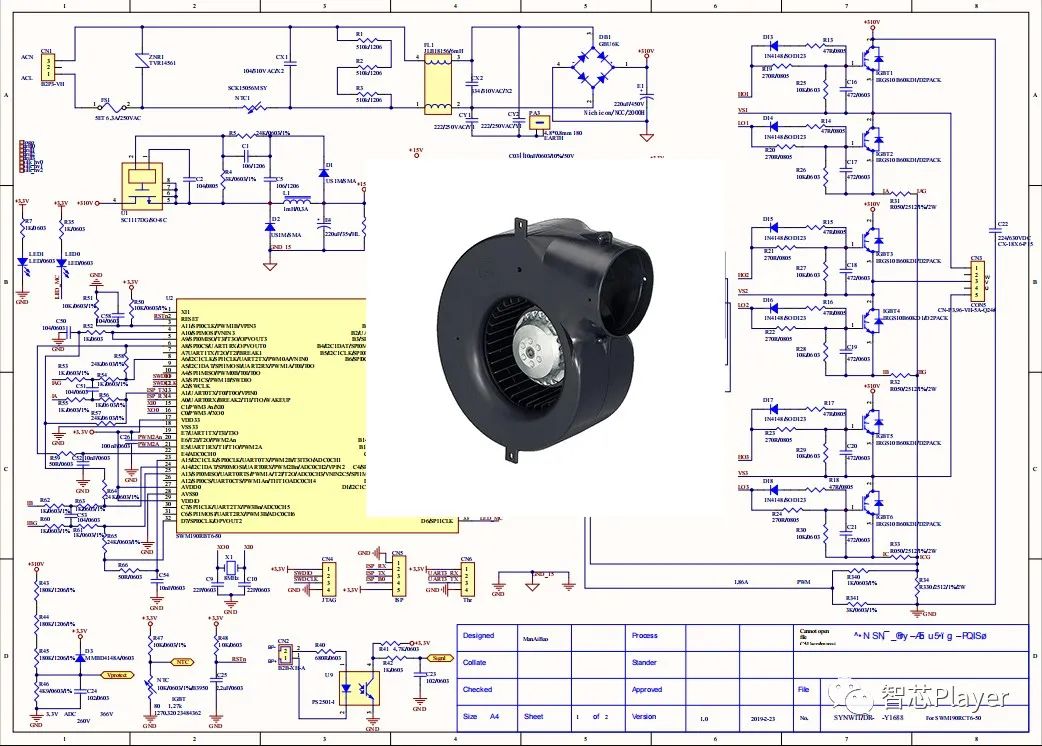
控制器采用的是一颗国产M0芯片-SWM190RBT6-50,封装是LQFP64。电路包含AC转DC电路,直流电机是高压310V,然后通过SC1117DG转成低压15V,再由MP1482变成3.3V。电机的栅极驱动芯片是IR21364S来控制WVU三路之间的通断,上下臂是通过IGBT,RGS10B60KD1/D2PACK来开关。除此之外还包含一些光耦,LED的常用的电子元器件。
本方案缺失PCB源文件,但是不影响配套程序的相关阅读及学习,本方案的主要用于学习观测器,锁相环,PID算法,SVPWM无感FOC算法以及五段式与七段式调制。
软件方案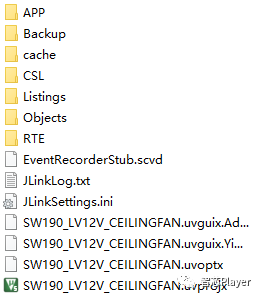
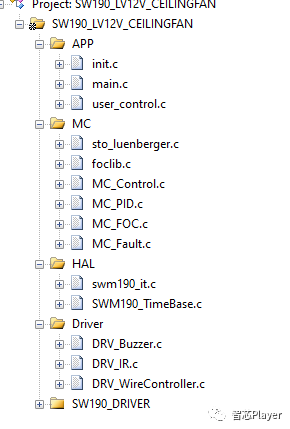

软件方案包含了工程文件,无需自己再搭建工程。用的IDE是MDK,小编给大家编译了一下,没有错误可以直接运行。包含龙伯格电机观测器,无感FOC算法,PID调节代码,整套报错信息,顺逆风启动算法,虽然是基于国产M0的代码,但是代码本身耦合性做的很好,完全可以移植到别的MCU平台上面去,同时也是非常适合对电机算法感兴趣的小伙伴认真阅读一番。以下贴一段龙伯格观测器的代码出来:
/******************************************************************************** Function Name : Speed_PI* Description : It implements the PLL PI regulator.* Input : (B-emf alpha)*sin(theta),(B-emf beta)*cos(theta).* Output : None.* Return : Motor speed (dpp, digit-per-pwm).*******************************************************************************/s16 Speed_PI(s16 hAlfa_Sin, s16 hBeta_Cos){s32 wSpeed_PI_error, wOutput;s32 wSpeed_PI_proportional_term, wSpeed_PI_integral_term;wSpeed_PI_error = hBeta_Cos - hAlfa_Sin;#if 1 //????if(wSpeed_PI_error > 50)wSpeed_PI_error = 50;else if(wSpeed_PI_error < -50)wSpeed_PI_error = -50;#endifwSpeed_PI_proportional_term = hSpeed_P_Gain * wSpeed_PI_error; // !!!pwSpeed_PI_integral_term = hSpeed_I_Gain * wSpeed_PI_error; // !!!iif ( (wSpeed_PI_integral_sum >= 0) && (wSpeed_PI_integral_term >= 0) && (Max_Speed_Out == FALSE) ){if ((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) < 0){wSpeed_PI_integral_sum = S32_MAX;}else{wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral}}else if ( (wSpeed_PI_integral_sum <= 0) && (wSpeed_PI_integral_term <= 0) && (Min_Speed_Out == FALSE) ){if((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) > 0){wSpeed_PI_integral_sum = -S32_MAX;}else{wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral}}else{wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral}wOutput = (wSpeed_PI_proportional_term >> 14) + (wSpeed_PI_integral_sum >> 18);if (wOutput > wMotorMaxSpeed_dpp){Max_Speed_Out = TRUE;wOutput = wMotorMaxSpeed_dpp;}else if (wOutput < (-wMotorMaxSpeed_dpp)){Min_Speed_Out = TRUE;wOutput = -wMotorMaxSpeed_dpp;}else{Max_Speed_Out = FALSE;Min_Speed_Out = FALSE;}return ((s16)wOutput);}




 AD封装合集
AD封装合集 EMC知识合集PADS封装合集不用开发板学习STM32合集必看必读系列经典PPT合集电子元器件基础及选型合集趣味试用系列PCB知识库合集
EMC知识合集PADS封装合集不用开发板学习STM32合集必看必读系列经典PPT合集电子元器件基础及选型合集趣味试用系列PCB知识库合集 点在看,鼓励一下小编!
点在看,鼓励一下小编!