

功能业务代码写多了,回看代码会发现用if-else if-else用的越来越多,因为有很多场景需要区分,不同场景下的功能不一样,因此需要通过if做判断,场景一旦多了起来起来,用if-else if-else就会越来越多。
这里的
if-else if-else通常是用来区分不同场景下的功能实现,和上篇提到的表驱动编程还不太一样。
为了避免这种情况,本编介绍一种开发方法--状态机编程。

为什么需要状态机编程?相信很多人在实现
if判断的时候,偶尔会出现不小心漏掉或者写错一些触发条件,导致功能出现异常的问题,特别是一些复杂的逻辑条件,一大堆的&&/||/()等眼花缭乱的复杂逻辑,写完之后恐怕自己都得检查好一会,担心是不是哪个条件不能正常触发。状态机通常采用switch-case实现。那么状态机的引入解决了哪些问题呢?
当程序有多个状态时,规范了程序的状态转换,避免了一些引入一些复杂的判断逻辑。
规范了程序在不同状态下的实现和所能提供的能力。
在能力上可以进行横向扩展,提供新的状态来完善现有逻辑
逻辑清楚,实现过程会多考虑一些情况,方便定位问题所在
什么是状态机?
状态机是有限状态自动机(FSM)的简称,是现实事物运行规则抽象而成的一个数学模型。
简单理解就是:现实事物是有不同状态的,比如灯,就有“亮”和“灭”两种状态,再复杂抽象一点,增加一个“损坏”状态,那这属于异常情况了。
概念
现态:当前所处的状态,一个状态机至少要包含两个状态,某一时刻只能是一种状态,比如刚才说到的灯,就有“亮”和“灭”两种状态
条件:又称事件,执行某个操作的触发条件或者口令,比如灯通过开关控制,操作开关就是一个事件
动作:事件发生以后要执行动作,比如开关按下开关,灯亮,松开则灭
次态:条件满足后要迁往的新状态,比如开关按下后灯从当前灭的状态变为亮的状态
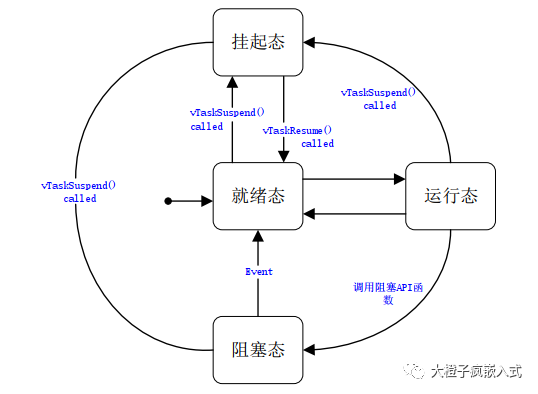
用过"RTOS"的朋友应该也知道任务的几种状态,任务的四种状态分别是:就绪态、运行态、阻塞态、挂起态,不会同时出现两种及两种以上的状态存在,OS 根据当前的状态,和任务优先级、滴答时钟、主动睡眠等条件进行任务的状态切换。
状态机的动作类型
进入动作:在进入状态时进行
退出动作:在退出状态时进行
输入动作:依赖于当前状态 和 输入条件进行
转移动作:在进行特定转移时进行
首先,看一个简单的例子,在不同场景下实现控制电机的功能:设备开机启动三次电机、开关按下一次启动一次、关机启动三次电机。采用非状态机的写法,通过各种标志位去判断设备是否需要控制电机,什么条件下退出等。
只是简单的实现一下,可能其中也有一些状态机的思想吧(毕竟状态机编程思想已经在脑海里,不可避免吧),不过我还是尽量还原我初次编程期间的实现这个功能的逻辑思想吧,勿怪。
/* 控制电机函数 */
void MotorCtrlTask(void)
{
if (ctrlCnt)
{
MotorCtrl(ON);
delay(1);
MotorCtrl(OFF);
}
else
{
MotorCtrl(OFF);
}
}
int isPowerOn = true;
int isPowerOff = false;
int ctrlCnt = 0;
void main(void)
{
while (1)
{
if (isPowerOn)
{
isPowerOn = false;
ctrlCnt = 3;
}
if (keyPress)
{
keyPress = false;
ctrlCnt = 1;
}
if (...) // 关机条件
{
if (ctrlCnt == 0 && !isPowerOff && !isPowerOn)
{
isPowerOff = true;
ctrlCnt = 3;
}
}
MotorCtrlTask();
if (ctrlCnt > 0)
ctrlCnt--;
else
{
if (ctrlCnt == 0 && isPowerOff && !isPowerOn)
{
return;
}
}
}
}
通过采用状态机编程的方式,首先考虑的就是有三种状态:开机、关机和工作状态,先理清楚三种状态之间转换的条件和当前状态需要执行的相关功能,然而在实现过程中就会意识到还需要增加一种过渡状态:关机准备中(关机过程中需要执行的一系列操作)。
只有逻辑清晰了,才会下意识的察觉少了一些东西了,特别是一些临界处理等。
int sysState = POWER_OFF; // 默认关机状态
int ctrlCnt = 0;
/* 控制电机函数 */
void MotorCtrlTask(void)
{
if (ctrlCnt)
{
MotorCtrl(ON);
delay(1);
MotorCtrl(OFF);
}
else
{
MotorCtrl(OFF);
}
}
void main(void)
{
while (1)
{
switch (sysState)
{
case POWER_OFF: // 关机状态
sysState = POWER_ON; // 自动切换成开机状态
ctrlCnt = 3;
break;
case POWER_ON: // 开机过程状态
... // 开机过程中的其他功能
if (ctrlCnt == 0) // 控制结束自动切换工作状态
{
sysState = WORKING;
break;
}
break;
case WORKING: // 工作状态
if (...) // 关机条件
{
sysState = POWER_OFF_READY;
ctrlCnt = 3;
break;
}
if (keyPress)
{
keyPress = false;
ctrlCnt = 1;
}
break;
case POWER_OFF_READY: // 关机准备中
... // 关机准备中的其他功能
if (ctrlCnt == 0) // 控制结束自动退出
{
sysState = POWER_OFF;
return; // 退出程序
}
break;
default:
break;
}
MotorCtrlTask();
if (ctrlCnt > 0)
ctrlCnt--;
}
}
总结:从上述两份代码看,你觉得哪一个逻辑更清晰呢?非状态机实现方式还有一些异常处理没有实现,比如开机过程中在启动三次调节电机过程中按下会有什么现象呢,为了避免这种情况又需要加入多少if条件判断呢?
状态机应用范围挺广的,不止是在C语言中,其他都能使用,准确来说这个属于一种编程思想。特别是业务功能,状态机是常用的。
比如常常使用的模块也有状态机的身影:比如按键的按下和松开,按下又包括按下瞬间、多次按下、持续按下、松开瞬间和持续松开等
通常状态机和表驱动可以结合使用,状态机的现态、条件、动作和次态作为数据,执行这些状态切换的作为逻辑。完全可以根据实际情况灵活使用。
菜单:菜单控制,可以这样理解:当前菜单界面为现态、菜单进入和退出为条件、菜单切换时的函数执行为动作、上下级菜单理解为次态,其中菜单选项表就灵活使用了状态机和表驱动的方式。
https://gitee.com/const-zpc/menu.git
ESP8266:AT指令数据表,包含指令、期望响应、时间和函数指针【后续的动作】等,可以这样理解:数组索引当前值为现态、收到响应和超时为条件、收到响应或超时执行的函数为动作、数组索引的未来值为次态
https://gitee.com/const-zpc/esp8266ESP8266:AT指令数据表,包含指令、期望响应、时间和函数指针【后续的动作】等,可以这样理解:数组索引当前值为现态、收到响应和超时为条件、收到响应或超时执行
2023慕尼黑华南电子展即将开幕,即刻注册、免费参观
关注公众号,
加入嵌入式交流群:

