| 主控板 |
Basra主控板(兼容Arduino Uno)
|
| 扩展板 |
Bigfish2.1扩展板
|
| 电池 | 7.4V锂电池 |
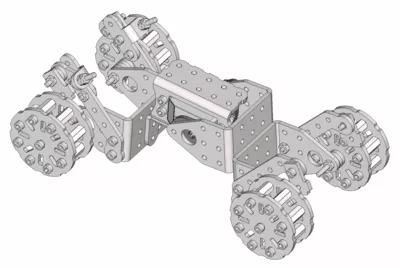
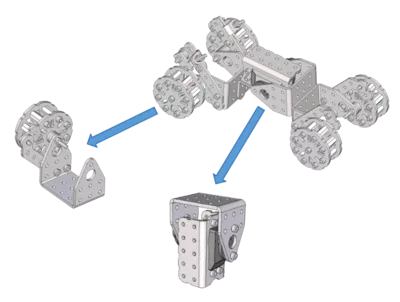
下面提供一个实现棘轮小车运动行走的参考程序(sketch_sep15b.ino):
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-09-20 https://www.robotway.com/
------------------------------*/
#include<Servo.h> //调用舵机库
#define Servo_Pin 3 //定义舵机引脚号
#define Claw_Open_Angle 165
#define Claw_Close_Angle 30
Servo myservo; //声明舵机对象
//程序初始化部分:使能舵机引脚
void setup() {
myservo.attach(Servo_Pin); //设置舵机引脚
}
void loop() {
myservo.write(Claw_Open_Angle);
delay(1000); //等待1秒
myservo.write(Claw_Close_Angle);
delay(1000); //等待1秒
}
