基于探索者搭建的模块化四轴飞行器研究平台,采用独特的设计方式,可实现在室内完成对四轴飞行器、无人机等运动控制的原理研究,以及学习飞行控制的原理知识。
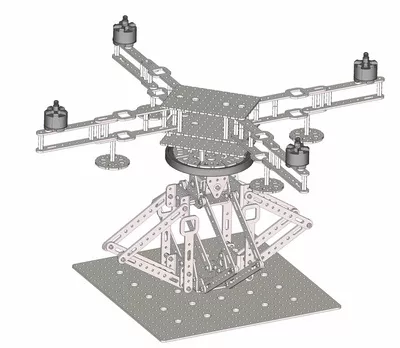
请按照下图进行机架的组装。
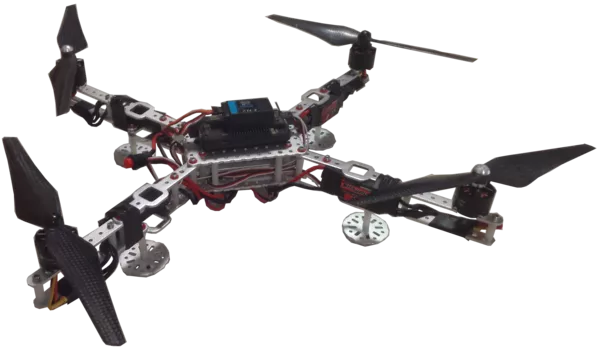
整体图


请解压文末资料中的 /软件/MissionPlanner-1.3.28.zip。
请参考文末资料中的 /模块手册/APM2.8飞控.pdf进行飞行器的设置。
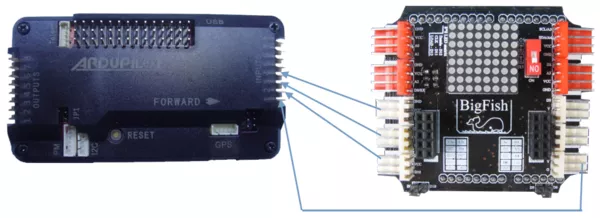
3. 硬件连接
请按照以下连接方式进行控制系统的组装。
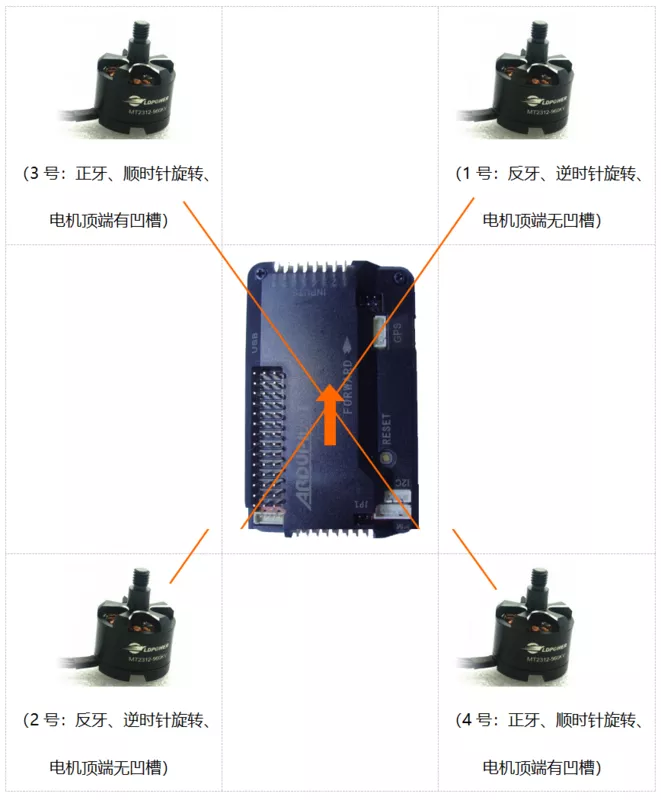
3.1无刷电机与飞控的方向

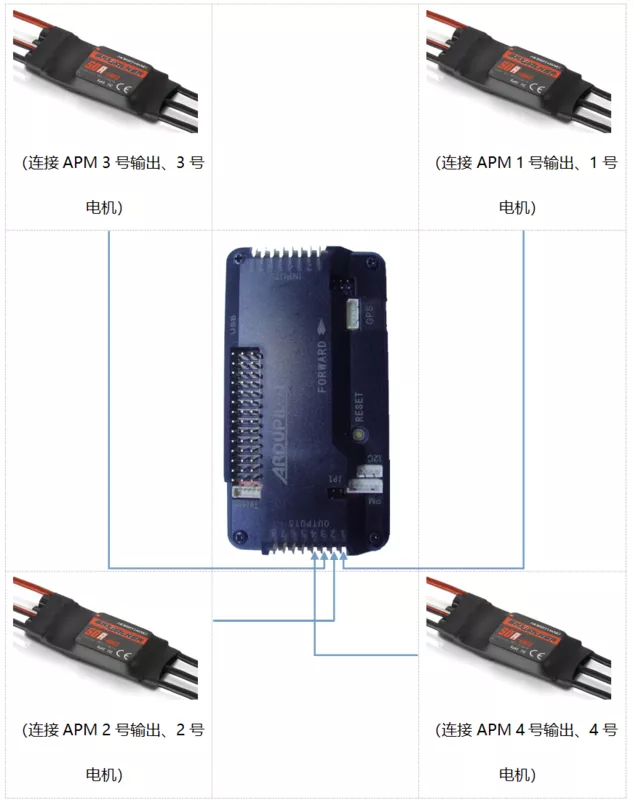
备注:电调的信号线为黑红白一体的线,其中白线为信号线,接在飞控上时信号线为飞控有凹槽的一段端,垂直连接。
3.4飞控与接收机的连接
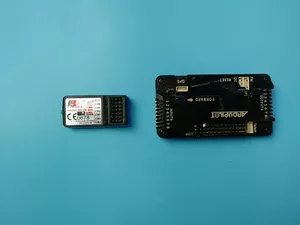
具体的连接方式如下:
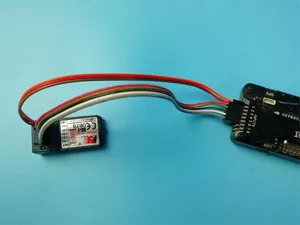
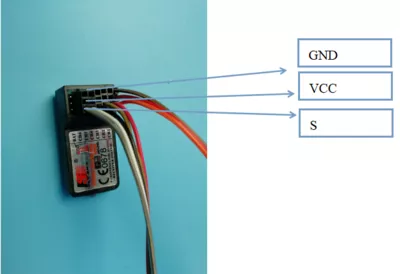
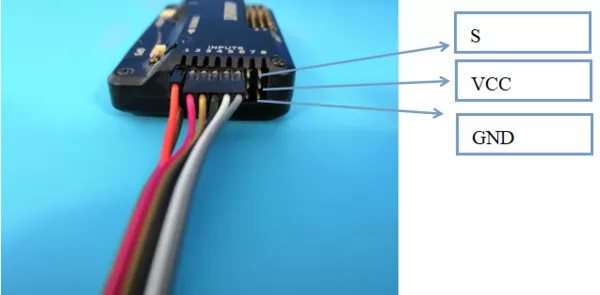
接线方式:

注意:除CH1通道外,其它只接信号线即可(信号线、VCC、GND位置参考下图)。
3.5桨叶与无刷电机的连接
1、2号电机为反牙电机,顶端不带凹槽,安装黑色浆,螺旋桨安装时握住电机机体,逆时针旋转螺旋桨拧紧。
3、4号电机为正牙电机,顶端带凹槽,安装银色桨,螺旋桨安装时握住电机机体,顺时针旋转螺旋桨拧紧。