#include #include #include #include #include "interrupt.h"#include #include #include #include #include
#include "FreeRTOS.h"#include "task.h"#include "tinatest.h"
extern int amp_init(void);
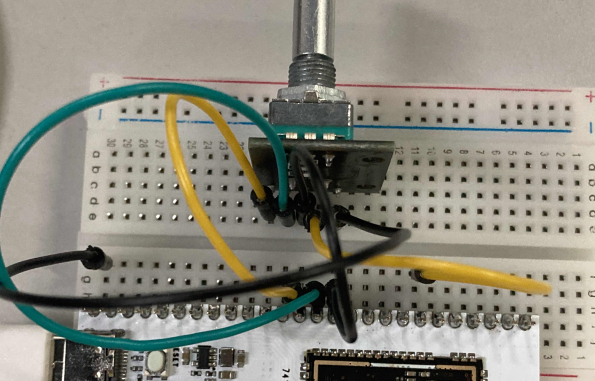
#define ENC_CLK GPIOA(24)#define ENC_DT GPIOA(25)#define ENC_SW GPIOA(29)
int encode_counter = 0;int encode_current_clk;int encode_lask_clk;int current_dir = 0;
static hal_irqreturn_t gpio_irq_encode(void *data){ gpio_data_t clk_value = GPIO_DATA_LOW; gpio_data_t dt_value = GPIO_DATA_LOW; hal_gpio_get_data(ENC_DT, &dt_value); hal_gpio_get_data(ENC_CLK, &clk_value);
encode_current_clk = clk_value; if (encode_current_clk != encode_lask_clk && encode_current_clk == 1){ if (dt_value != encode_current_clk) { encode_counter ++; current_dir = 1; } else { encode_counter --; current_dir = -1; } printf("Direction = %d, Counter = %d\n", current_dir, encode_counter); } encode_lask_clk = encode_current_clk; return 0;}
void cpu0_app_entry(void *param){ int ret = 0;
amp_init();
hal_gpio_set_pull(ENC_CLK, GPIO_PULL_DOWN_DISABLED); hal_gpio_set_direction(ENC_CLK, GPIO_DIRECTION_INPUT); hal_gpio_pinmux_set_function(ENC_CLK, GPIO_MUXSEL_IN);
gpio_data_t clk_data; hal_gpio_get_data(ENC_CLK, &clk_data); encode_lask_clk = clk_data;
hal_gpio_set_pull(ENC_DT, GPIO_PULL_DOWN_DISABLED); hal_gpio_set_direction(ENC_DT, GPIO_DIRECTION_INPUT); hal_gpio_pinmux_set_function(ENC_DT, GPIO_MUXSEL_IN);
uint32_t irq_clk, irq_dt;
ret = hal_gpio_to_irq(ENC_CLK, &irq_clk); if (ret < 0){ printf("gpio to irq error, irq num:%d error num: %d\n", irq_clk, ret); } ret = hal_gpio_irq_request(irq_clk, gpio_irq_encode, IRQ_TYPE_EDGE_BOTH, NULL); if (ret < 0){ printf("request irq error, irq num:%d error num: %d\n", irq_clk, ret); } ret = hal_gpio_irq_enable(irq_clk); if (ret < 0){ printf("request irq error, error num: %d\n", ret); }
ret = hal_gpio_to_irq(ENC_DT, &irq_dt); if (ret < 0){ printf("gpio to irq error, irq num:%d error num: %d\n", irq_dt, ret); } ret = hal_gpio_irq_request(irq_dt, gpio_irq_encode, IRQ_TYPE_EDGE_BOTH, NULL); if (ret < 0){ printf("request irq error, irq num:%d error num: %d\n", irq_dt, ret); } ret = hal_gpio_irq_enable(irq_dt); if (ret < 0){ printf("request irq error, error num: %d\n", ret); }
vTaskDelete(NULL);}