一、前言
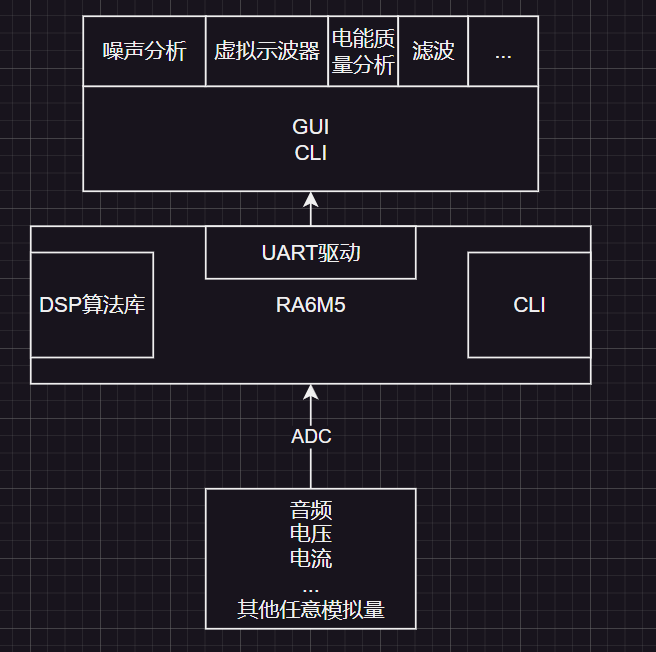
本项目基于瑞萨RA6M5 ADC进行信号采集,DSP算法库进行信号分析,实现信号处理分析前端。
基于此实现各种信号分析的应用场景,比如电能质量分析、噪声分析、虚拟示波器、滤波器等等,All In One并且方便扩展更多的应用,是一个瑞士军刀类型的工具集。并且设计了命令行交互等,可以和上位机进行交互、可视化,或者供其他主机调用。
本文尽可能详细地介绍整个实现过程。框图:
二、准备
2.1 安装RASC和MDK
参考相关资料,这里不再赘述
2.2 芯片手册
下载芯片手册链接:https://www.renesas.cn/cn/zh/products/microcontrollers-microprocessors/ra-cortex-m-mcus/ra6m5-200mhz-arm-cortex-m33-trustzone-highest-integration-ethernet-and-can-fd#overview
2.3 熟悉原理图
原理图等资料可以如下地址下载
https://doc.embedfire.com/products/link/zh/latest/mcu/renesas/ebf_ra.html
这里对基本的接口熟悉,其他模块用到再去看原理图。
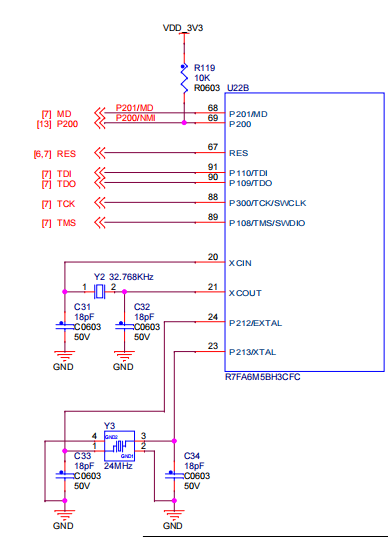
2.3.1 时钟
提供了24MHz的外部晶体,接P212和P213可以使用其作为系统时钟源
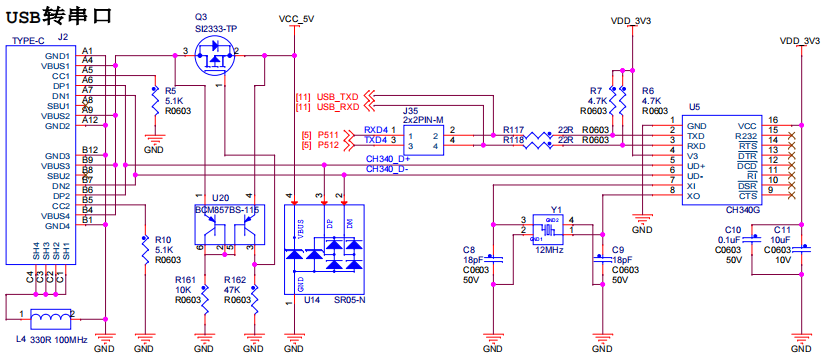
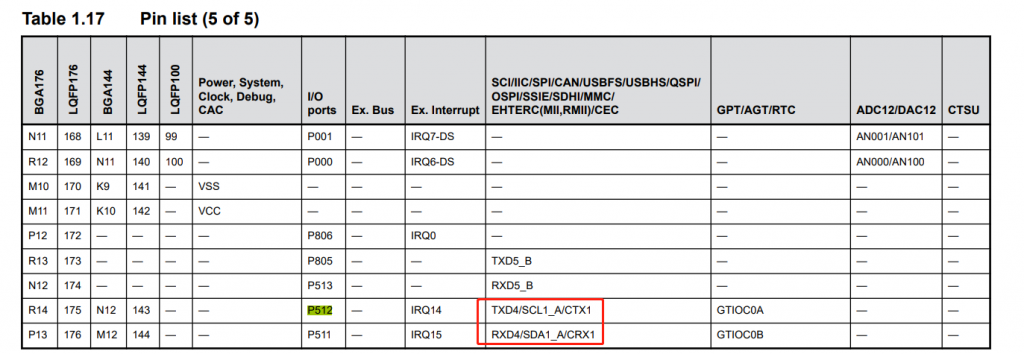
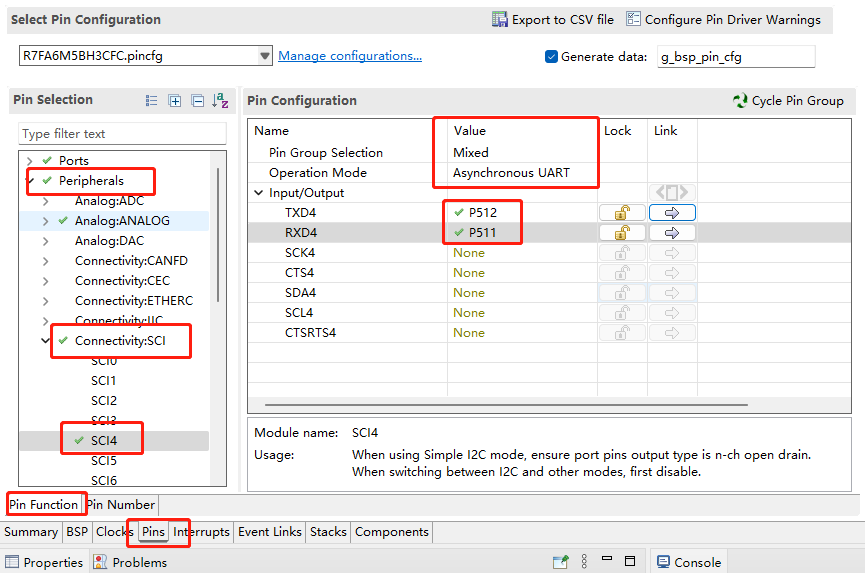
2.3.2调试串口
使用CH340G实现USB转串口接P511,P512
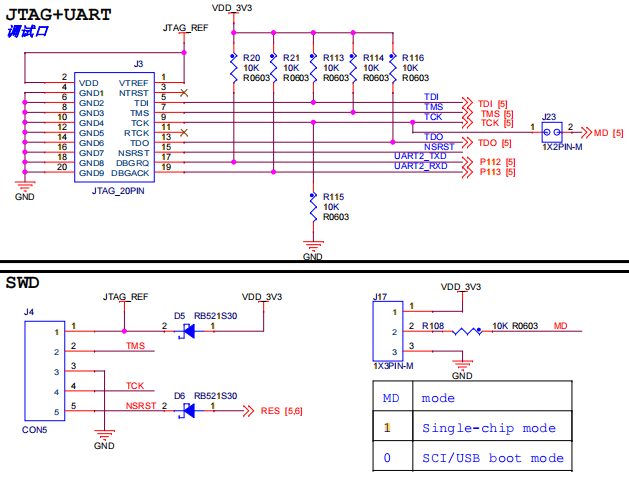
2.3.3 仿真与BOOT接口
全引脚JTAG可以接20PJTAG接口,SWD可以使用J4,我这里使用SWD。另外J17默认短接12为单芯片运行模式,短接23则为SCI/USB BOOT模式。
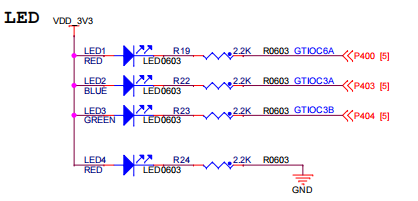
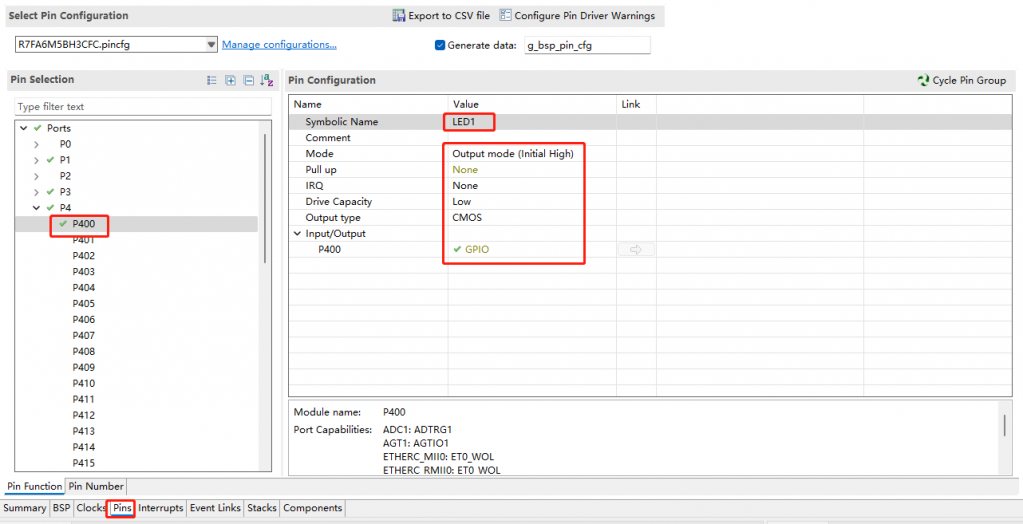
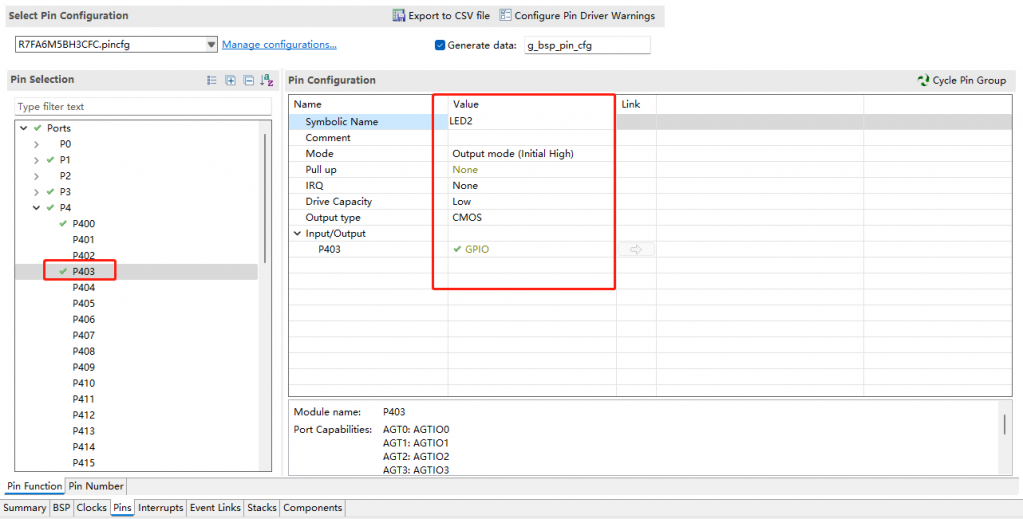
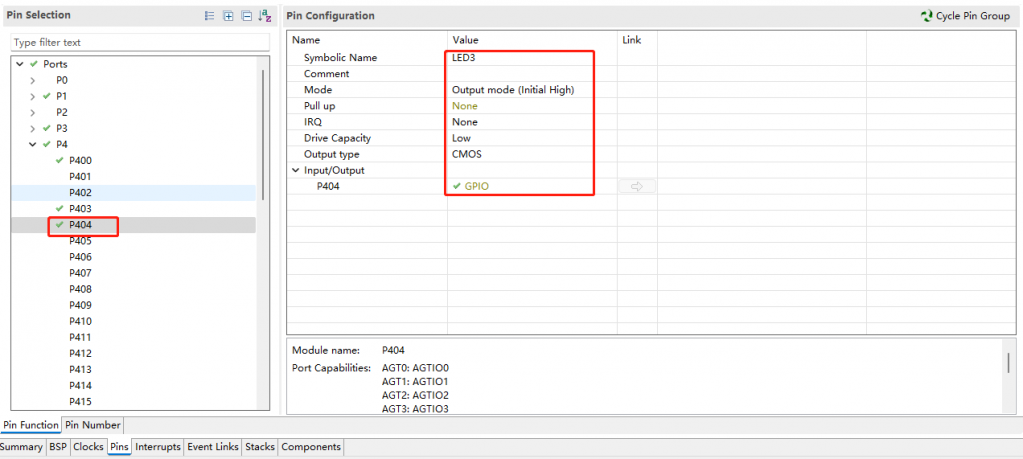
2.3.4LED
三个LED接P400 P403 P404
三、创建工程
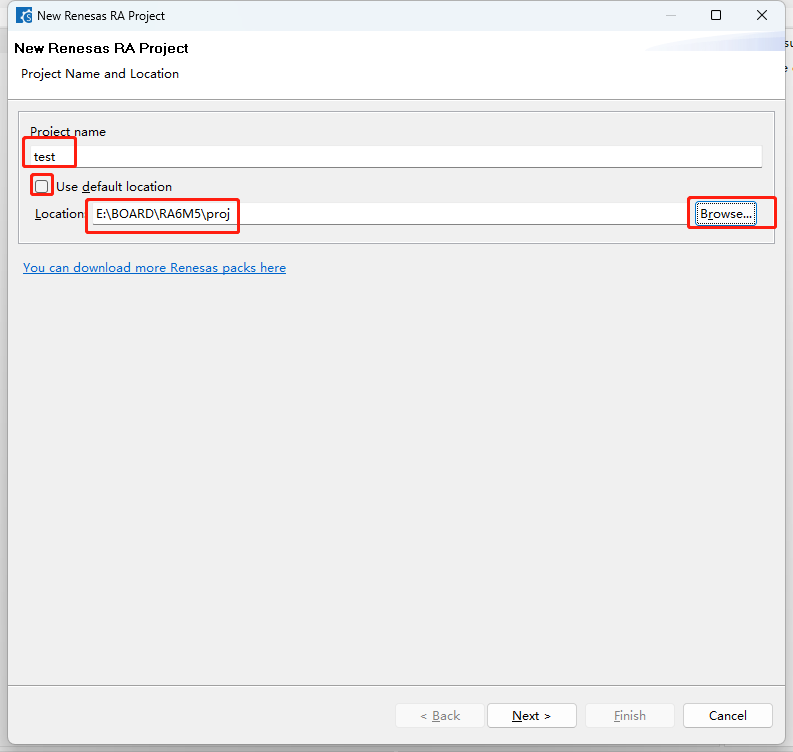
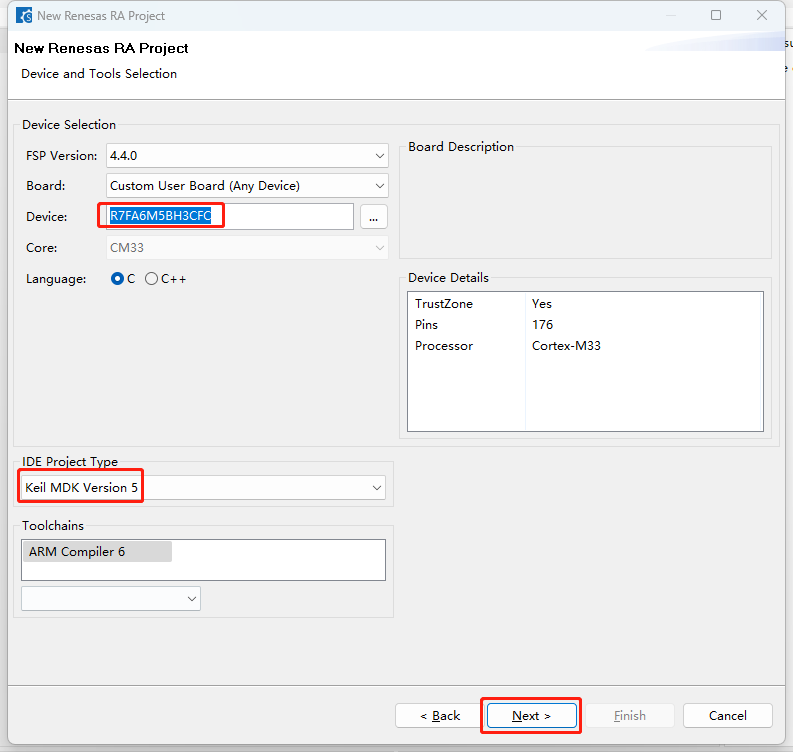
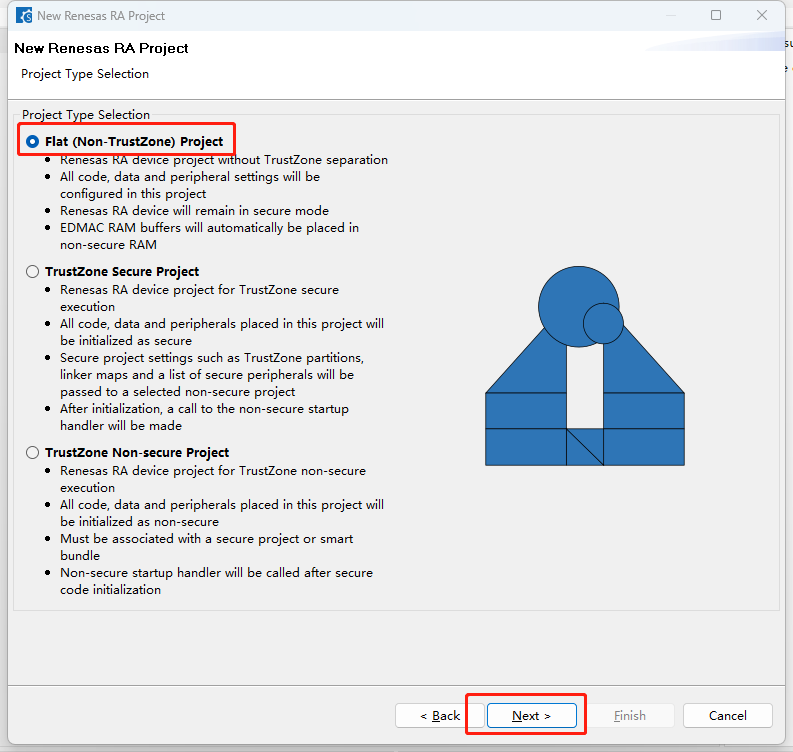
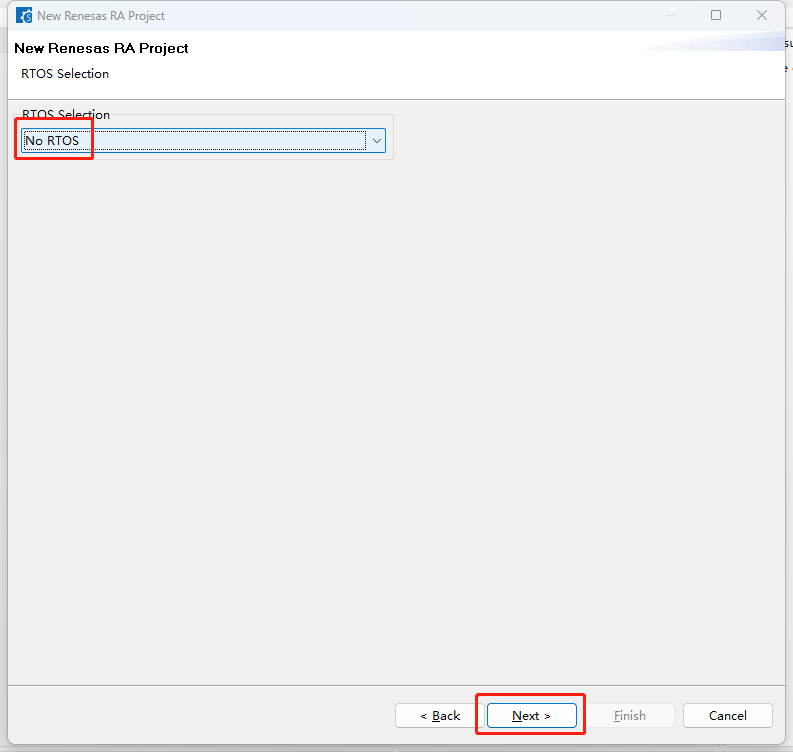
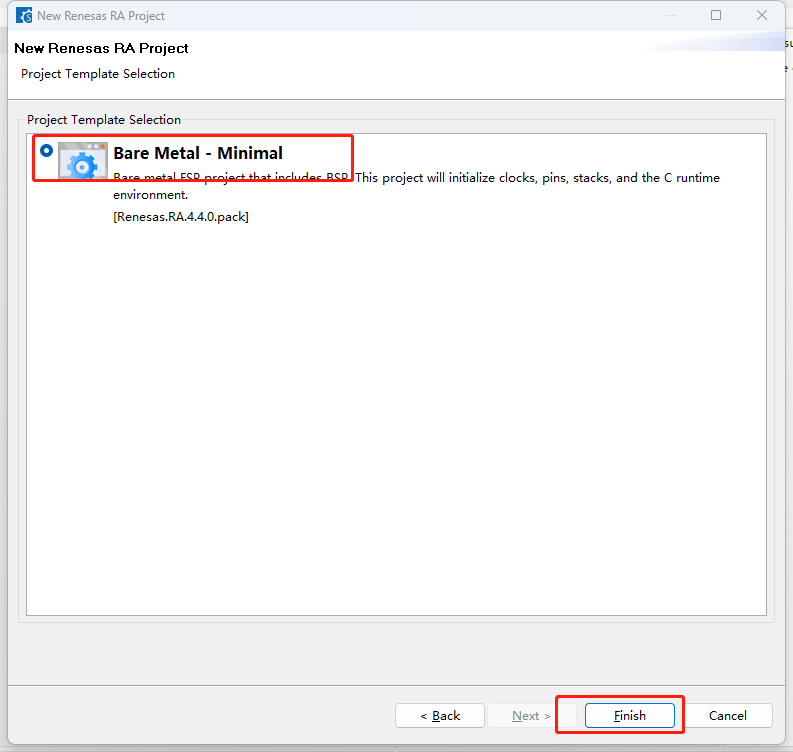
3.1 创建工程
打开RASC指定工程目录,设置工程名->Next
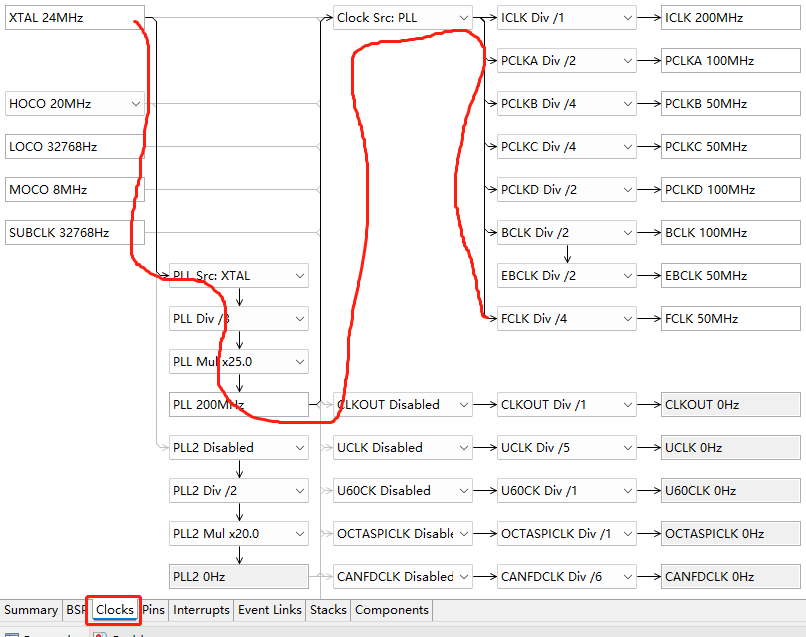
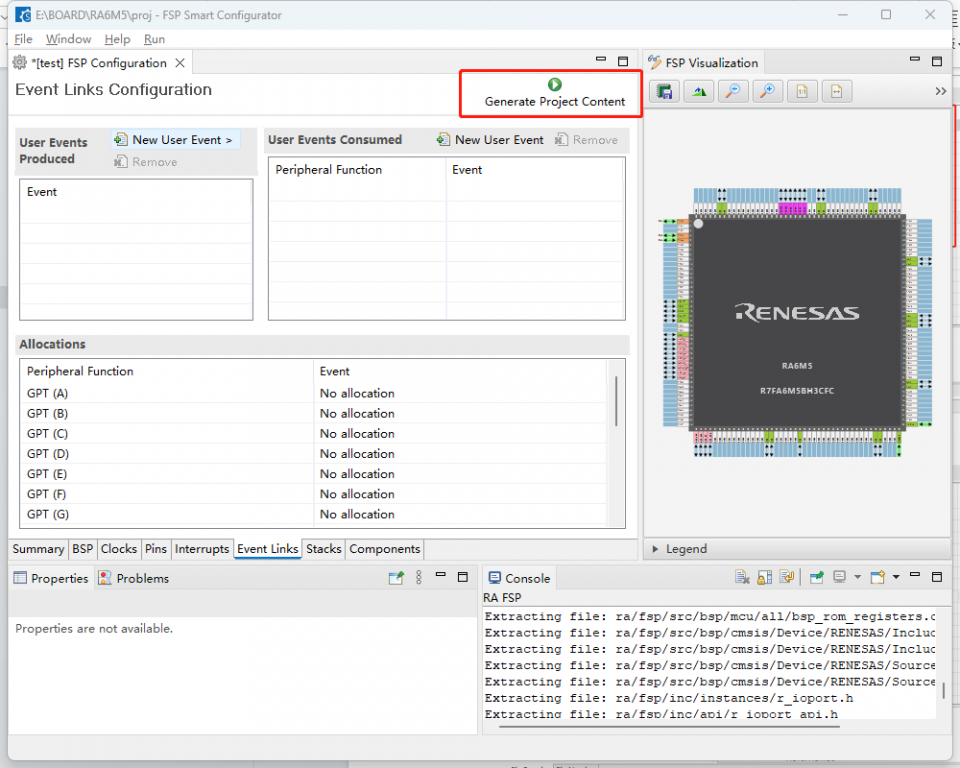
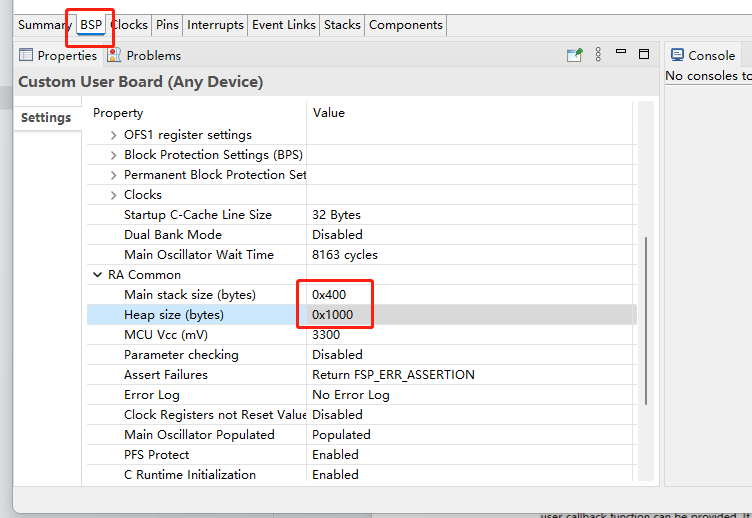
3.2 配置BSP
时钟配置前面我们看到原理图提供了24MHz外部晶体我们就使用该晶体做欸时钟源,通过PLL得到系统时钟,如下所示
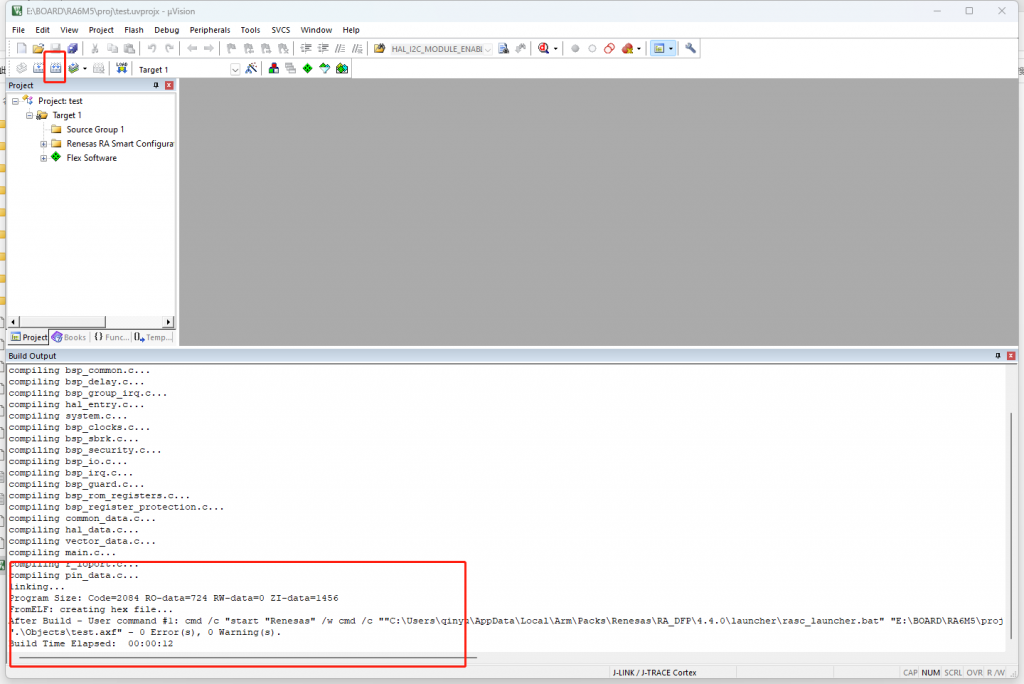
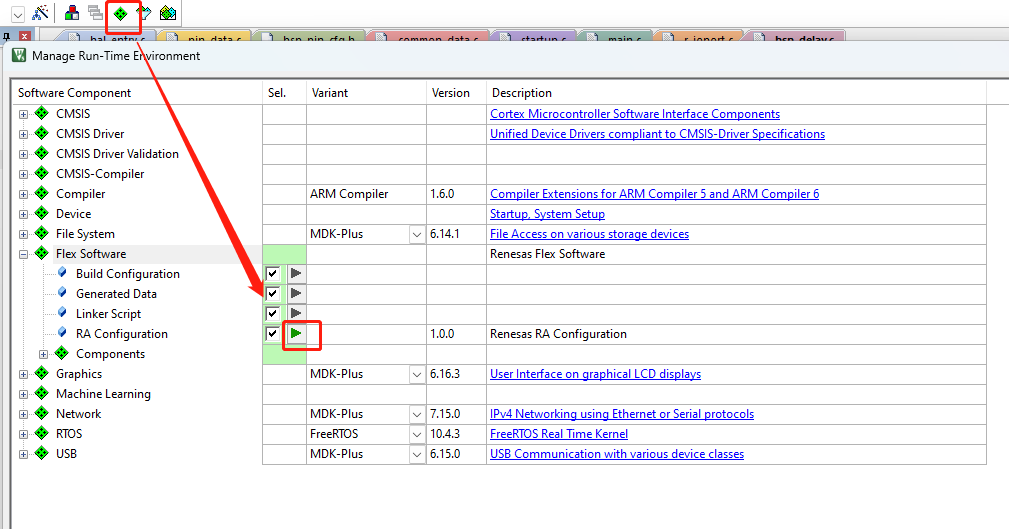
3.3 MDK配置
使用MDK打开test.uvprojx
先编译没问题
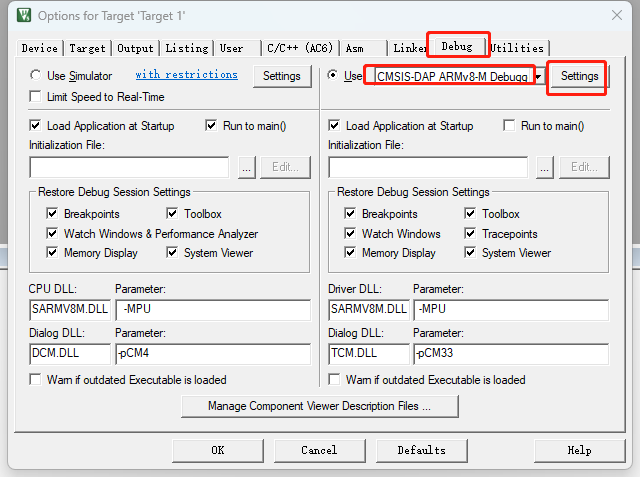
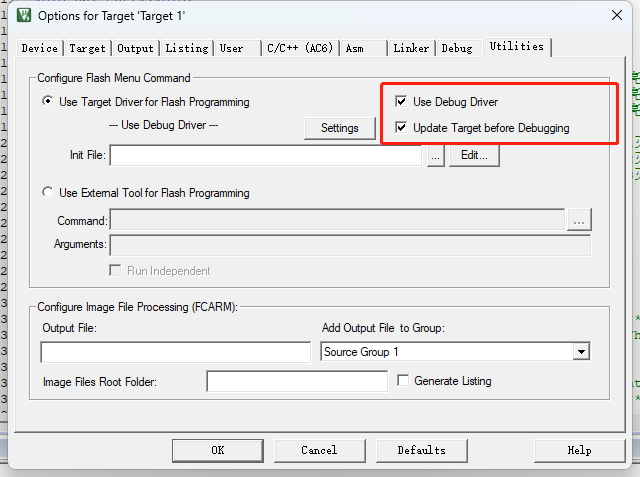
右键点击Target1->Options For Target ‘Target 1’
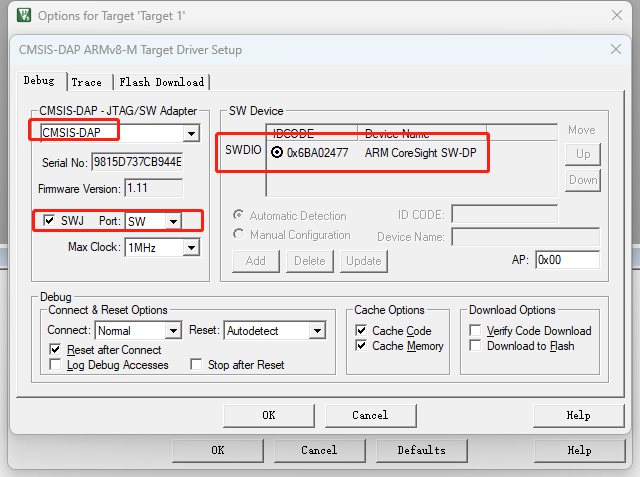
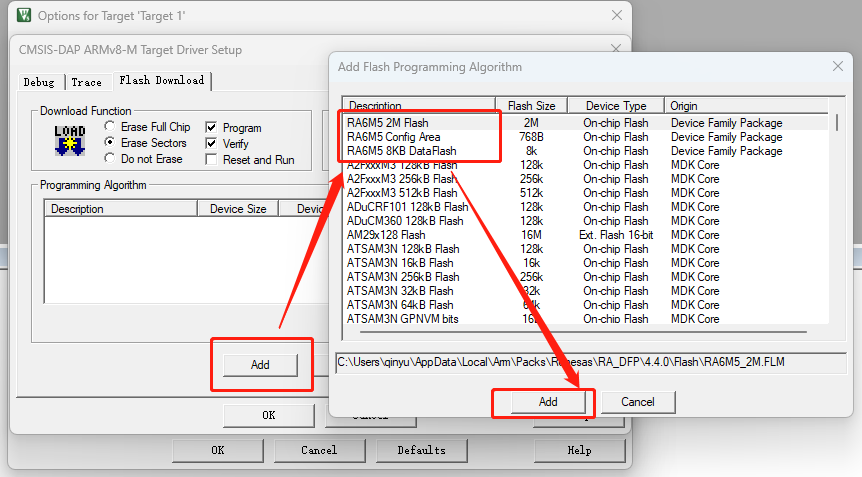
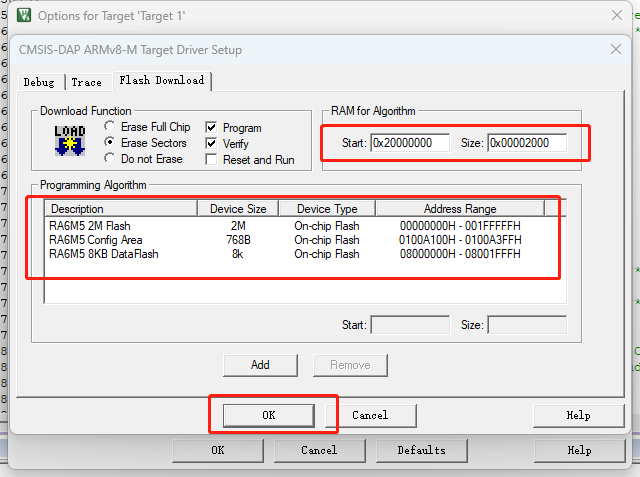
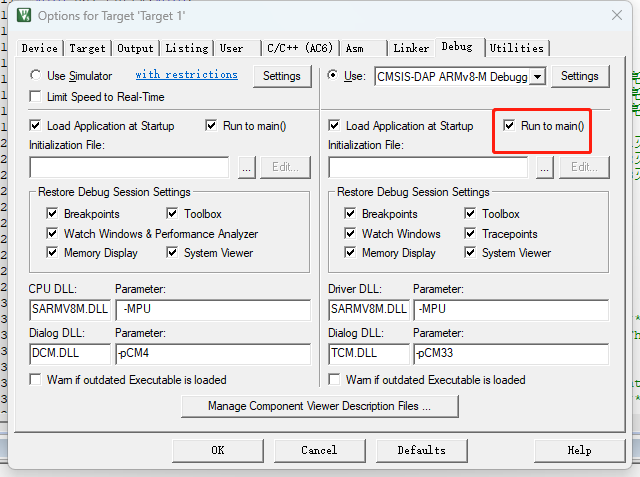
选择仿真器CMSIS_DAP然后点击Settings
四、LED控制
4.1 代码
我们可以看到配置的P400 P403 P404在pin_data.c中如下
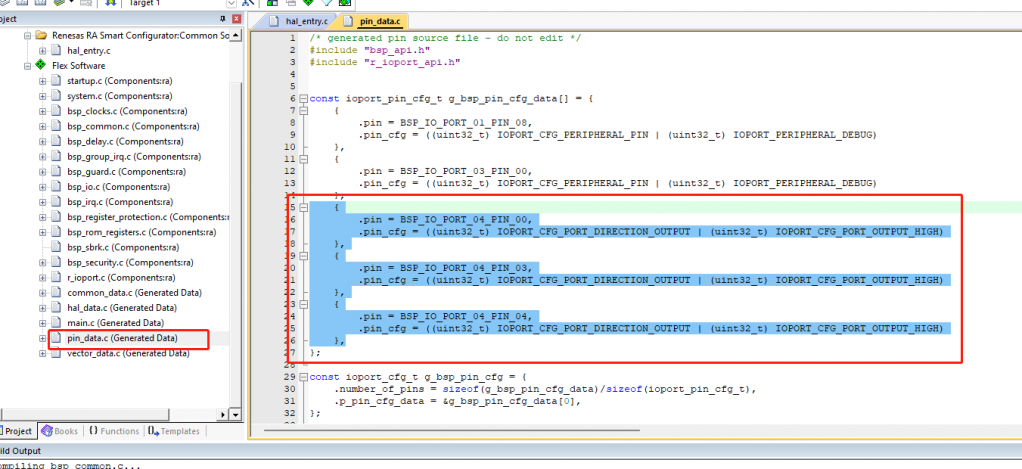
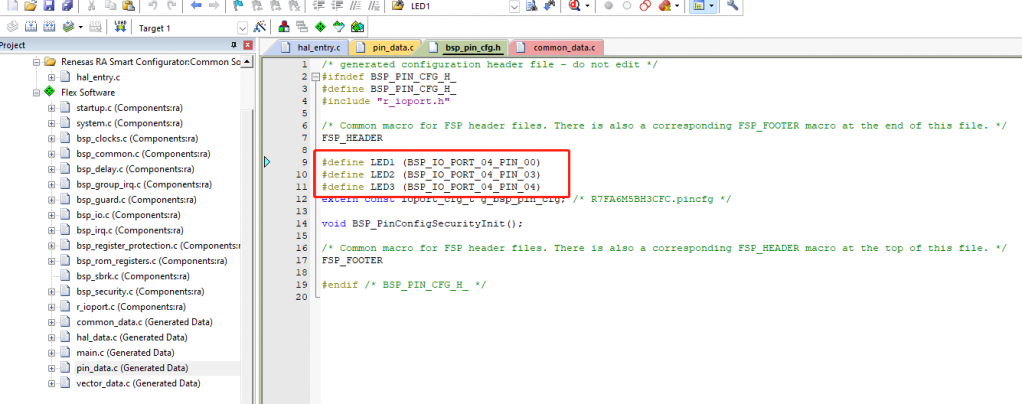
R_IOPORT_PinWrite(&g_ioport_ctrl, LED1, BSP_IO_LEVEL_LOW); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, LED2, BSP_IO_LEVEL_LOW); //LED2亮R_IOPORT_PinWrite(&g_ioport_ctrl, LED3, BSP_IO_LEVEL_LOW); //LED3亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒R_IOPORT_PinWrite(&g_ioport_ctrl, LED1, BSP_IO_LEVEL_HIGH); //LED1灭R_IOPORT_PinWrite(&g_ioport_ctrl, LED2, BSP_IO_LEVEL_HIGH); //LED2灭R_IOPORT_PinWrite(&g_ioport_ctrl, LED3, BSP_IO_LEVEL_HIGH); //LED3灭R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒
修改代码后再次编译代码。
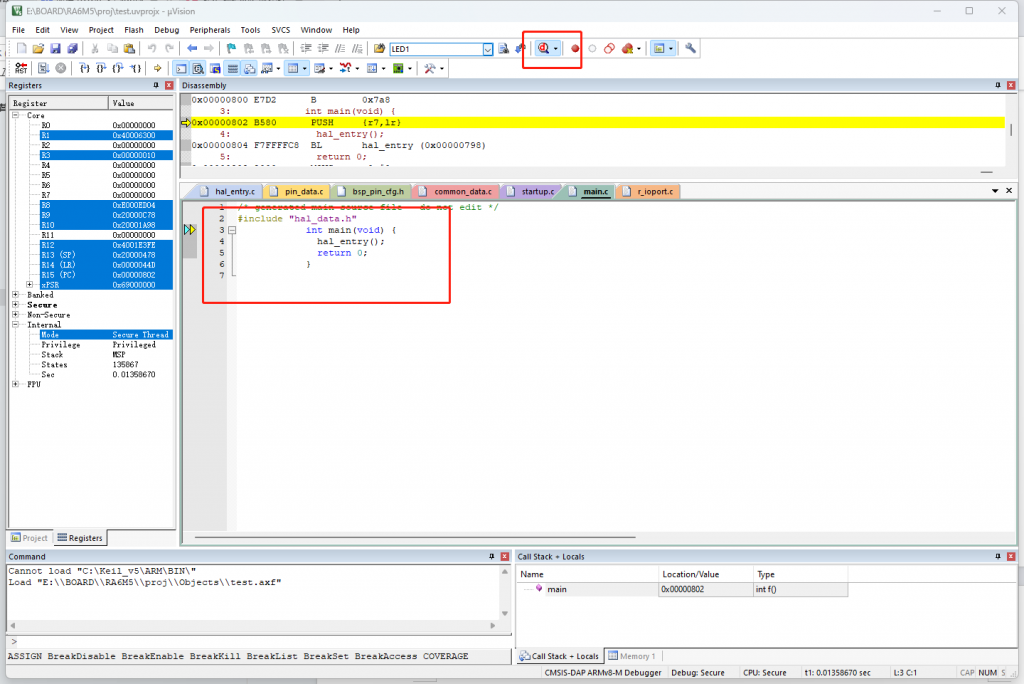
4.2仿真调试
点击如下图标仿真并运行到main函数处
五、串口收发

volatile static int send_flag = 0;void uart_init(void){fsp_err_t err = FSP_SUCCESS;err = R_SCI_UART_Open (&g_uart4_ctrl, &g_uart4_cfg);assert(FSP_SUCCESS == err);}void uart_write(uint8_t* buffer, uint32_t len){fsp_err_t err = FSP_SUCCESS;send_flag = 0;err = R_SCI_UART_Write(&g_uart4_ctrl, buffer, len);while(send_flag==0);}void uart_callback (uart_callback_args_t * p_args){uint8_t val = 0;switch (p_args->event){case UART_EVENT_RX_CHAR:{/* 把串口接收到的数据发送回去 */val = *(uint8_t *)&(p_args->data);//R_SCI_UART_Write(&g_uart4_ctrl, (uint8_t *)&(p_args->data), 1);uart_write(&val, 1);break;}case UART_EVENT_TX_COMPLETE:{send_flag = 1;break;}default:break;}}
uart.h函数接口
void uart_init(void);
六、串口驱动
typedef struct{uint32_t datalen_u32;uint32_t maxlen_u32;uint32_t in_u32;uint32_t out_u32;uint8_t* buffer_pu8;}ring_buffer_t;uint8_t uart_ring_buffer[128];ring_buffer_t s_ring_buffer_t={.datalen_u32 = 0,.maxlen_u32 = sizeof(uart_ring_buffer),.in_u32 = 0,.out_u32 = 0,.buffer_pu8 = uart_ring_buffer,};
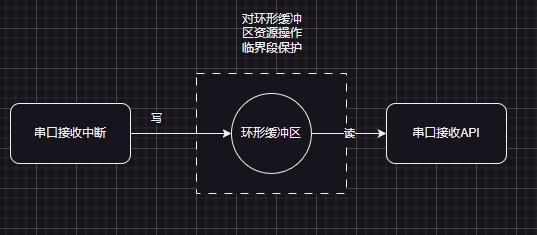
6.2 临界段处理
缓冲区在中断和API中都需要操作,所以需要临界段保护,采用简单的开关中断方式。
Enter_Critical();
Exit_Critical() ;6.3 串口接收中断
调用uart_rx_handler进行处理
void uart_callback (uart_callback_args_t * p_args){uint8_t val = 0;switch (p_args->event){case UART_EVENT_RX_CHAR:{/* 把串口接收到的数据发送回去 */val = *(uint8_t *)&(p_args->data);//R_SCI_UART_Write(&g_uart4_ctrl, (uint8_t *)&(p_args->data), 1);//uart_write(&val, 1);uart_rx_handler(&val, 1);break;}case UART_EVENT_TX_COMPLETE:{send_flag = 1;break;}default:break;}}void uart_rx_handler(const uint8_t *buffer, uint32_t length){uint32_t i;for(i=0;i{if(s_ring_buffer_t.datalen_u32 < s_ring_buffer_t.maxlen_u32){s_ring_buffer_t.buffer_pu8[s_ring_buffer_t.in_u32] = buffer;s_ring_buffer_t.datalen_u32++;s_ring_buffer_t.in_u32++;s_ring_buffer_t.in_u32 %= s_ring_buffer_t.maxlen_u32;}else{/* full */break;}}}
6.4 实现发送字节接口
uart.c中
void uart_sendbyte(uint8_t ch){uint8_t val = ch;uart_write(&val, 1);}
6.5 发送API
int drv_uart_write(uint8_t *buff, uint32_t len){uint32_t i;for(i=0; i{uart_sendbyte(buff);}return 0;}
6.6 接收API
uint32_t drv_uart_read(uint8_t *buff, uint32_t len){uint32_t readlen = 0;//uint32_t mask;if(s_ring_buffer_t.datalen_u32 == 0){return 0;}Enter_Critical();uint32_t i;for(i=0;i{if(s_ring_buffer_t.datalen_u32 > 0){buff = s_ring_buffer_t.buffer_pu8[s_ring_buffer_t.out_u32];s_ring_buffer_t.datalen_u32--;s_ring_buffer_t.out_u32++;s_ring_buffer_t.out_u32 %= s_ring_buffer_t.maxlen_u32;readlen++;}else{break;}}Exit_Critical();return readlen;}
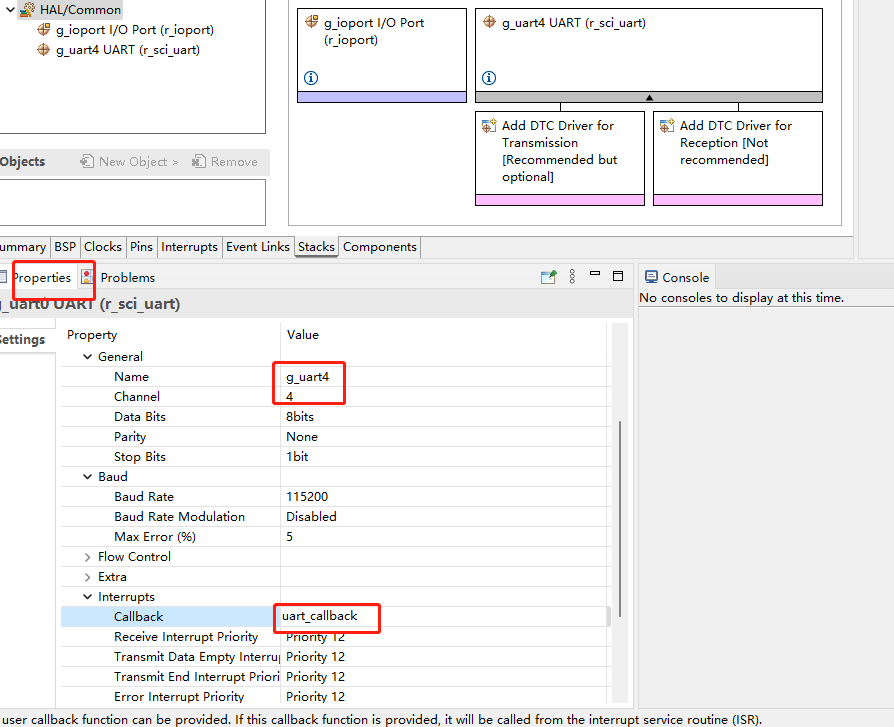
6.7 串口初始化
使用之前的初始化
void uart_init(void){fsp_err_t err = FSP_SUCCESS;err = R_SCI_UART_Open (&g_uart4_ctrl, &g_uart4_cfg);assert(FSP_SUCCESS == err);}
6.8 代码
drv_uart.ctypedef struct{uint32_t datalen_u32;uint32_t maxlen_u32;uint32_t in_u32;uint32_t out_u32;uint8_t* buffer_pu8;}ring_buffer_t;uint8_t uart_ring_buffer[128];ring_buffer_t s_ring_buffer_t={.datalen_u32 = 0,.maxlen_u32 = sizeof(uart_ring_buffer),.in_u32 = 0,.out_u32 = 0,.buffer_pu8 = uart_ring_buffer,};void uart_rx_handler(const uint8_t *buffer, uint32_t length){uint32_t i;for(i=0;i{if(s_ring_buffer_t.datalen_u32 < s_ring_buffer_t.maxlen_u32){s_ring_buffer_t.buffer_pu8[s_ring_buffer_t.in_u32] = buffer;s_ring_buffer_t.datalen_u32++;s_ring_buffer_t.in_u32++;s_ring_buffer_t.in_u32 %= s_ring_buffer_t.maxlen_u32;}else{/* full */break;}}}uint32_t drv_uart_read(uint8_t *buff, uint32_t len){uint32_t readlen = 0;//uint32_t mask;if(s_ring_buffer_t.datalen_u32 == 0){return 0;}Enter_Critical();uint32_t i;for(i=0;i{if(s_ring_buffer_t.datalen_u32 > 0){buff = s_ring_buffer_t.buffer_pu8[s_ring_buffer_t.out_u32];s_ring_buffer_t.datalen_u32--;s_ring_buffer_t.out_u32++;s_ring_buffer_t.out_u32 %= s_ring_buffer_t.maxlen_u32;readlen++;}else{break;}}Exit_Critical();return readlen;}int drv_uart_write(uint8_t *buff, uint32_t len){uint32_t i;for(i=0; i{uart_sendbyte(buff);}return 0;}void drv_uart_init(uint32_t baud){(void)baud;}drv_uart.hvoid drv_uart_init(uint32_t baud);uint32_t drv_uart_read(uint8_t *buff, uint32_t len);int drv_uart_write(uint8_t *buff, uint32_t len);void uart_rx_handler(const uint8_t *buffer, uint32_t length);extern void uart_sendbyte(uint8_t ch);
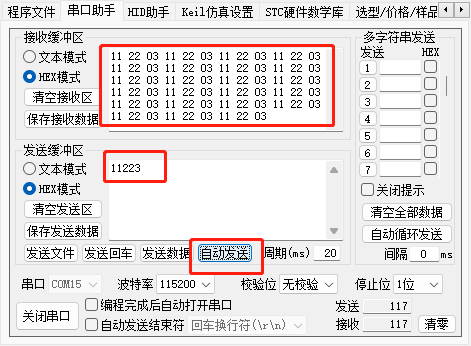
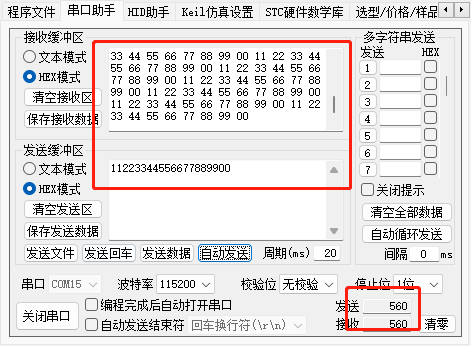
6.9 测试
uint8_t buffer[128];for(;;){uint32_t len=0;if((len = drv_uart_read(buffer, sizeof(buffer))) >0){drv_uart_write(buffer, len);}}
复制下方网址到浏览器中打开进入瑞萨中文论坛了解更多:
https://community-ja.renesas.com/zh/frums-groups/mcu-mpu/
未完待续
推荐阅读
【瑞萨RA MCU创意氛围赛作品赏析】项目8——NES游戏机
【瑞萨RA MCU创意氛围赛作品赏析】项目9——环境温湿度监测装置
【瑞萨RA MCU创意氛围赛作品赏析】项目10——物联网居家环境/健康监控设备