首先附上一张VS Code图一直都喜欢这种,黑色主题感觉高大上。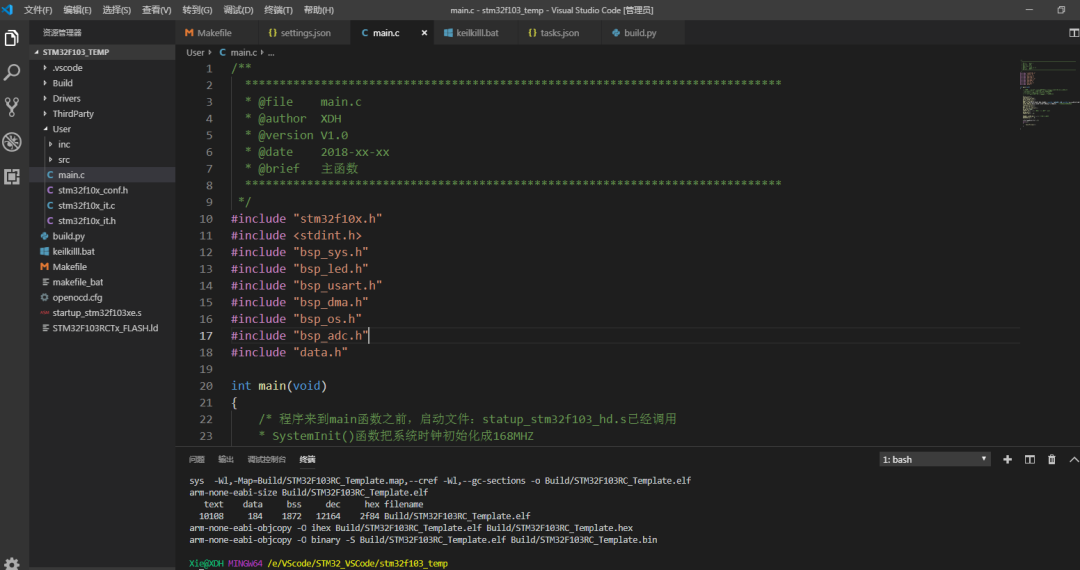
“VS Code下载地址:https://code.visualstudio.com/
”
“LLVM下载地址:http://releases.llvm.org/download.html
”
“Git下载地址:https://gitforwindows.org/
”
gcc-arm\-none-eabi-5\_4-2016q3-20160926-win32.exe (md5)这里是一个2016年的,我目前也是用的这个,好像还有其他的新版的下载,GNU Arm Embedded Toolchain。正常安装后,记得需要将软件的安装目录下的bin文件夹设置进入环境变量PATH中。“arm-none-eabi-gcc下载地址:https://launchpad.net/gcc-arm-embedded/+download
”
“OpenOCD下载地址:http://gnutoolchains.com/arm-eabi/openocd/
”
“STM32CubeMX链接:http://www.stm32cube.com/
”
STM32CubeMX生成的是用HAL库开发的项目,具体怎么配置这里就不介绍了,只介绍与主题有关的部分。
(1)STM32CubeMx芯片包(固件库)下载,注意事项: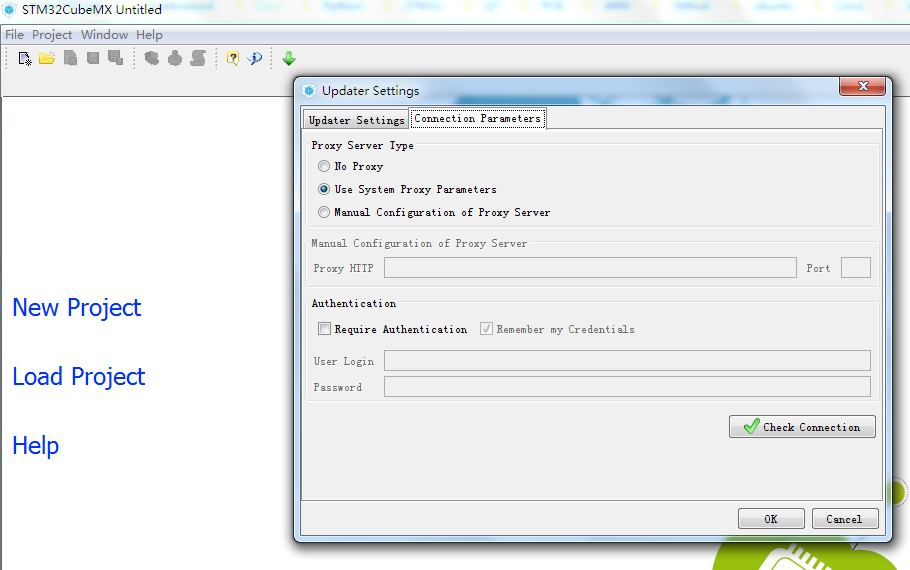
需要选择help -> updater settings ->Connection Parameters设置好网络后,才能下载固件包。
(2)生成工程。选择MakeFile选项。
注意: 4.18.0以下的版本是没有Makefile这个选项的。最后下载一个中间版本,因为5.0以上的版本界面很乱。我选择的是 4.27.0.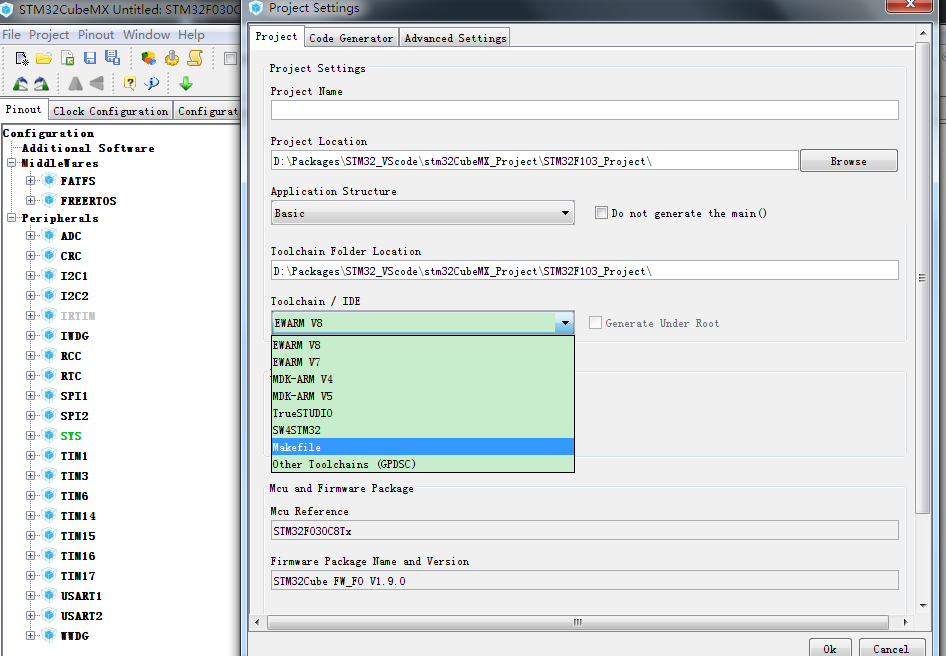
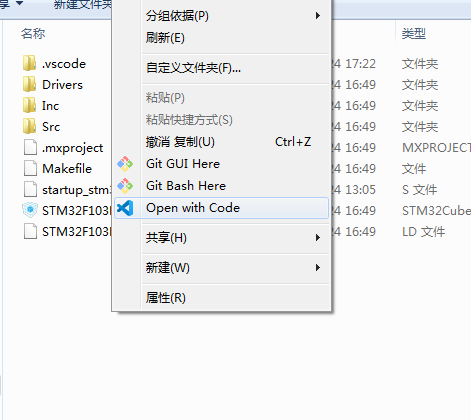
(1)打开工程所在的文件夹。在右键“用VS Code打开工程文件夹”,
你将会看到这样的目录结构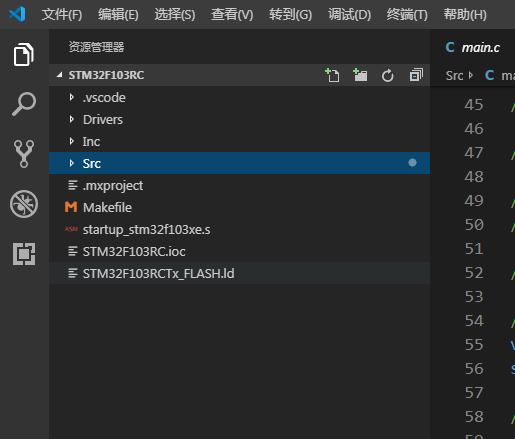
.ioc文件是STM32Cube的工程文件,Inc和Src是供用户修改的源码,Driver里是STM32和ARM CMSIS的库,最好不要修改。
不过,如果你要采用标准库开发的话,就修改为标准库的Driver.
这里将我们上面安装的 Git for Windows 设置为VScode 的内置终端。
文件–首选项–设置,搜索terminal,设置内置终端的Shell为Bash(安装VS Code的时候它会推荐你安装Git,里面有这个Bash)。或者打开 Settings.json添加下面两句。
"terminal.integrated.shell.windows": "D:\\Program Files\\Git\\bin\\bash.exe",
"terminal.external.windowsExec": "D:\\Program Files\\Git\\bin\\bash.exe"
然后按Ctrl+` 就可以打开终端,看到Bash了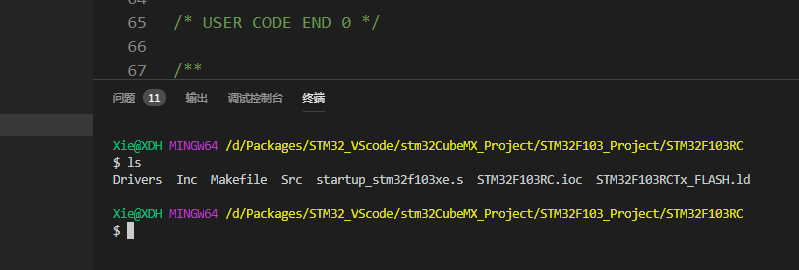
前面我们安装了 LLVM 用它来实现智能补全,与纠错,自然就需要一个路径去寻找这些文件。因此我们需要一个。c\_cpp\_properties.json文件的配置文件。
我们在当前目录的.vscode文件夹下创建c\_cpp\_properties.json配置文件,用来告诉VS Code我们定义的宏与文件的路径。
{
"configurations": [
{
"name": "Win32",
"browse": {
"path": [
"${workspaceFolder}/",
"${workspaceFolder}/Drivers/CMSIS",
"${workspaceFolder}/Drivers/FWlib/inc",
"${workspaceFolder}/Drivers/CMSIS/startup",
"${workspaceFolder}/User/inc",
"${workspaceFolder}/User",
"${workspaceFolder}/ThirdParty/crclib/include"
],
"limitSymbolsToIncludedHeaders": true
},
"includePath": [
"${workspaceFolder}/",
"${workspaceFolder}/",
"${workspaceFolder}/Drivers/CMSIS",
"${workspaceFolder}/Drivers/FWlib/inc",
"${workspaceFolder}/Drivers/CMSIS/startup",
"${workspaceFolder}/User/inc",
"${workspaceFolder}/User",
"${workspaceFolder}/ThirdParty/crclib/include"
],
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE",
"__CC_ARM",
"USE_STDPERIPH_DRIVER",
"STM32F10X_HD"
],
"compilerPath": "C:\\Program Files\\LLVM\\bin\\clang-format.exe",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "clang-x64"
}
],
"version": 4
}
注意:如果提示variable “uint32\_t” is not a type name不是一个type类型。
则需要 添加宏定义\_\_CC\_ARM,如果没有该宏定义,则uint32\_t类型会报错。并且结构体中使用了uint32\_t定义的成员,也会补全不了。
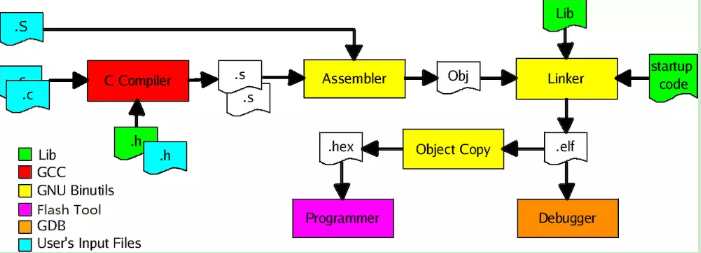
.c文件 经过 arm-none-eabi-gcc 编译成 .o文件.s文件 经过 arm-none-eabi-as 编译成 .o文件.o文件 和 .a文件 经过 arm-none-eabi-ld 链接成 .elf文件.elf文件 经过 arm-none-eabi-objcopy 和 arm-none-eabi-objdump 转换成 hex文件/dis文件arm-none-eabi-gdb 使用 .elf文件 进行debug
注意: 由于我安装了 Qt. Qt中自带了 mingw32-make.exe。我把这个文件复制了一份,重命名为make.exe。并且添加进了环境变量中。因此我可以直接使用 make。
如果你没有 make 的环境。可以下载一个choco包管理器,它类似于linux下的apt,只不过是windows下使用的。然后用choco安装make即可:
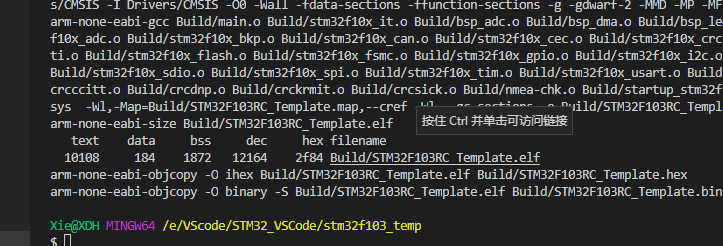
如果改了source code,需要重新编译程序,那就得先执行make clean指令去删除之前build好的所有东西。然后重新执行make指令即可。
要运行openocd这个gdb server,需要配置如下几个参数:
首先我们打开openocd的安装目录,打开share/openocd/scripts,里面有很多提前写好的配置文件。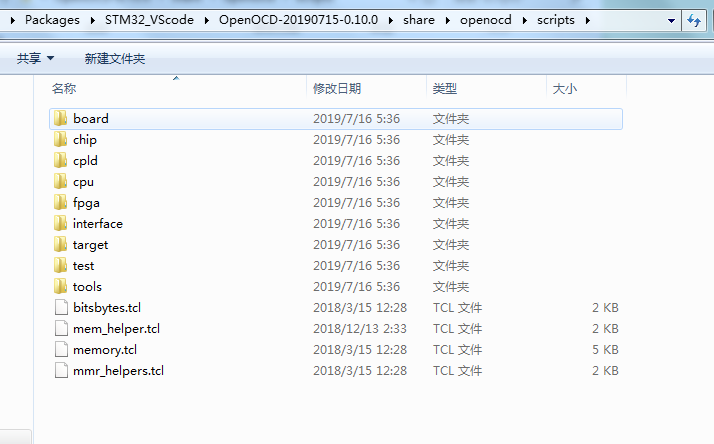
target里存放目标芯片的配置文件,例如stm32f4.cfg
interface里存放仿真器相关的配置文件,例如jlink.cfg,stlink.cfg.
当我们启动openocd时,可以用-f参数来指定一个配置文件。例如:
openocd –f interface/stlink.cfg –f target/stm32f4.cfg
【注】配置仿真器的参数必须在配置目标MCU的参数之前,否则将报错。
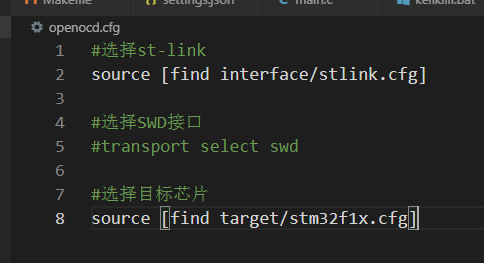
如果我们不带参数启动,openocd就会自动查找当前目录下有没有名为openocd.cfg的文件,并把它作为配置文件来启动。因此,我们就在当前工程下创建一个名为openocd.cfg的文件。
我们选择使用ST-link,SWD接口,目标芯片为stm32f1x。
(PS:这里注释掉了SWD接口,如果采用Jlink 则需要SWD接口)。
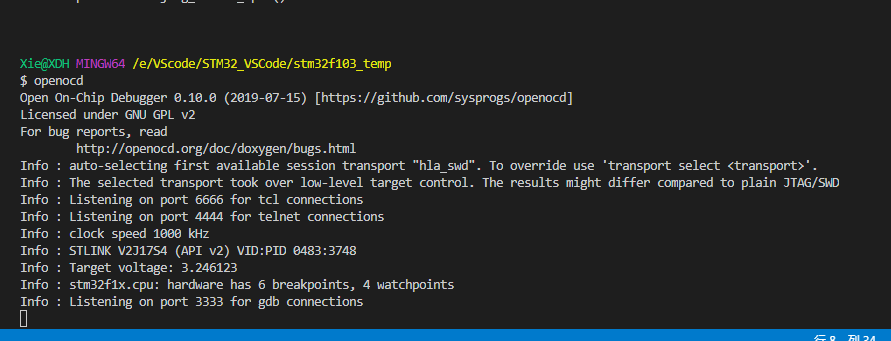
这样,我们连好板子上好电,直接在终端里敲openocd,即可启动。
openocd运行时,这个shell终端就被占用了,我们一会要新开一个终端。
(1)直接启动gdb,参数为编译好的调试文件(.elf)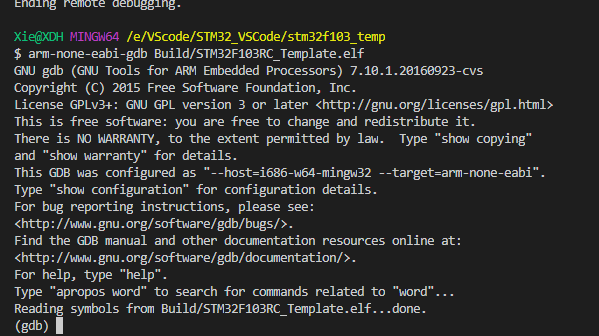
(2)使gdb连接上openocd 前面已经说过openocd留给gdb的TCP/IP端口是3333,因此输入:
target remote localhost:3333
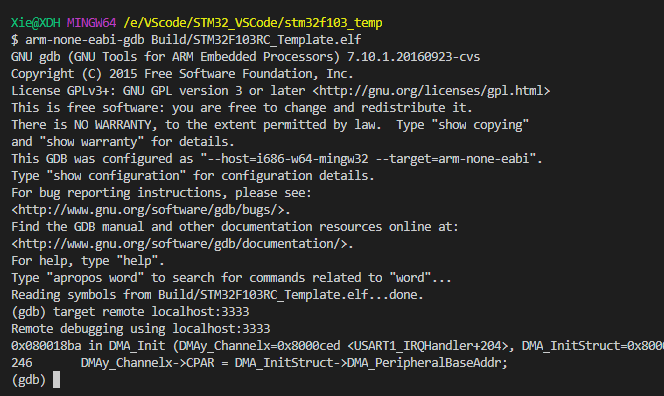
注意,在连接openocd的时候,一定需要先运行 openocd 服务才能通信上,否则一直出现 taget remote 错误。
(3)下载代码.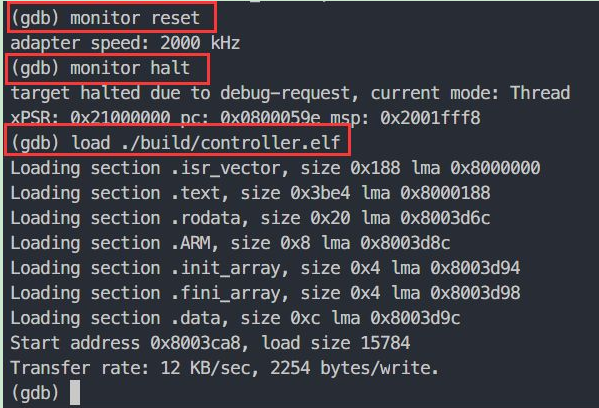
后面就和普通的gdb一样操作了,加断点,单步运行什么的,网上可以搜到很多教程。
【注】 最后记得输入q来退出gdb,以免影响后面的配置。
为了避免每次都在终端输入 make 和 make clean ,与 openocd 。我们可以在VSCode 中,建立一个 Task 来帮我们完成这个任务,
按 F1,选择"配置任务" .vscode目录下就会创建一个tasks.json配置文件.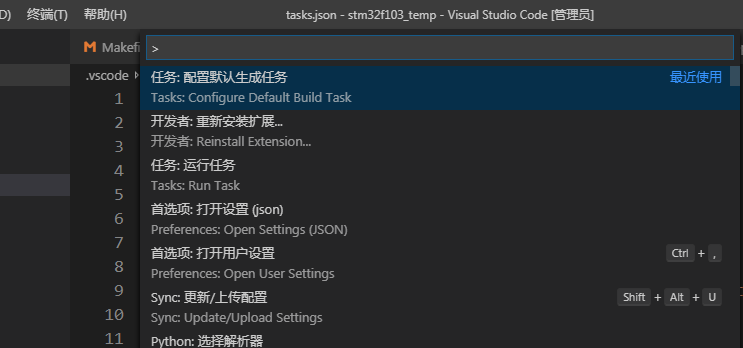
打开 tasks.json ,修改内容如下: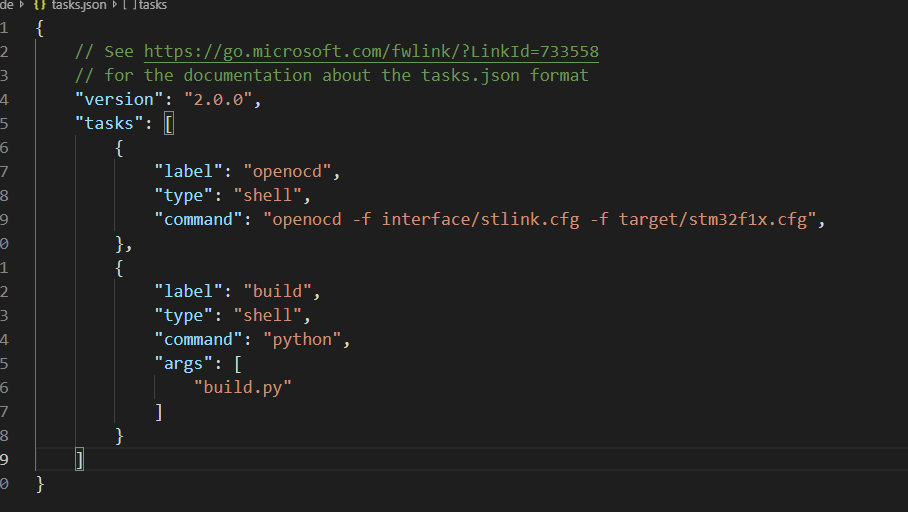
注意上面是两个任务,一个是openocd.用于连接st-link调试。一个是 build 用于编译。
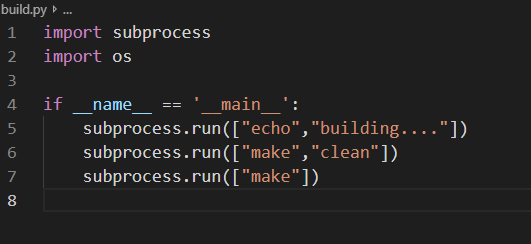
它相当于是创建了一个名为build的任务,任务的内容是在shell里面执行 python build.py这个命令。只是不用我们手动输入而已。
使用VS Code,肯定是图方便,图好看。所以我肯定不会让大家靠敲命令来调试,这样岂不是开倒车,还不如用keil。因此,这里要配置VS Code的调试功能,相当于对gdb的一个图形化吧。
在VS Code内选择debug(就是左边那个虫子图标),选择“添加配置”,类型为GDB。就会在.vscode文件夹下生成launch.json配置文件。
按照下面来配置:
{
"version": "0.2.0",
"configurations": [
{
"name": "ARM Debug",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/Build/STM32F103RC_Template.elf",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"miDebuggerPath": "C:\\Program Files (x86)\\GNU Tools ARM Embedded\\5.4 2016q3\\bin\\arm-none-eabi-gdb.exe",
"targetArchitecture": "arm",
"setupCommands": [
{
"description": "选择调试文件(.elf)到gdb",
"text": "file E:/VScode/STM32_VSCode/stm32f103_temp/Build/STM32F103RC_Template.elf",
"ignoreFailures": false
},
{
"description": "连接GDB Server",
"text": "target remote localhost:3333",
"ignoreFailures": false
},
{
"description": "Reset MCU",
"text": "monitor reset",
"ignoreFailures": false
},
{
"description": "Halt",
"text": "monitor halt",
"ignoreFailures": false
},
{
"description":"下载代码到MCU",
"text": "load" ,
"ignoreFailures": false
}
],
"preLaunchTask": "build",
}
]
}
可以看到,setupCommands里面就是我们之前试用gdb时操作过的流程:连接GDB Server——reset——halt——下载代码。
而preLaunchTask中是我们之前在tasks.json中配置的build任务。它可以让我们每次调试时都先编译一遍。
保存后,随便打几个断点,按下F5,就可以快乐调试了。可以看到功能还是很齐全的。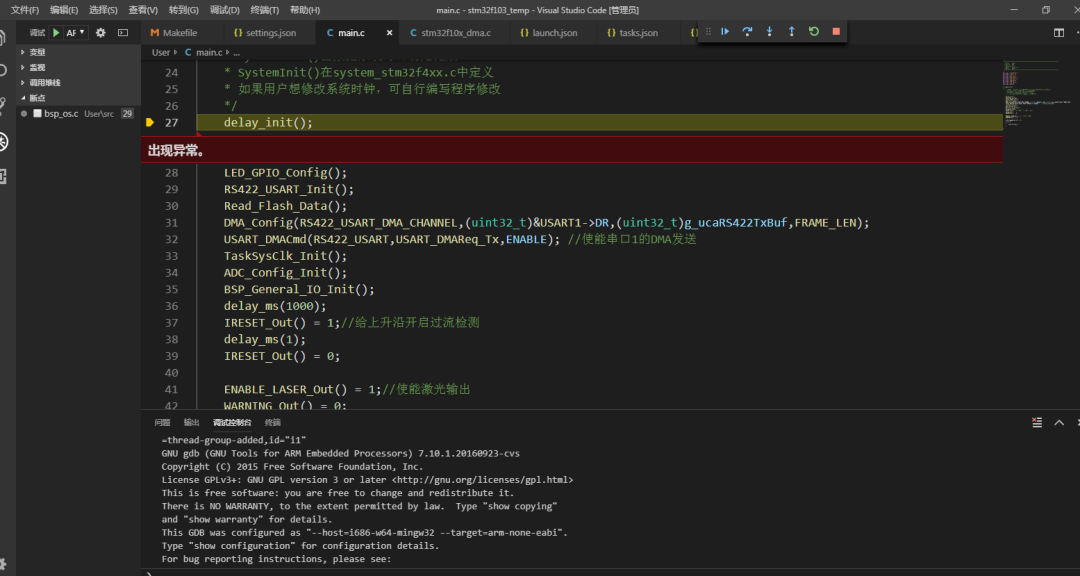
【注意】:在进行调试的时候,需要先 按 F1 --> 任务:运行任务里选择 openocd 任务运行。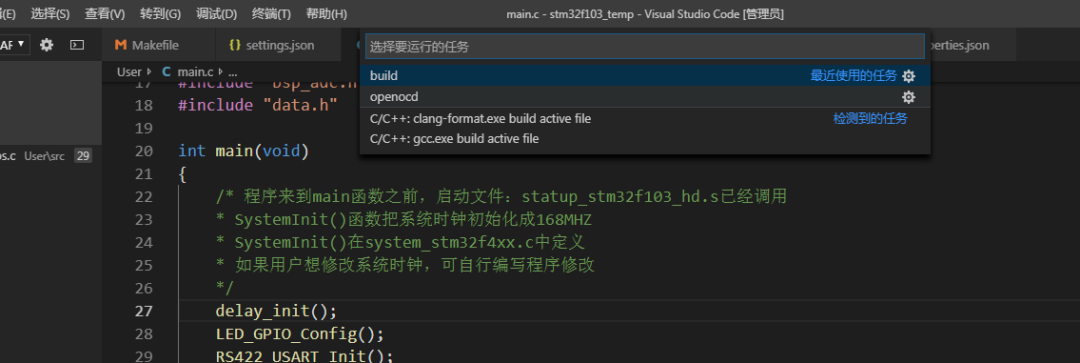
因为调试,需要连接st-link进行调试,而openocd任务是开启st-link的服务。这样客户端才能连接上。
否则会一直出现 target remote localhost:3333 的错误。
【注】 这里有一个问题我一直没有解决,就是setupCommands里,用file选择调试用的elf文件时,必须用文件的绝对路径。我试过用${workspaceFolder}/build/xxx.elf和./build/xxx.elf都不行,都找不到文件,不知道是不是windows路径分割符是”\”导致的。具体的后续再完善。
关注公众号,加星标,回复1024获取学习资料,每天进步一点点。
声明:
本号原创、转载的文章、图片等版权归原作者所有,如有侵权,请联系删除。
 关注、点赞、在看、转发,支持优质内容!
关注、点赞、在看、转发,支持优质内容!