|
主控板
|
Basra主控板(兼容Arduino Uno)
|
|
扩展板
|
Bigfish2.1扩展板
|
|
电池
|
7.4V锂电池
|
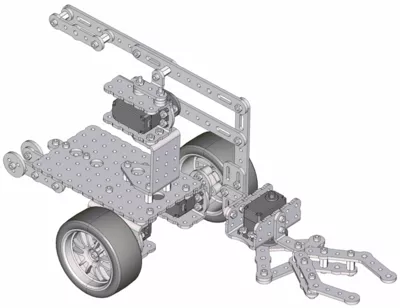
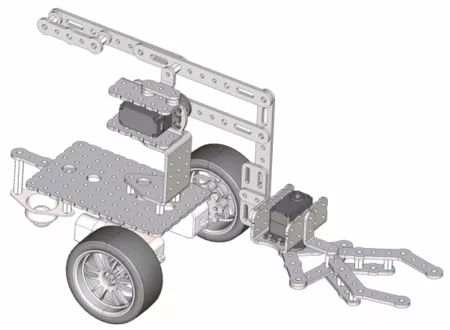
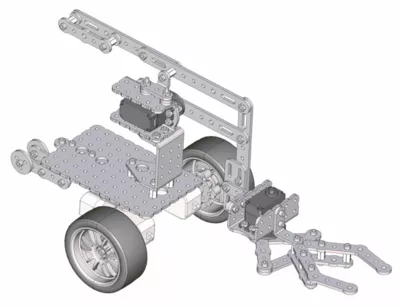
下面提供一个双轮提升搬运小车在行进过程中实现夹取功能的参考程序(sketch_sep14a.ino):
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-09-15 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
Servo armServo; // 机械臂舵机
Servo clawServo; // 夹子舵机
int armAngle = 90; // 机械臂初始角度
int clawAngle = 90; // 夹子初始角度
int leftMotorPin1 = 9; // 左电机引脚1
int leftMotorPin2 = 10; // 左电机引脚2
int rightMotorPin1 = 5; // 右电机引脚1
int rightMotorPin2 = 6; // 右电机引脚2
void setup() {
armServo.attach(4); // 机械臂舵机连接到引脚4
clawServo.attach(7); // 夹子舵机连接到引脚7
pinMode(leftMotorPin1, OUTPUT);
pinMode(leftMotorPin2, OUTPUT);
pinMode(rightMotorPin1, OUTPUT);
pinMode(rightMotorPin2, OUTPUT);
}
void loop() {
// 小车前进
forward();
delay(1000);
// 机械臂下落
moveArm(130);
delay(1000);
// 夹爪闭合
closeClaw();
delay(1000);
// 机械臂抬起
moveArm(90);
delay(1000);
// 小车后退
backward();
delay(1000);
// 夹爪张开
openClaw();
delay(1000);
}
// 控制机械臂运动到指定角度
void moveArm(int angle) {
armServo.write(angle);
armAngle = angle;
}
// 控制夹爪闭合
void closeClaw() {
clawServo.write(160); // 根据实际情况调整角度
clawAngle = 160;
}
// 控制夹爪张开
void openClaw() {
clawServo.write(60); // 根据实际情况调整角度
clawAngle = 60;
}
// 小车前进
void forward() {
digitalWrite(leftMotorPin1, HIGH);
digitalWrite(leftMotorPin2, LOW);
digitalWrite(rightMotorPin1, HIGH);
digitalWrite(rightMotorPin2, LOW);
}
// 小车后退
void backward() {
digitalWrite(leftMotorPin1, LOW);
digitalWrite(leftMotorPin2, HIGH);
digitalWrite(rightMotorPin1, LOW);
digitalWrite(rightMotorPin2, HIGH);
}