触觉对于双手的灵巧使用至关重要,因此这方面也是截肢和瘫痪病患恢复手部功能的重要组成部分。假肢系统通过集成可穿戴触觉传感器解决了这一问题。然而,这种可穿戴传感器对于旨在使病患的瘫痪手部恢复的神经假体系统来说并非最理想的解决方案。
据麦姆斯咨询报道,近日,由美国宾夕法尼亚大学(University of Pennsylvania)和俄亥俄州立大学(Ohio State University)组成的科研团队在Microsystems & Nanoengineering期刊上发表了以“An implantable, wireless, battery-free system for tactile pressure sensing”为主题的论文。该论文共同第一作者为Lin Du,通讯作者为Andrew G. Richardson和Mark G. Allen。
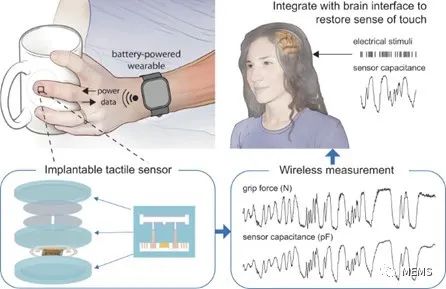
这项研究利用硅基MEMS技术开发了首款完全无线的植入式触觉传感器,避免了以往利用脆弱的电引线穿过关节的皮下隧道的要求。该传感器系统旨在与传感器控制的脑刺激和脑控制的肌肉刺激相结合,以实现为瘫痪病患提供闭环手部功能“再生”。将触觉反馈加入肢体恢复方案将是其迈向临床脑机界面(BMI)的重要一步,该方案每年有望让数以千计的新瘫痪病患重新恢复功能独立。
该无线触觉传感系统结合了微型、生物兼容的压力传感器、电池供电的无线电源和数据链路,压力传感器可以植入皮肤下任何期望位置(如手掌或指尖),无线电源和数据链路可以佩戴于手腕、手背或指甲上(如图1a)。为了实现该系统,研究人员开发了利用生物相容且密封的二氧化硅层完全封装的集成植入式平台,该平台主要由三大主要组件构成(电容式压力传感器、微型化无线传输模块、三层封装,如图1b所示)。这项研究的重要设计改进是将ASIC芯片与天线一同封装在熔融二氧化硅中,从而提供了一个具有合适尺寸、密封封装的独立传感系统,适用于皮下长期植入物的预期应用。
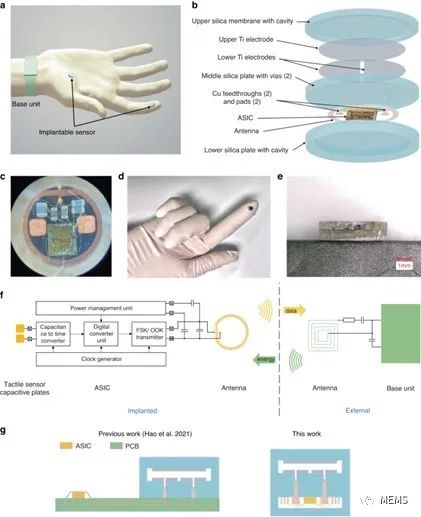
图1 无线植入式触觉传感系统
该电容式传感器的工作原理如图2所示。在不施加外力的情况下,将带有浮动电势上电极的上硅板与包含两个下电极的中间硅板平行连接(如图2a)。在存在作用于传感器膜上的法向力的情况下,上板向中间板偏转,从而减小电极间距离并增大两下电极之间的电容(如图2b)。随着受力的增加,上板进一步偏转,上电极可能会接触到下电极,从而实现接触模式操作(如图2c)。为了定量评估该传感器,使用固体力学模块和交流/直流(AC/DC)静电模块进行了COMSOL Multiphysics仿真(如图2d)。
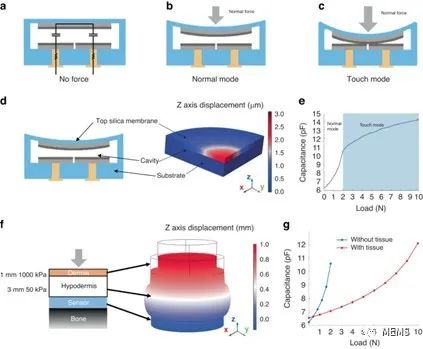
图2 传感器工作原理示意图及有限元仿真结果
通过使用力控制测试仪器直接在传感器膜上施加静态力,初步评估了微加工传感器的力-电容关系。接下来,研究人员评估了传感器在模拟皮下植入条件下的性能。相关测试和模拟结果如图3所示。
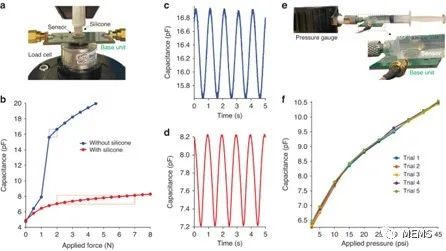
图3 “台式”传感器性能
随后,研究人员进行了一系列实验,以评估该器件在与预期触觉传感应用非常接近的条件下的性能,相关结果如图4所示。
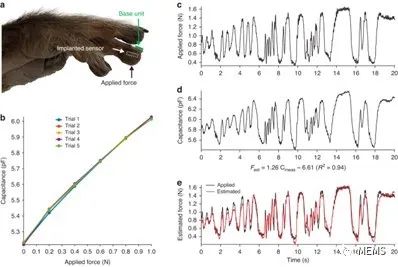
图4 活体外传感器性能
最后,为了评估该传感器体内植入的耐受性,研究人员进行了初步研究。将一个直径3 mm的无功能传感器封装植入猕猴的指尖(如图5)。活体外和活体内实验结果表明,该电容式传感器系统的器件尺寸适合于指尖皮下植入,可准确估计触觉力并用于感知恢复系统。
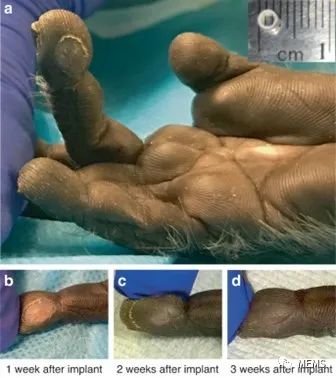
图5 非人类灵长类动物指尖传感器封装植入的活体内初步研究
该传感器的预期应用是瘫痪病患的闭环手部功能再生治疗。本研究所开发的传感器系统只是该预期应用的一部分(如图6)。
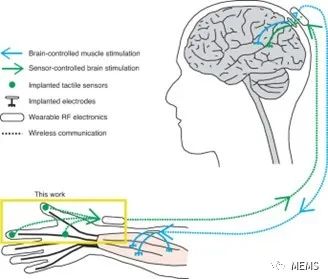
图6 瘫痪病患的闭环手部功能再生治疗示意图
综上所述,研究人员开发了一种用于皮下的植入式触觉压力传感系统。该系统由微加工电容式压力传感器、支持无线供电和数据传输的定制集成电路以及激光熔融密封硅基封装共同构成。该微型装置通过模拟、“台式”评估和灵长类动物手部测试进行了验证。植入指尖的传感器精确测量了施加在皮肤上的力,分辨率为4.3 mN。该新型传感器的输出可以通过微刺激在大脑中编码,以提供触觉反馈。从更广泛的角度,材料、系统设计和制造方法的进步均为植入式传感系统的各类应用建立了新的基础能力。
这项研究获得了美国国立卫生研究院基金(R01NS107550)的资助和支持。
论文链接:
https://doi.org/10.1038/s41378-023-00602-3
延伸阅读:
《触觉技术及市场-2022版》
《可穿戴技术及市场-2023版》
《可穿戴传感器技术及市场-2022版》
《Merit Sensor压力传感器及MEMS芯片分析》