在背景与目标红外辐射量差距不大或背景较为复杂等情况下,传统红外成像技术对目标进行探测与识别的难度较大。而红外偏振探测在采集目标与背景辐射强度的基础上,还获取了多一维度的偏振信息,因此在探测隐藏、伪装和暗弱目标和复杂自然环境中人造目标的探测和识别等领域,有着传统红外探测不可比拟的优势。但同时,偏振装置的加入也增加了成像系统的复杂度与制作成本,且对于远距离成像,在红外成像系统前加入偏振装置对成像系统的探测距离有多大的影响,也有待进一步的研究论证。
据麦姆斯咨询报道,近期,中国科学院上海技术物理研究所、中国科学院红外探测与成像技术重点实验室和中国科学院大学的科研团队在《红外与毫米波学报》期刊上发表了以“考虑探测器非理想性的红外偏振成像系统作用距离分析”为主题的文章。该文章第一作者为谭畅,主要从事红外偏振成像仿真方面的研究工作;通讯作者为王世勇研究员,主要从事红外光电系统技术、红外图像信号处理方面的研究工作。
本文将从分析成像系统最远探测距离的角度出发,对成像系统的探测能力进行评估。综合考虑影响成像系统探测能力的各个因素,参考传统红外成像系统作用距离模型,基于系统的偏振探测能力,建立了红外偏振成像系统的作用距离模型,讨论了偏振装置非理想性对系统探测能力的影响,并设计实验验证了建立模型的可靠性。
目前较为公认的对扩展源目标探测距离进行估算的方法是MRTD法。该方法规定,对于空间频率为f的目标,人眼通过红外成像系统能够观察到该目标需要满足两个条件:①目标经过大气衰减到达红外成像系统时,其与背景的实际表观温差应大于或等于该频率下的成像系统最小可分辨温差MRTD(f)。②目标对系统的张角θT应大于或等于相应观察要求所需要的最小视角。
只需明确红外成像系统的各项基本参数与观测需求,我们就可以计算出系统的噪声等效温差与最小可分辨温差,进而求解出它的最远探测距离。
偏振成像根据成像设备的结构特性可分为分振幅探测、分时探测、分焦平面探测和分孔径探测。其中分时探测具有设计简单容易计算等优点,但只适用于静态场景;分振幅探测可同时探测不同偏振方向的辐射,但存在体积庞大、结构复杂,计算偏振信息对配准要求高等问题;分孔径探测也是同时探测的一种方式,且光学系统相对稳定,但会带来空间分辨率降低的问题;分焦平面偏振探测器具有体积小、结构紧凑、系统集成度高等优势,可同时获取到不同偏振方向的偏振图像,是目前偏振成像领域的研究热点,也是本文的主要研究对象。图1为分焦平面探测系统示意图。
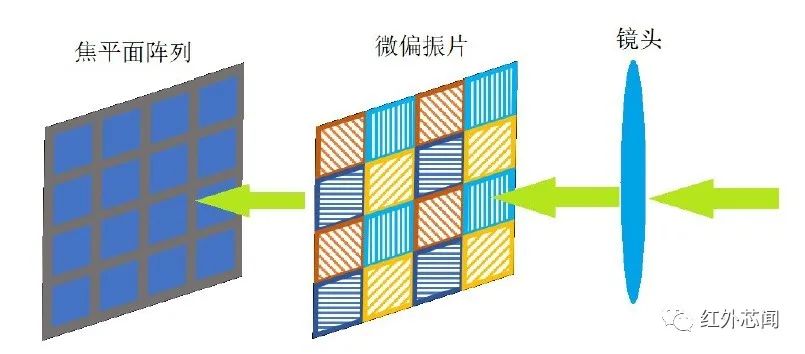
图1 分焦平面探测器系统示意图
本文仿真的分焦平面偏振探测器,是在红外焦平面上集成了一组按一定规律排列的微偏振片,一个像元对应着一个微偏振片,其角度分别为 0°、45°、90°和135°,相邻的2×2个微像元组成一个超像元,可同时获取到四种不同的偏振态。图1为分焦平面探测系统结构示意图。
传统方法认为在红外成像系统前加入偏振装置后,会对系统的噪声等效温差与调制传递函数MTF(f)产生影响,改变系统的最小可分辨温差,进而改变系统的最远探测距离。本文将从偏振装置的偏振探测能力出发,分析成像系统的最小可分辨偏振度差,建立红外偏振成像系统的探测距离模型。
我们首先建立一个探测器偏振响应模型,该模型将探测器视为一个光子计数器,光子被转换为电子并在电容电路中累积,综合考虑探测器井的大小、偏振片消光比、信号电子与背景电子的比率以及入射辐射的偏振特性,通过应用误差传播方法对结果进行处理。从噪声等效偏振度(NeDoLP)的定义出发,NeDoLP是衡量偏振探测器探测能力的指标,即探测器对均匀极化场景成像时产生的标准差。对其进行数学建模,进而分析得到红外偏振成像系统的最远探测距离。
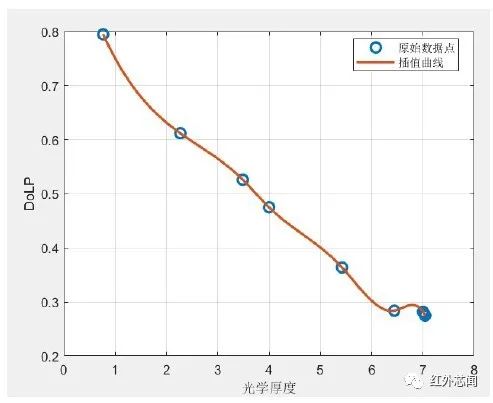
图2 DoLP随光学厚度变化曲线
对于探测器来说,积分时间越长,累积的电荷越多,探测器的信噪比(SNR)就越高,但这种增加是有限度的。随着积分时间的增加,光生载流子有更多的时间被收集,增加信号。然而,同时,暗电流及其相关噪声也会增加。对于给定的探测器,最佳积分时间是在最大化信噪比和最小化暗电流及噪声的不利影响之间取得平衡,为方便分析,我们假设探测器工作在“半井”状态下。
通过以下步骤计算红外偏振成像系统最远作用距离:
a. 根据已知的目标和背景偏振特性以及环境条件,计算在给定距离下,目标与背景之间的偏振度差在传输路径上的衰减。
b. 结合系统的探测器性能参数,确定目标在给定距离下是否可被观察到。如果不能则减小设定的距离。目标被观察到需同时满足衰减后的偏振度差大于或等于系统对应于该频率的最小可分辨偏振度差MRPD,目标对系统的张角θT大于或等于相应观察要求所需要的最小视场角。
c. 逐步增加距离,直到目标与背景之间的偏振度差不再满足观察要求。这个距离即为成像系统最远作用距离。
τp (R)为大气对目标偏振度随探测距离的衰减函数,可根据不同的天气条件,根据已有的测量数据进行插值,计算出不同探测距离下大气对目标偏振度的衰减,图4. 5给出了根据文献中测量数据得到的偏振度随光学厚度增加衰减关系图。
这里给出的横坐标是光学厚度,不同天气条件下,光学厚度对应的实际传播距离与介质的散射和吸收系数有关。
综上,我们建立了传统红外成像系统和考虑了偏振片非理想性的红外偏振成像系统的作用距离模型,下面我们将对模型的可靠性进行验证,分析讨论探测器各参数对成像系统探测能力的影响。
由噪声等效偏振度的定义可知,其数值越小,代表偏振探测器的性能越优秀。下面我们对影响红外偏振成像系统探测性能的各因素进行讨论,并设计实验验证本文建立模型的正确性。
偏振片消光比
消光比是衡量偏振片性能的重要参数,市售的大面积偏振片的消光比可以超过200甚至更多。对其他参数按经验进行赋值,从图3可以看到,对于给定设计参数的探测器,偏振片消光比超过20后,随着偏振片消光比的增加,探测器性能上的提升微乎其微。对于分焦平面探测器,为实现更高的消光比,不可避免地要牺牲探测器整体辐射通量。由于辐射通量降低而导致的信噪比损失可能远远超过消光比增加所获得的收益。这一结果同样可以对科研人员研制偏振片提供启发,对需要追求高消光比的偏振片来说,增大透光轴方向的最大透射率要比降低最小透射率更有益于成像系统的性能。
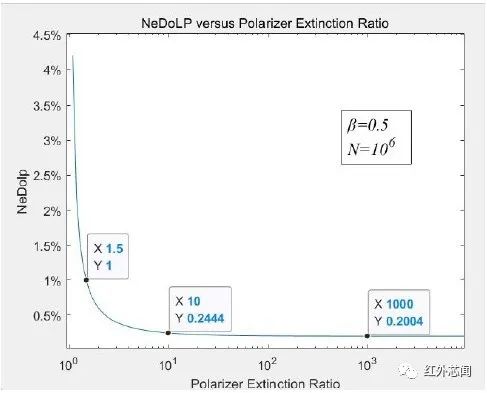
图3 偏振片消光比与探测器噪声等效偏振度关系图
探测器井容量
红外探测器的井容量是指探测器像素在饱和之前能够累积的电荷数量的最大值。井容量是衡量红外探测器性能的一个关键参数,井容量通常以电子数(e-)表示。较大的井容量意味着探测器可以在饱和之前存储更多的电荷,从而能够在更大的亮度范围内准确检测信号。这对于在具有广泛亮度变化的场景中捕获清晰图像至关重要。从图4可以看出,增大探测器井的容量,同样能很好的提高成像系统的偏振探测能力。
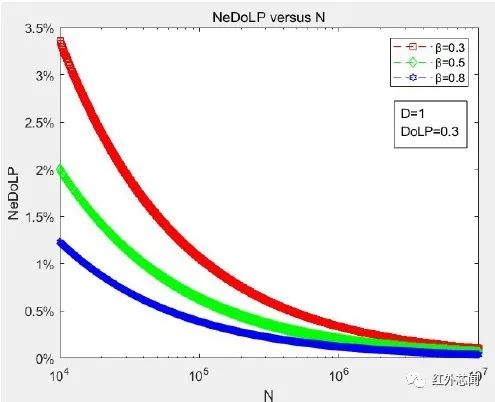
图4 探测器井容量与探测器噪声等效偏振度关系图
然而,井容量的增加可能会导致像素尺寸增大或探测器面积减小,这可能对系统的整体性能产生负面影响。因此,在设计红外探测器时,需要权衡井容量、像素尺寸和其他性能参数,以实现最佳性能。
目标偏振度
虽然推导出的噪声等效偏振度公式包含目标偏振度这一参量,但目标的偏振度本身对探测器的噪声等效偏振度没有直接影响。NeDolp 是一个衡量探测器性能的参数,它主要受探测器内部噪声、电子学和其他系统组件的影响。然而,目标的偏振度会影响探测器接收到的信号强度,从而影响信噪比(SNR)。从图5也可以看出,探测器的NeDolp受目标的偏振度影响不大。
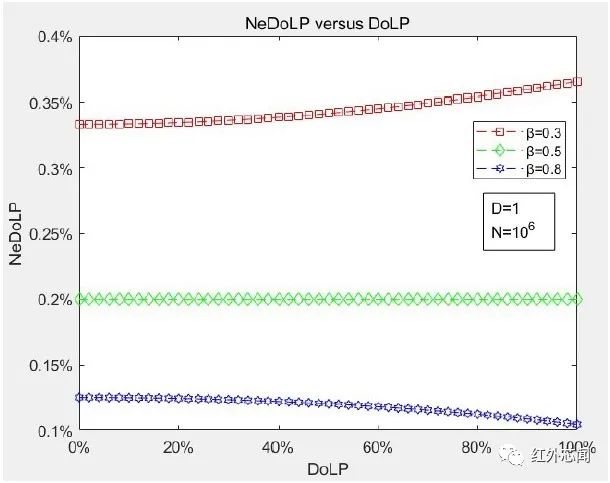
图5 目标偏振度与探测器噪声等效偏振度关系图
读取噪声与产生复合噪声比值
读取噪声主要来自于探测器的读出电路、放大器和其他电子元件。它通常在整个光强范围内保持相对恒定。产生复合噪声是由光子的随机到达和电荷生成引起的,与光子数成正比。在低光强下,产生复合噪声通常较小;而在高光强下,它会逐渐变大。通过计算读取噪声和产生复合噪声的比值,可以确定系统的性能瓶颈。如果读取噪声远大于产生复合噪声,这意味着系统在低光强下受到读取噪声的限制。在这种情况下,优化读出电路和放大器等元件可能会带来性能提升。如果产生复合噪声远大于读取噪声,这意味着系统在高光强下受到产生复合噪声的限制。在这种情况下,提高信号处理和光子探测效率可能有助于改善性能。从图6可以看出,降低读取噪声与产生复合噪声比值可以有效提升系统偏振探测能力。
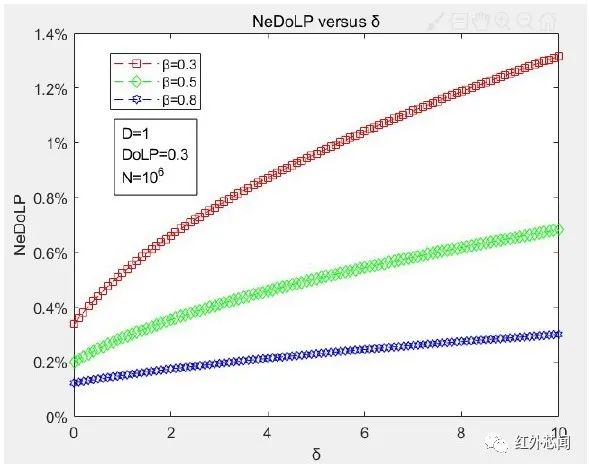
图6 δ与探测器噪声等效偏振度关系图
信号电子比例
综合图4~6可以看出,提升β的数值可有效提高探测器的偏振探测能力,由β的定义可知,对于确定井容量的探测器,β的取值主要取决于探测器的各种噪声与积分时间,降低探测器的工作温度、优化探测器结构、减少表面和界面缺陷等途径都可以降低探测器的噪声,调节合适的积分时间也有助于探测系统的性能提升。
实验验证
根据噪声等效偏振度的定义,利用面源黑体与红外可控部分偏振透射式辐射源创建一组均匀极化场景。如下图7所示,黑体发出的红外辐射,经过两块硅片,发生四次折射,产生了偏振效应,通过调节硅片的角度,即可产生不同线偏振度的红外辐射。以5°为间隔,将面源黑体平面与硅片间的夹角调为10°~40°共七组。每组将面源黑体设置为40℃和70℃两个温度,用国产自主研制的红外分焦平面偏振探测器采取不少于128帧图像并取平均,然后将每组两个温度下相同角度获得的图像作差,以减少实验装置自发辐射和反射辐射对测量结果的干扰,差值图像就是透射部分的红外偏振辐射。对差值图像进行校正和去噪后,即可按公式计算出探测器对均匀极化场景产生的偏振度图像。计算出红外辐射的线偏振度,为减小测量误差,仅取图像中心区域的像元进行分析。该区域像元的标准差就是该成像系统的噪声等效偏振度(NeDoLP)。探测器具体参数如表1所示。
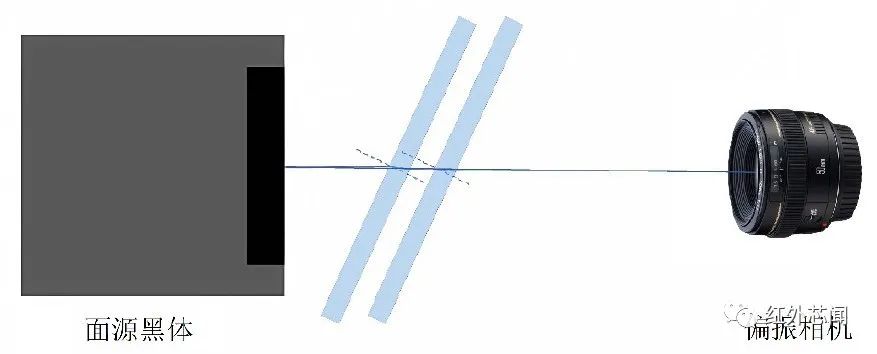
图7 实验示意图

利用本文建立的探测器仿真模型计算出硅片的线偏振度仿真值,公式19计算出硅片线偏振度的理论值,与实验的测量值进行对比,图8展示了三组数据的变化曲线,从图中可以看出,三组数据存在一定偏差,这可能与硅片调节角度误差、面源黑体稳定性、干涉效应、硅片摆放是否平行等因素有关,但在误差允许的范围内,实验验证了偏振探测系统的性能,也证明了本文建立仿真模型的可靠性。NeDoLP测量结果如表2所示。
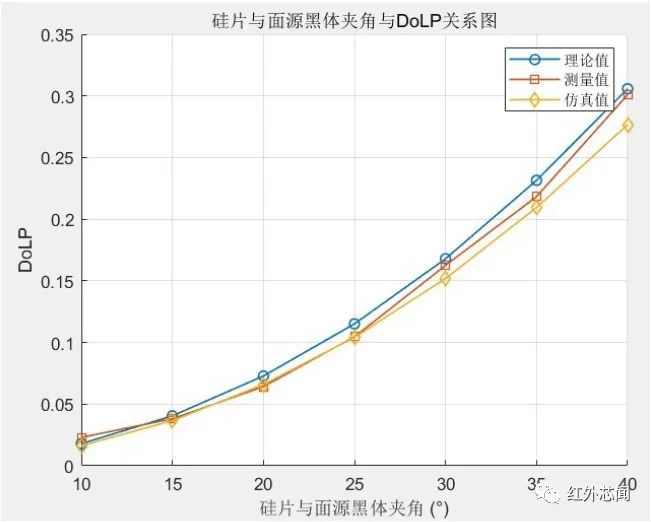
图8 线偏振度理论值、测量值与本文模型仿真值曲线图
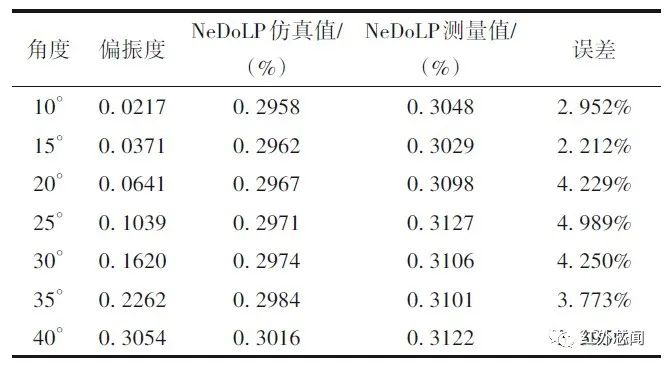
从上表可以看到NeDoLP的测量值与仿真值的差值基本能控制在5%以内,实验结果再次印证了本文设计的模型的可靠性。
实例计算
应用建立的模型对高2.3m,宽2.7m,温度47℃,发射率为1的目标的最远探测距离进行预测,目标差分温度6℃;背景温度27℃;发射率1;目标偏振度30%,背景偏振度1%,使用3.2节中样机的探测器参数,最后,采用文献中介绍的“等效衰减系数-距离”关系的快速逼近法对红外探测系统最远作用距离R进行求解,得到表3的结果。
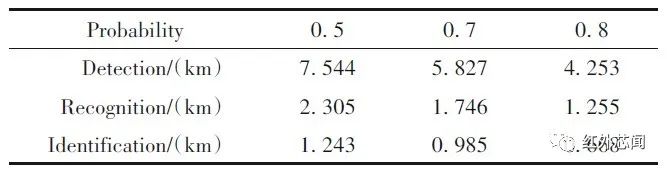
根据红外探测系统最远探测距离,利用本文第二节提出的方法,得到不同探测概率下红外偏振成像系统最远作用距离结果如表4所示。
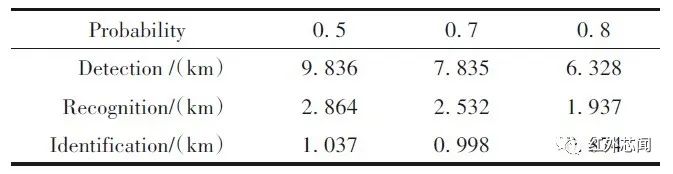
所选例子为目标与背景偏振度差异大于其温差,所以在这种探测场景下红外偏振成像系统的探测能力要优于红外成像系统。探测器的参数不同,探测场景与目标的变化都会对模型的结果产生影响,但本文提供的成像系统作用距离模型可为实际探测中不同应用场景下的成像系统选择提供参考。
针对不同的探测场景,红外成像系统与红外偏振成像系统在最远探测距离方面哪个更有优势并没有定论,探测目标的大小,背景与目标的温差与偏振度差,大气透过率,具体探测器的参数等因素都会对成像系统的最远探测距离产生影响。经实验验证,本文所建立的非理想红外偏振成像系统的响应模型是可靠的,可以用于估算成像系统的最远作用距离,针对不同的探测场景,读者可通过实验确定探测器的具体性能参数,利用仿真软件或实验测量的方式获取探测目标的温度与偏振信息,明确探测环境的具体大气参数,利用模型对红外成像系统与偏振成像系统的最远作用距离进行预估,选择更具优势的成像系统。
这项研究获得上海市现场物证重点实验室基金(No. 2017xcwzk08)和上海技术物理研究所创新基金(No. CX-267)的资助和支持。
http://journal.sitp.ac.cn/hwyhmb/hwyhmbcn/article/abstract/2023041
《光谱成像市场和趋势-2022版》