
智能汽车安全新媒体

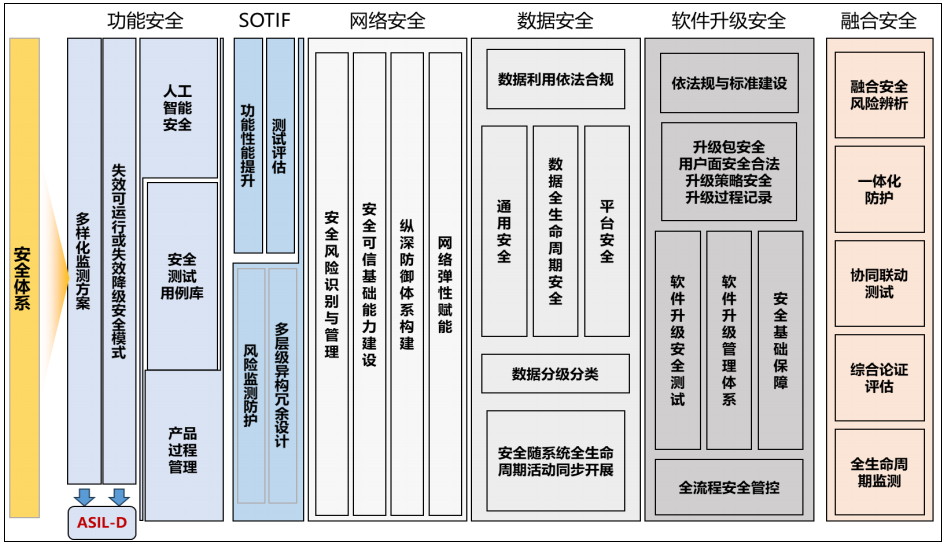
安全体系构成
一、功能安全
车载智能计算基础平台需要根据 GB/T 34590 相关标准规范,降低随机性失效或系统性失效带来的风险。加强功能安全,可以从监测方案、安全模式、安全测试用例库、产品过程管理、人工智能安全等五方面考虑。
1.1 多样化监测方案
车载智能计算基础平台可采用多样化监测方案,对于重要输入数据采用循环冗余校验(CRC)、范围校验等多重校验方式,验证输入数据的正确性、有效性;对于重要输出数据采用多种计算方式,设置安全机制,优先使用安全保障程度更高的数据或通过仲裁等方式判断最终输出;对于重要模块或单元采用程序流监控等方式监控其运行状态。
1.2 失效可运行或失效降级安全模式
车载智能计算基础平台重要硬件需考虑冗余设计,确保发生故障时能够快速切换到备用模块。软件采用分层架构,各层之间通过定义接口进行交互,降低耦合度,保证软件模块的独立性;重要的软件功能模块设计冗余机制;加强软件各层的容错处理,发生故障时可以自动重启、重试或开启备用模块,避免整体系统失效。
1.3 安全测试用例库
构建标准化的功能安全测试用例库,测试用例有明确的预期结果和合格判断标准,支撑开展面向多样化复杂场景的仿真测试与实车测试;注重构建持续的数据收集和反馈机制,软件运行过程中持续监控返回的数据,不断丰富和完善测试用例,积极推动功能安全测试由经验驱动向数据驱动转变。
1.4 产品过程管理
充分集成并严格优化现有安全工程流程,实施贯穿“概念、研发、生产、运维、报废”全流程的安全管理,确保功能安全可覆盖产品全过程。
1.5 人工智能安全
保证自动驾驶通用模型算法的开发流程严格遵守功能安全要求;确保模型经过足量学习训练且通过测试验证,在真实场景下具备良好鲁棒性和容错性;保证车用大模型内容生成的安全性和合规性,确保模型训练数据或参数通过测试验证;确保 AI 计算单元、通用计算单元等硬件的随机失效率满足安全要求。
二、预期功能安全
以失效风险预防、探测、消除为核心的传统功能安全体系已无法满足自动驾驶车辆的安全保障需求,需要聚焦因设计不足或性能局限风险的预期功能安全(SOTIF)。为最大限度保障汽车预期功能安全,车载智能计算基础平台应符合 ISO 21448 和ISO/AWI PAS 8800 相关要求,综合应用功能优化、性能提升、风险监测防护、异构冗余设计等多种安全保障手段,在设计开发、分析评估、验证确认、测试评价、功能改进、发布等环节予以全面保障。
2.1 功能性能提升
为适配新型外部传感器、处理大流量实时数据,在感知定位、决策规划、控制执行领域进行软硬件优化,提高智能驾驶功能的场景适应性。软件层面,面向各类感知决策算法,从模型选择、网络结构、训练策略、数据质量等方面优化调整,重点考虑车用大模型、对抗训练、迁移学习、高效数据清洗、数据增强等技术,尽可能多和可靠地适应各种驾驶场景。硬件层面,应进一步优化硬件单元的计算及处理性能和能效,综合提升车载智能计算基础平台处理的可移植性、准确性、鲁棒性、实时性。
2.2 风险监测防护
聚焦 SOTIF 场景长尾效应导致的未知风险,建立感知定位、决策规划、控制执行相关风险监测模型。对自动驾驶场景的复杂程度进行分类,并与自动驾驶不同级别的功能进行场景科学适配,降低不安全未知场景的自动驾驶风险。综合利用外部感知信息和车辆动力学信息,分析汽车所处环境与设计运行域关系,提高预期功能安全风险综合认知能力,及时通过功能限制或请求驾驶员接管以降低风险。注重基于关键场景数据反馈的系统更新优化机制,加强数据驱动下的持续迭代学习,依托 OTA 等远程升级技术共同构建具备自学习、自适应的 SOTIF 风险防护体系。
2.3 多层级异构冗余设计
针对单一软硬件的局限性及设计不足,考虑关键部件、关键系统的异构冗余设计。感知层面,应采用多传感器融合方案,综合各类传感器在不同场景下的优势,分别在数据级、特征级及目标级实现融合,提高环境要素识别完整性。决策层面,应考虑规则驱动与数据驱动相结合的混合决策机制,以提高决策过程及结果的可靠性、可解释性。控制层面,应注意完善面向中、高风险工况的冗余控制方案。系统层面,可考虑“高阶+低阶”的自动驾驶系统冗余配置方案,避免单一风险导致整体安全问题,同时可通过多组件间的互补提高整体功能性能。
2.4 测试评估
为确保预期功能安全风险可接受,应推行基于优先场景库的高效自动驾驶测试方法,并遵循 SOTIF 双层安全接受准则开展量化评估。测试方面,应注意场景要素的合理解耦,依据要素敏感性、严重度、暴露频次等综合评估筛选出场景优先度子集,建立优先场景库;构建高效高保真的仿真模型,开展基于优先场景库的自动驾驶仿真测试,提高自动驾驶测试效率,用更少的测试里程达到更充分的验证效果。
评估方面,应严格遵循危害行为事件接受准则、总体安全风险接受准则、自动驾驶里程累积测试终止原则等基本原则,通过可控性、SOTIF信心度等安全度量指标,量化评估自动驾驶车辆预期功能安全水平。
三、网络安全
网络安全旨在保障平台网络系统软硬件及数据不因偶然或恶意原因被破坏、更改、泄露,是智能网联汽车设计、开发、生产、应用、运营、维护全生命周期中不可或缺的关键要素。网络安全保障应遵循最小权限设计、周期性安全测试、攻击面收敛等原则,同时需坚持整体安全观,综合考虑安全风险识别、安全防护、安全响应以及韧性抗毁等方面。
3.1 安全风险识别与管理
为提升网络安全防护的精准性和高效性,应加强对安全风险的识别、共享和规范管理。安全风险识别方面,应开展平台网络安全检测,从传感器干扰欺骗、AI 对抗攻击、越权访问、软件漏洞、系统后门等安全风险入手,结合其危害性和延续性,综合评估风险等级。依据优先级实施风险应对措施。推动共享网络安全信息情报,落实已知漏洞和网络威胁对策,构建威胁数据及防护产品标准库。网络安全风险管理方面,应强调构建全过程的网络安全保障能力,建立平台供应链网络安全责任共担机制,将操作系统等重点防护和平台整体防护相结合。
3.2 安全可信基础能力建设
为了确保车载智能计算基础平台基础能力的安全可靠性,需要强化安全可信基础能力建设。综合运用硬件安全模块(HSM)、可信执行环境(TEE),建立信任锚点,构建跨域认证机制,形成计算平台的安全可信基础能力。
需要融合身份认证、网络安全监护、数据加密、实名注册等安全措施,同时兼顾车载模块资源紧缺因素,建议采用轻量化防护措施,提升车载智能计算基础平台安全可信的能力。
需要加强车载智能计算基础平台设计、建设、运行、维护等服务实施安全管理,采购安全可信的网络产品和服务,确保供应链安全。此外,需要制定车载智能计算基础平台相关技术标准、管理标准和过程标准等,为保障其基础能力安全可控提供标准化参考准则。
3.3 纵深防御体系构建
车载智能计算基础平台需要建立具备纵深防御、长期监控和全生命周期的网络安全防护体系。需考虑平台与外部环境、平台与车内网络各节点的访问隔离及网络层安全;需要考虑从硬件、固件、系统软件到功能软件的全栈软硬件防护,并建议将加密认证、防火墙、异常检测等防护标准化、模块化,以方便供给侧实现;需要考虑与车内网其他节点以及 V2X 节点和云端的传输安全。
车载智能计算基础平台也要求其内部多域之间的访问控制和监控、与执行器传输的高等级认证和加密要求、更多代码安全、海量数据的存储安全如防泄漏功能,以及相应的 OTA 升级支持等等。
同时,需对车载智能计算基础平台运行状态、产生输出的数据、车载网络流量等方面进行实时监测和风险评估,强化车载通信端口与路侧通信设备、服务云平台等节点网络通信的监测能力,防范网络侵入、数据窃取、远程控制等安全风险,防止车载智能计算基础平台隐私数据泄漏、重要数据非法出境等异常情况。
3.4 网络弹性赋能
为了提升对已知及未知网络攻击威胁的容忍能力,传统网络安全范畴需要向网络弹性赋能方向演进发展。智能网联汽车作为复杂物理信息系统,容易遭受各类已知及未知的网络攻击威胁。传统网络安全侧重从预防、抵御两方面制定防护目标及措施,难以提升智能网联汽车应对未知网络攻击的快速恢复、主动适应的能力。因此,需要建立涵盖预防、抵御、恢复和适应等安全能力。车载智能计算基础平台需要建立能够感知抵御已知及未知威胁的弹性防护能力。强调构建、设计、开发、实施、维护和维持平台的可信度。实施融合安全策略,运用内生安全、动态防御、安全监控等技术,使平台具有预测、感知、承受、恢复和适应不利条件和攻击的能力。
四、数据安全
车载智能计算基础平台是整车数据的汇集和处理核心,须充分重视数据安全。车载智能计算基础平台在数据的开发利用上要依法依规开展,满足合规要求。国际层面,以欧盟通用数据保护条例(GDPR)为代表,规定未经数据主体同意,原则上禁止处理敏感个人数据;我国为规范数据处理活动,保障数据依法有序自由流动,发布了《数据安全法》、《个人信息保护法》,对敏感个人信息的收集、处理等进行严格要求,并以此为基础,不断推出和完善关于智能网联汽车数据安全的政策法规、标准体系,为数据安全保障提供了具体指引和实施参考。
车载智能计算基础平台要建立以数据为中心、面向业务数据流转、按需防护的数据安全管理体系。对平台设计、研发、生产、运维、报废等过程中涉及的数据分级分类,明确数据分类分级的安全技术保护要求。构建以数据收集、存储、使用、传输、删除和出境安全为核心的数据安全技术体系。数据安全保障措施应与车载智能计算基础平台产品同步规划、同步建设、同步使用,围绕数据处理的各个场景,实现数据全过程保护。
五、 软件升级安全
设计并建立车载智能计算基础平台软件升级安全防护体系,不仅是智能网联汽车安全性要求,也是影响车辆系统基础功能稳定运行的关键因素。软件升级是使系统保持具备最新功能和更高安全性的根本途径,但是软件升级环节也面临较为严重的安全威胁,针对软件升级包和升级过程的篡改、破坏、窃取、伪造等攻击手段给系统以及行车安全带来巨大风险和安全隐患。
车载智能计算基础平台需遵照各类政策法规与标准要求建立可靠的软件升级安全保障体系。针对车辆软件升级,国际上出台了 R156 法规,即《关于就软件更新与软件更新管理系统批准车辆的统一规定》,我国的强制性国标《汽车软件升级通用技术要求》已进入审查阶段,用以支撑对汽车生产企业的软件研发管理体系以及车辆升级功能的监管与规范。
车载智能计算基础平台软件升级安全,需在软件发布和升级使用中通过有效的安全建设方法和技术手段,确保软件升级的安全可靠。建议车辆制造商要建立软件升级管理体系,并加强软件升级安全测试体系与安全基础保障能力,在已有技术要求与管理机制基础上,参考网络安全与数据安全体系架构,梳理智能网联汽车安全相关标准、规范,以标准属性作为分类维度构建体系框架,逐步健全和完善系统软件升级全流程管控体系。
软件升级包的真实性和完整性应受到保护,以合理方式防止软件包被破坏并阻止无效的软件更新,设备端需部署保护机制,确保仅可执行经过安全认证和完整性校验的软件升级包。在用户安全与合法性层面,须制定可靠的软件升级策略,特别对于 OTA 升级,须按规定要求进行备案,并且无论采用 OTA 模式还是传统有线升级模式,在软件升级前后需尽到用户告知义务,并在功能层面禁止非驻车模式、电量不足等情况下的软件升级,避免安全隐患。
对于可能出现的升级失败场景,具有自动回滚机制,确保设备系统始终可恢复至安全状态。最后,设备系统需具备记录升级过程的能力,对于每次软件升级,系统需按规范要求记录数据信息并保存规定
时限,以供安全审计使用。
六、融合安全
数据安全、网络安全、功能安全和预期功能安全在智能网联汽车身上并不是孤立存在的,它们相互影响,甚至特定条件下相互转化,产生了严重的融合安全问题。面对融合安全问题,依靠单方面安全已无法保障系统安全,亟需进行功能安全、预期功能安全、网络安全及数据安全的协同研究,突破各类安全领域的共性技术问题,更加系统地保障智能网联汽车产品安全。
依托 V 型开发流程,从融合安全风险辨析、一体化防护、协同联动测试、综合论证评估及全生命周期监测五个阶段开展:在融合安全风险辨析阶段,重点研究融合安全特征及风险传递机理、协同相关项定义、威胁/危害识别及融合安全目标分类分级的相关内容;在融合安全一体化防护阶段,重点考虑协同优化设计、一体化安全架构及安全机制冲突解决等内容;在融合安全协同联动测试阶段,重点关注基于“三支柱”的联动测试方法及在具体测试过程中,测试对象、人员、场景、用例与工具等的协同;在融合安全综合论证评估阶段,构建融合安全多层级评价指标系统,依托全面的安全体系进行系统安全确认。面向全生命周期开展融合安全监测,包含融合态势感知、异常监测预警相关内容。

内容来源:
https://mp.weixin.qq.com/s/2OogQtEiY1LcfXpPs19WSQ
- THE END -
因文章部分文字及图片涉及到引用,如有侵权,请及时联系17316577586,我们将删除内容以保证您的权益。

