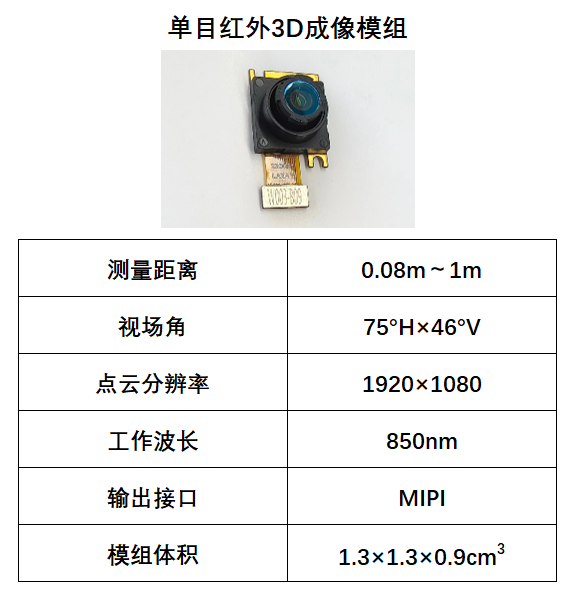
维悟光子近期发布全新单目红外3D成像模组,现可提供下游用户进行测试导入。通过结合微纳光学元件编码和人工智能算法解码,维悟光子单目红外3D成像模组采用单颗摄像头,通过单帧拍摄,可同时获取像素级配准的3D点云和红外图像信息,可被应用于机器人、生物识别等广阔领域。
市场前景与应用
3D视觉是人工智能、通用型机器人感知世界的重要窗口,是数字化、智能化产业转型升级的物质基础。目前3D视觉市场采用的方案主要包括飞行时间法(ToF)、结构光和双目相机。这三种技术路径需要借助激光器、高速高灵敏度探测器或多个相机,才能实现深度信息的获取。相对复杂的硬件系统会带来更高的器件成本、功耗、体积,也会对器件之间的标定和配准有更高的要求,在实际应用场景中存在诸多痛点。
硬件系统的轻量化和降本是3D视觉市场演进的必然趋势。维悟光子通过底层原理的创新,仅利用单目CMOS相机(最简单的成像系统)就可以获取完整的3D信息。本次发布的单目红外3D成像模组,主要面向机器人避障应用,也能适用于生物识别等需要中近距离3D成像的场景。
相比于ToF、结构光和双目相机三种传统技术路径,维悟光子单目3D相机的独特优势有:
更低的器件成本
维悟单目3D相机采用单个CMOS相机获取深度信息,可以节省激光器、高速高灵敏度探测器和多颗摄像头导致的高昂器件成本。
更小的体积和重量
维悟单目3D相机利用单颗摄像头即可获取3D信息,本次发布的mipi接口模组重量仅约3克,可以轻松适应穿戴式设备、无人机等应用场景。
更低的功耗和发热量
维悟单目3D相机不需要主动激光照明,单个CMOS相机的功耗和发热量都较低,能够更好地适应嵌入式设备、穿戴式设备等低功耗应用场景。
更高的点云分辨率
维悟单目3D相机利用成熟的CMOS传感器获取3D信息,能够以较低的成本获取高分辨率的原始图像,且点云数量相较于传感器分辨率没有损失,可以轻松获取稠密点云信息,更好地满足机器人、自动驾驶等领域的应用需求。
天然的3D点云与红外图像配准
维悟单目3D相机通过单帧图像编码记录3D信息,算法解码后的3D点云和红外图像可以天然实现自配准,避免了额外的配准操作带来的算力负担和误差。
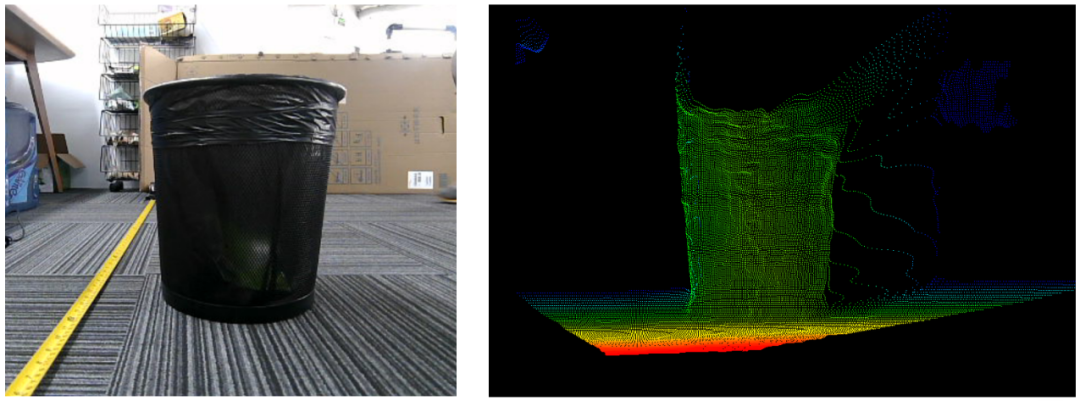
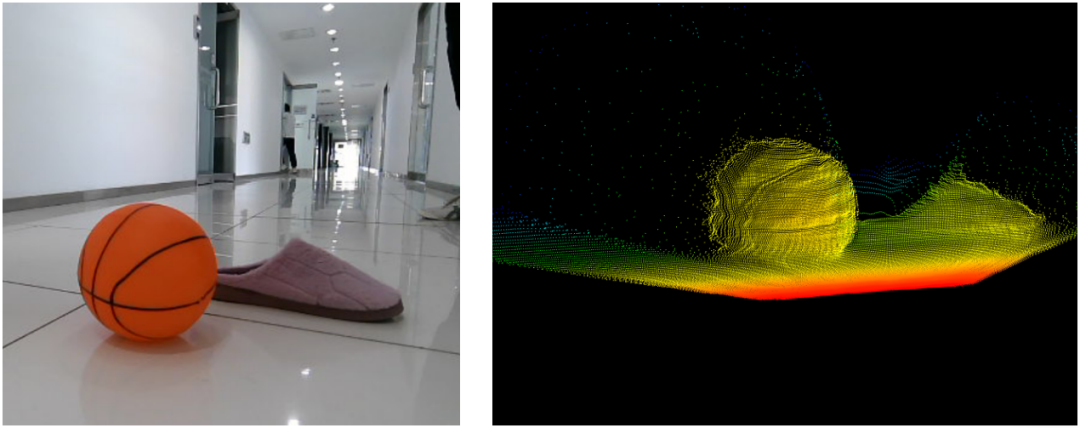
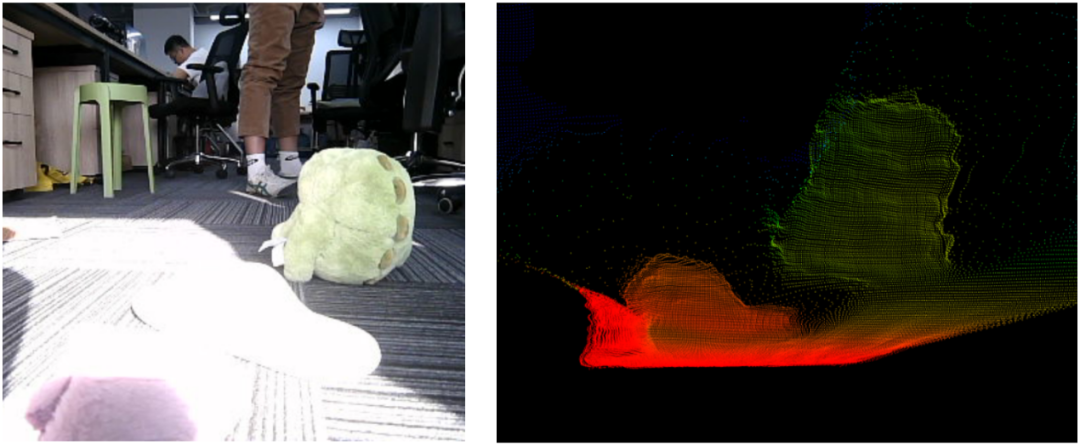
下面是在机器人避障场景的实拍效果演示。
点云分辨率可高达1920×1080(可根据应用需求灵活调整)。维悟单目3D相机能够以更低的成本获取更高分辨率的点云图,让机器人可以“看到”更微小的物体和更准确的轮廓细节,同时可以在强环境光、反光/黑色物体等corner case下稳定输出正确点云,实现更好的识别和避障效果。


黑色金属垃圾桶
反光地面
强环境光
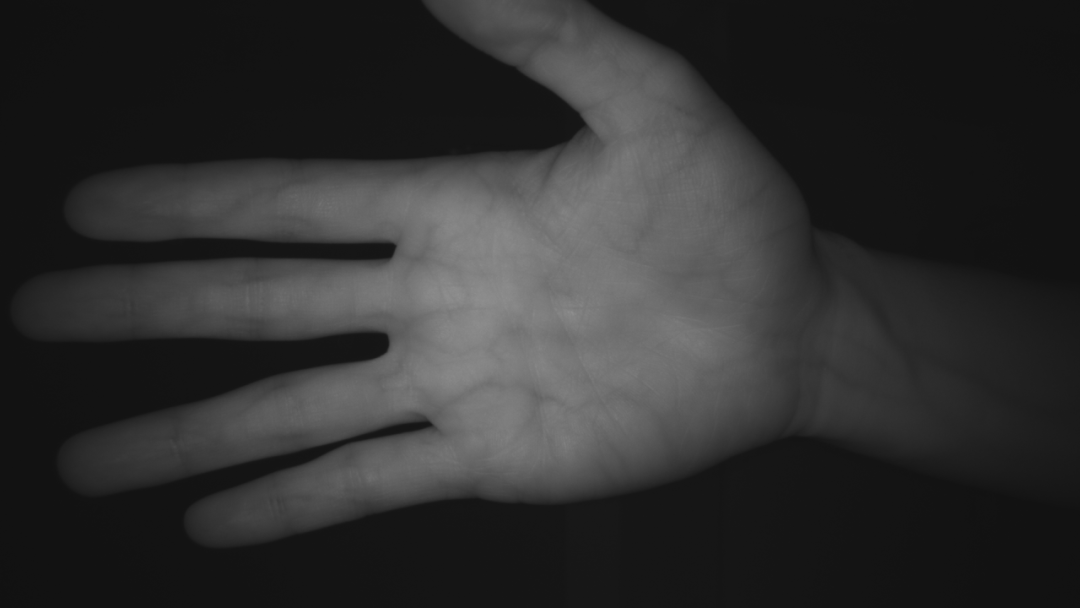
除了3D距离信息,维悟单目3D相机还可以同时输出高分辨率的红外灰度图,例如在生物识别场景中,能够清晰地呈现掌静脉、掌纹等微小细节,为多模态生物识别提供更低成本、更低功耗、更小体积的传感器和解决方案。
维悟单目3D相机作为通用型的3D视觉感知技术,市场应用前景非常广阔。维悟光子团队正在基于领先的光学设计和算法能力,开发更大视场角、更大测量范围的单目红外3D相机和单目RGB-D相机,致力于为机器人、生物识别、手机/电脑、AR/VR、自动驾驶、工业/医疗检测等应用场景提供更优性能和更高性价比的3D视觉感知方案。