

点击蓝字 关注我们
对于高压开关电源应用,碳化硅或 SiC MOSFET 与传统硅 MOSFET 和 IGBT 相比具有显著优势。SiC MOSFET 很好地兼顾了高压、高频和开关性能优势。它是电压控制的场效应器件,能够像 IGBT 一样进行高压开关,同时开关频率等于或高于低压硅 MOSFET 的开关频率。之前的文章中,我们介绍了SiC MOSFET 特有的器件特性。今天将带来本系列文章的第二部分SiC栅极驱动电路的关键要求和NCP51705 SiC 栅极驱动器的基本功能。

为了补偿低增益并实现高效、高速开关,SiC 栅极驱动电路需要满足以下关键要求:
SiC MOSFET 的最大/最小 VGS 是不对称的,在 +25 V/-10 V 范围附近。栅极驱动电路必须能够提供接近 35 V 的全范围(即 VGS 摆幅)电压,以便充分利用 SiC 的性能优势。大多数 SiC MOSFET 在 -5 V > VGS > 20 V 的驱动电压下表现最佳。为了覆盖更多的 SiC MOSFET,栅极驱动电路应能承受 VDD = 25 V 和 VEE = -10 V
VGS 必须具有快速的上升沿和下降沿(约几纳秒)
在整个米勒平台区域,必须能够提供约几安培的峰值栅极电流
当 VGS 降至米勒平坦区域以下时,需要提供极低阻抗的下拉或“钳位”,灌电流能力即由这一需求决定。灌电流额定值应超过用于对 SiC MOSFET 的输入电容进行放电所需的电流。10 A 数量级的最小峰值灌电流额定值被视为适合覆盖高性能半桥电源拓扑结构
VDD 欠压锁定 (UVLO) 电平必须在不满足 VGS > ~16 V 的条件才开始切换
必须有 VEE UVLO 监控能力来确保负电压轨在可接受范围内
必须具有能够检测、故障报告和保护的去饱和功能,以确保 SiC MOSFET 的长期可靠运行
低寄生电感以支持高速开关
驱动器封装应较小,可以安装在尽可能靠近 SiC MOSFET 的位置
为了驱动 SiC MOSFET 高效、可靠地工作,需要非常特定类型的栅极驱动器。然而,目前业界展示的大多数参考设计都是基于使用通用低边栅极驱动器而设计的。一个这样的例子如图 8 所示。

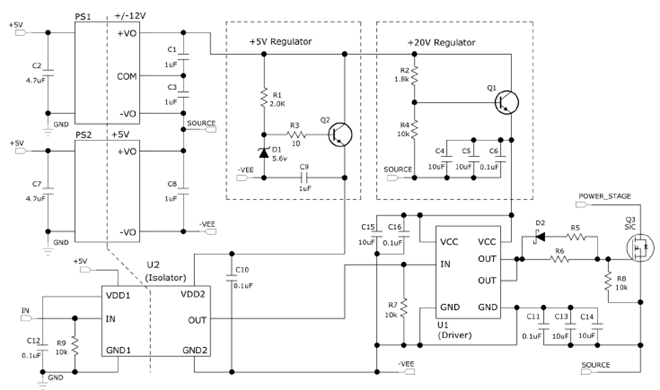
图 8.标准低边驱动器、SiC 分立式栅极驱动器设计示例
所示电路相对于地是浮动的,因此它可以用作低边或高边参考栅极驱动器。对于任何一种情况,如果出现功率级故障,都需要隔离以保护控制电路免受功率级高压的影响。使用了两个隔离的 DC-DC 转换器,其中 PS1 提供 VDD = 24 V(后调节至 20V),而 PS2 则配置为调节 VEE = -5 V。这两个转换器用于提供 VDD 和 VEE 电压轨。还应该提到的是,这些转换器专用于驱动单个 SiC 负载,因此每个 SiC 负载需要两个。对于高边栅极驱动应用尤其如此,例如半桥、全桥或电机驱动应用中的上部开关。主驱动器上的电压 U1 会浮动数百伏,并且非常容易受到与开关 SiC MOSFET 相关的高 dV/dt 的影响。假设 dV/dt=100 V/ns,PS1(或 PS2)变压器隔离栅上的杂散寄生电容仅为 1 pF,会产生 100 mA 的峰值电流。100 mA/pF 意味着需要低寄生电容、低杂散电感以及 VEE(和 VDD)电压轨和栅极驱动器 IC 之间的紧密耦合。
数字隔离器 U2 将栅极驱动信号与功率级隔离开来,并提供必要的电平转换。之后,U2 的次级侧用作主驱动器 U1 的输入。U1 是通用的低边栅极驱动器,但额定值必须能够处理全 VGS 25 V 的电压摆幅 (-5 V < VGS < 20 V) 并提供所需的拉电流/灌电流能力。由于大多数通用低边栅极驱动器的额定最大 VDD = 20 V,可能无法提供足够的拉电流/灌电流,并且可能无低电感封装可用,可能仅限于几个特定的选择。
这些类型的栅极驱动器旨在驱动硅 MOSFET,从这个角度来看,它们无法满足 SiC MOSFET 所需的几个重要要求。例如,这些栅极驱动器没有过流故障报告或 DESAT 监控功能。此外,通用栅极驱动器的 UVLO 阈值通常基于 5 V < VDD < 12 V。这可能是有问题的,因为“安全的”VDD SiC MOSFET 的工作电平约为启动时 VDD > ~16 V。并且,没有 UVLO 监控用于 VEE 电压轨,如图 8 参考设计中所示。标准低边驱动器、SiC 分立式栅极驱动器设计示例。这些电压轨需要在别处进行监控,以确保在导通期间将 SiC MOSFET 驱动到低电阻状态,以及在关断期间将栅极保持在负电压水平。
虽然图 8 所示的解决方案提供驱动 SiC MOSFET 的必要功能,但它是不完整的,至少根据分立式 SIC 栅极驱动部分开头所述的栅极驱动要求是如此。尽管如此,由于没有专用的 SiC 驱动器,目前大多数 SiC 栅极驱动电路都是这样设计的。DESAT、电压轨监控、工作次序等任何附加功能要么由附加专用电路处理,要么全部忽略。
NCP51705 是一种 SiC 栅极驱动器,具有高度的灵活性和集成性,使其与市场上的任何 SiC MOSFET 完全兼容搭配使用。如图 9 所示,NCP51705 顶层框图包括通用栅极驱动器常见的许多基本功能,包括:
高达 28 V 的 VDD 正电源电压
高峰值输出电流(6 A 灌电流 和 10 A 拉电流)
内部 5 V 参考电压可用于偏置 5 V、高达 20 mA 的低功率负载(数字隔离器、光耦合器、微控制器 等)
独立的信号地和电源地
独立的灌、拉电流引脚
内部热关断保护
独立的同相和反相 TTL、PWM 输入
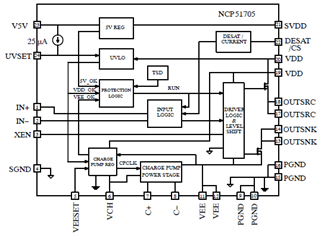
图 9.NCP51705 SiC 栅极驱动器框图
此外,NCP51705 具备使用最少的外部组件设计可靠的 SiC MOSFET 栅极驱动电路所必需的几个独特特性(在分立式 SIC 栅极驱动部分的开头列出)。NCP51705 独特的优点将在下一节详细介绍。
NCP51705 DESAT 功能的实现只需使用两个外部组件。如图 10 所示,通过 DESAT 引脚的 R1 和 D1 监测 SiC MOSFET, Q1 的漏极-源极电压。
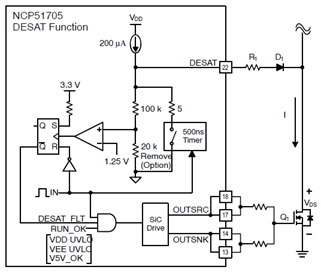
图 10.NCP51705 DESAT 功能
在 Q1 关断期间,漏极-源极端子可能出现几百伏电压。一旦 Q1 导通,漏极-源极电压迅速下降,预计在不到几百纳秒的时间内就会发生从高电压到接近零电压的转变。在导通转换期间,DESAT 信号前沿被一个 500 纳秒计时器消隐,该计时器连接一个 5 Ω 的低阻抗下拉电阻。这使 VDS 有足够的时间下降,同时确保 DESAT 不会意外触发。500 纳秒过后,DESAT 引脚被计时器释放,200 mA 电流源通过 R1、D1 和 SiC MOSFET 导通电阻提供恒定电流。在导通时间内,如果 因为发生短路故障使得DESAT 引脚上升到 7.5 V 以上,则 DESAT 比较器输出会升高,从而触发 RS 触发器的时钟输入。这种短路故障将逐个周期自动终止 Q_NOT 输出的后沿。SiC MOSFET 的栅极驱动电压将被迅速降低, 降低的速度和功率器件去饱和故障时间成比例。
200 mA 电流源足以确保 D1 的正向压降,同时也使 R1 的压降能够在 SiC MOSFET 导通期间独立于 VDS。如果需要,可通过将 DESAT 引脚接地来禁用 DESAT 保护。相反,如果 DESAT 引脚处于浮动状态,或者 R1 失效断路,则200 mA 电流源会流经 20 kΩ 电阻器并在 DESAT 比较器的同相输入端施加恒定的 4 V 电压。这种条件下,基本上禁用了 SiC MOSFET 的栅极驱动。还有一些应用可能倾向于使用电流检测变压器来检测漏极电流,并从外部驱动 DESAT 引脚。在这种情况下,NCP51705 包括一个 IC 选购型号,移除 了20 kΩ 电阻器,使 DESAT 引脚可以用作传统的逐脉冲、过电流保护功能。
DESAT 引脚上的电压 VDESAT 由公式 (6) 确定为:

为 ID 确定最大值(留出额外的设计裕度)后,选择 R1 和 ID,使 Vdesat < 7.5 V。重新排列公式 (6) 并求解 R1 得出:

除了设置允许的最大 VDESAT 电压外,R1 还具有限制通过 D1 结电容的瞬时电流大小的双重目的。因为 SiC MOSFET 的漏极电压变化率 dV/dt 极高,如果 R1 的大小不合适,通过 D1 的 p-n 结电容的电流可能会变得非常高。因此,应优先选择具有最低结电容的快速恢复高压二极管。R1 的典型值将接近 5 kΩ< R1 < 10 kΩ 的范围,这会根据所选 SiC MOSFET 的 Id 和 Rds 参数而发生变化。如果 R1 远小于 5 kΩ,进入 DESAT 引脚的瞬时电流可能为数百毫安。相反,如果 R1 远大于 10 kΩ,则 RC 延迟为 R1 和 Di 结电容的乘积。延迟可为 100 μs 量级,从而导致应对 DESAT 故障的额外延迟时间。
NCP51705 使用单一的正电源电压运行。从单一 VDD 电源电压运行意味着必须由栅极驱动器 IC 自身产生负 VEE 电压。使用开关电容电荷泵是产生所需负 VEE 电压轨的必然选择。构建电荷泵有许多不同的选择。主要挑战是在瞬态条件下保持准确的电压调节,以一定的频率开关以减小电容量,并最大限度地减少外部组件数量,从而降低成本并提高可靠性。
从图 11 所示的电荷泵功能框图可以看出,只需三个外部电容即可建立负 VEE 电压轨。电荷泵功率级基本上由两个 PMOS 开关和两个 NMOS 开关组成,这些开关以桥式结构排列。
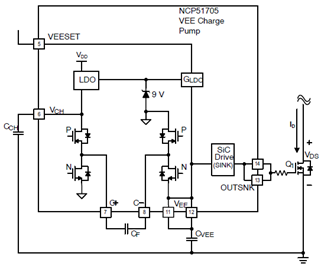
图 11.NCP51705 Vee 电荷泵
如图所示,外部飞跨电容 CF 连接在两个半桥桥臂的中点之间。开关时序是这样的:每当两个上部 PMOS 器件同时导通时, VDD电压会施加在CF两端。同样,每当两个下部 NMOS 器件同时导通时,-VEE 会施加在CF。开关频率在内部设置为 390 kHz,两个上部 PMOS 器件与两个下部 NMOS 器件异步切换。290 kHz 的 IC 选购型号也可用于需要较低电荷泵开关频率的应用。
VEE 被调节到 VCH 处 的电压,该VCH 处电压由 通过VEESET 可编程的内部低压降稳压器 (LDO) 电压决定。VEESET 上的电压会改变内部 LDO 看到的增益 (GLDO)。如果 VEESET 被悬空(建议使用从 VEESET 到 SGND 的 100−pF 旁路电容),则 Vee 设置为 −3 V 的驱动电压。如果需要 −5 V的驱动电压,VEESET 引脚应直接连接到 V5V(引脚 23)。如果 VEESET 连接到 9 V 和 Vdd 之间的任何电压,则 VEE 被箝位并设置为 −8 V 。当 VDD > 7.5 V 时,电荷泵启动,VEE 电压轨的电路部分包括一个内部固定的 UVLO,设置为 VEE 设定值的 80%。由于 VDD 和 VEE 均由独立的 UVLO 电路监控,所以NCP51705 足够智能,对于给定的SiC MOSFET可以使得两个电压轨都保持在安全范围内。
或者,通过完全禁用电荷泵,可以实现 0 V < OUT < VDD 输出。当 VEESET 连接到 SGND 时,电荷泵被禁用。当电荷泵被禁用且 VEE 直接与 PGND 相关联时,输出在 0 V < OUT < VDD 之间切换。需要注意的是,每当 VEESET 与 SGND 相关联时,VEE 必须与 PGND 相关联。在此工作模式期间,内部 VEE UVLO 功能也相应禁用。
另一种可能的配置是禁用电荷泵,但允许使用外部负 VEE 电压轨。此选项允许 -VEE < OUT < VDD 输出,因为电荷泵未工作,所以在 IC 功耗方面略有节省。当 VEESET 连接到 SGND 时,外部负电压轨可以直接在 VEE 和 PGND 之间连接。请注意,由于 VEESET 为 0 V,内部 VEE UVLO 被禁用,因此 NCP51705 不知道 VEE 电压水平是否在规定范围内。
这种简单的 VEESET 调整能够使用最少的外部组件实现最高程度的灵活性,同时满足最广泛的 SiC MOSFET 电压要求。为了方便起见,表 3 中总结了 VEESET 的可配置性。
表 3. 半导体材料属性

用于栅极驱动器 IC 的 UVLO 对于保护 MOSFET 至关重要,其工作原理是禁用输出,直到 VDD 高于已知阈值。这不仅可以保护负载,而且可以向控制器确认施加的 VDD 电压高于导通阈值。由于与 SiC MOSFET 相关的低 gm 值,最佳导通阈值的UVLO并非“一刀切”。允许驱动器输出在较低的 VDD 下开关,可能对某个 SiC MOSFET 不利,但根据散热片、散热器和 VDD 启动时间,对另一个 SiC MOSFET 而言可能是可接受的。最佳 U导通阈值的UVLO也会根据 VDD 电压轨的产生方式而发生变化。一些电源系统可能有一个专用的偏压电源,而其他系统则可能依赖于类似于图 13 的 VDD 自举技术。
NCP51705 通过可编程 UVLO 导通阈值解决了这一需求,该阈值可通过 UVSET 和 SGND 之间的单一电阻器设置。如图 12 所示,UVSET 引脚由 25−μA 电流源内部驱动,串联增益为 6。
UVSET 电阻器 RUVSET 根据公式 (8) 中定义的所需 导通电压UVLO进行选择。

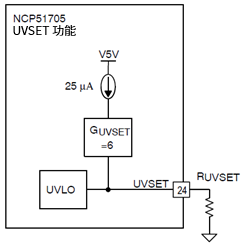
图 12.NCP51705 UVSET 可编程 UVLO
VON 值通常由 SiC MOSFET 输出特性曲线决定,如图 1 中突出显示的曲线。由于 即使 VGS 略有降低,SiC MOSFET 的导通电阻也会显著增加,因此允许的 UVLO 滞后必须很小。因此,NCP51705 具有固定的 1-V 迟滞,关断电压 VOFF 始终比设置的 VON 低 1 V。
对于包含专用偏压电源的电源,在电源系统因故障恢复而启动软启动或重启之前,一般认为VDD 高于所需的 VON 阈值。对于此类系统,1-V UVLO 迟滞是必要的,并且不会因启动条件而产生任何影响。然而,一些电源系统从高电压取电,然后依赖于自举电路和变压器绕组的 VDD产生方式如图 13 所示。
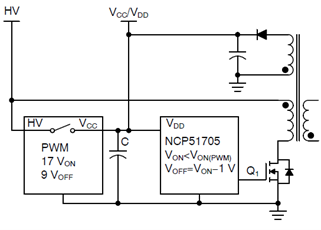
图 13.PWM 自举启动示例
图中显示了具有高电压 (HV) 启动能力以及 VON = 17 V 和 VOFF = 9 V 的固定 UVLO 阈值的 PWM 控制器。施加 HV 时,当 HV = VON = 17 V,内部通道开关打开,PWM 控制器从 CVCC 汲取启动电流。在此期间,CVCC 正在放电,Q1 必须开始切换,以在变压器自举绕组中建立电压。这对可允许的VON 电压(该电压可从 RUVSET 编程)施加了限制。UVSET 必须设置为小于 PWM 控制器的 UVLO VON 的值。图 14 进一步说明了这些启动细节,其中 PWM 电压阈值显示为蓝色,NCP51705 显示为红色。
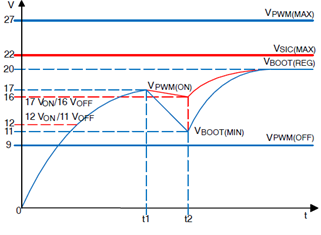
图 14.自举启动时序
为了以尽可能高的 VGS 开关 SiC MOSFET,需要将 VON 设置为尽可能接近 PWM 控制器的导通UVLO。比如,在 Δt (t2-t1) 期间 ΔV = 1 V。这表明CVCC 的放电非常浅,因此需要较大的电容值。例如,假设启动电流为 1 mA,Δt = 3 ms 且 ΔV = 1 V,则需要 3-μF 的CVCC 电容。相反,如果 VON 设置为比最小自举放电电压 VBOOT(MIN) 高 1 V,则意味着允许 CVCC 在更宽的 ΔV (17 V - 11 V) 范围内放电,因此可以使用更小的电容值。给定相同的 1 mA,Δt = 3 ms 且允许 ΔV = 6 V,所需的 CVCC 电容值降低至 500 nF;减少了 6 倍。然而,由于 SiC MOSFET 将在 VGS = 11 V 的情况下开关,因此所产生的影响可能很大。显然,在启动前给 NCP51705 提供一个偏置电压是首选方法。
XEN 信号是由 和栅极驱动信号VGS 反相的 5 V 数字表示。为了报告驱动器“状态”,PWM 输入被认为更准确,因为它来自内部 SiC 栅极电压发生电路,传输延迟很低。此信号可以在半桥电源拓扑中用作故障标志和同步信号,为实施交叉导通(cross-conduction)保护提供基准。每当 XEN 为高、VGS 为低时,则 SiC MOSFET 为关断状态。因此,如果 XEN 和 PWM 输入信号均为高,则检测到故障状态,这个故障信号可以灵活运用来实现各种保护功能。
⭐点个星标,茫茫人海也能一眼看到我⭐


