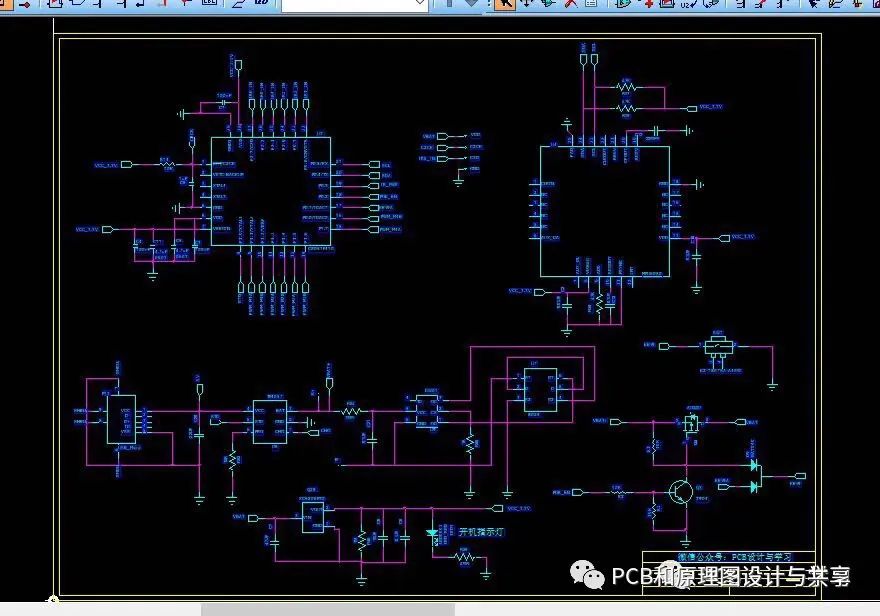
从零开始设计一种智能避障手势感应四轴飞行器小玩具的原理图,通过分析其功能和硬件要求,从而完成陀罗仪、避障电路、电机驱动、电池和充电电路、开机方式以及单片机的选型等设计。该设计旨在锻炼个人的设计能力,并通过自身理解来实现功能实现,从而展示自身的潜力。
在没有实物参考和资料参考的情况下,我们可以尝试通过自己的理解来设计一款智能避障手势感应四轴飞行器小玩具的原理图。通过严格要求自己,可以激发出无限的潜力。本文将介绍该四轴飞行器的功能分析以及所需的硬件要求,最后设计完成完整的原理图。
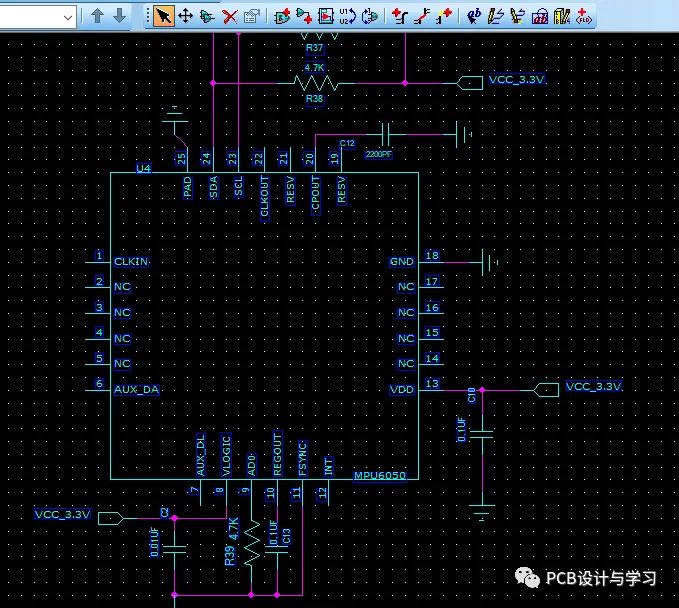
一、悬停功能方案选择
在设计的过程中,我们首先考虑了悬停功能的实现方案。为了实现这一功能,我们选择了以前使用过的三轴加速度计和三轴陀螺仪姿态传感器。这样的选择能够提供准确的姿态感知和飞行控制。通过参考电路设计,我们可以实现可靠的悬停功能。
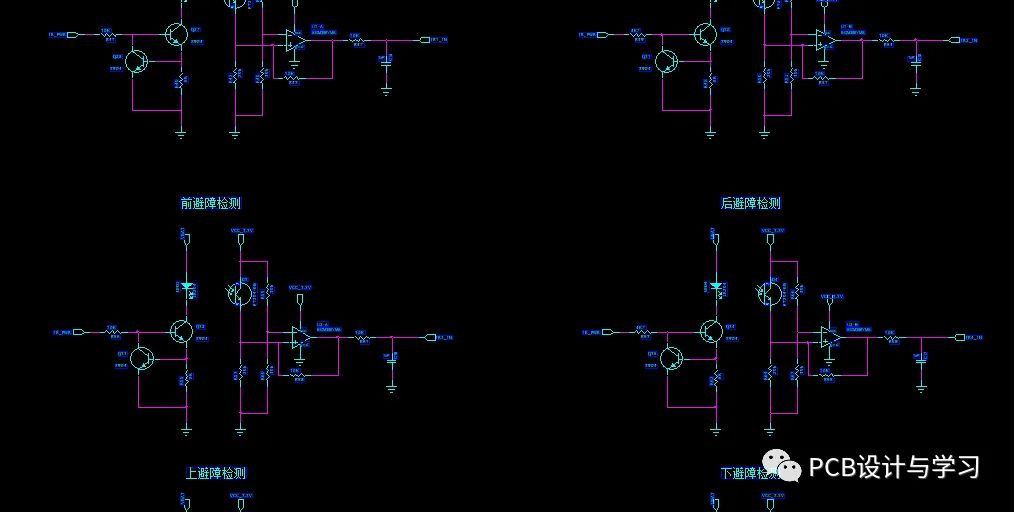
二、避障功能电路设计
该四轴飞行器玩具除了能够在室外飞行,还能感应手势并实现避障功能。基于成本的考虑,我们采用了红外对管作为避障的传感器。为了在室内自由地飞行,我们将使用6组红外对管,分别装配在飞行器的前后左右上下。通过设计相应的电路,我们可以实现全方位的避障功能。
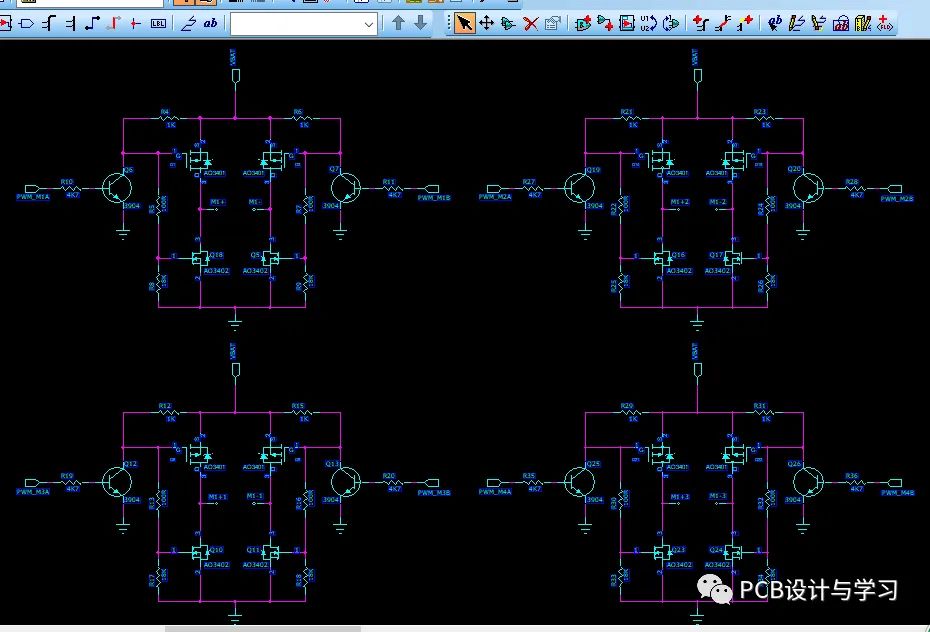
三、电机驱动设计
为了实现四个电机的正反转控制,我们选择了使用分立器件搭建H桥驱动电路。这样的设计可以满足控制要求,并且在成本方面更加合理。
四、电池的选择
由于该小飞行器对自身重量有严格要求,我们选择了尺寸小、重量轻的100mAh锂电池作为电源。
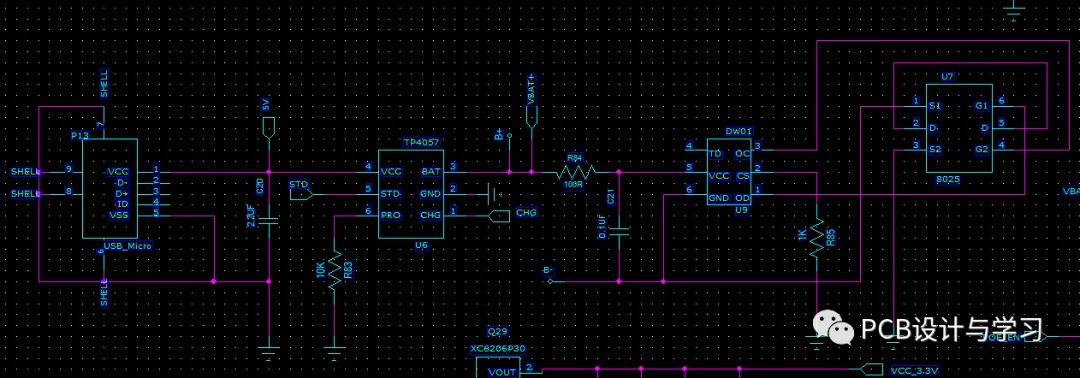
五、充电电路的设计
为了实现对锂电池的充电,我们选用了100mA充电电路,通过MICRO USB接口进行充电。此外,为了保护电池,在设计过程中我们还加入了电池的保护电路。
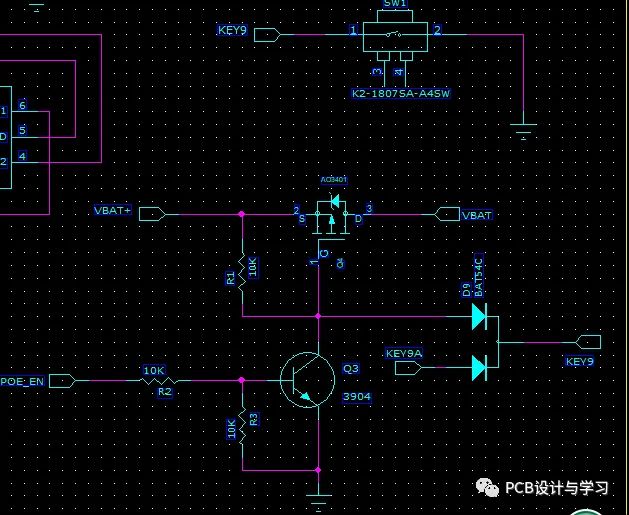
六、开机方式设计
我们选择了轻触按键,长按开关机的方式来控制飞行器的开机和关机。这样的设计简单实用,并且符合用户习惯。
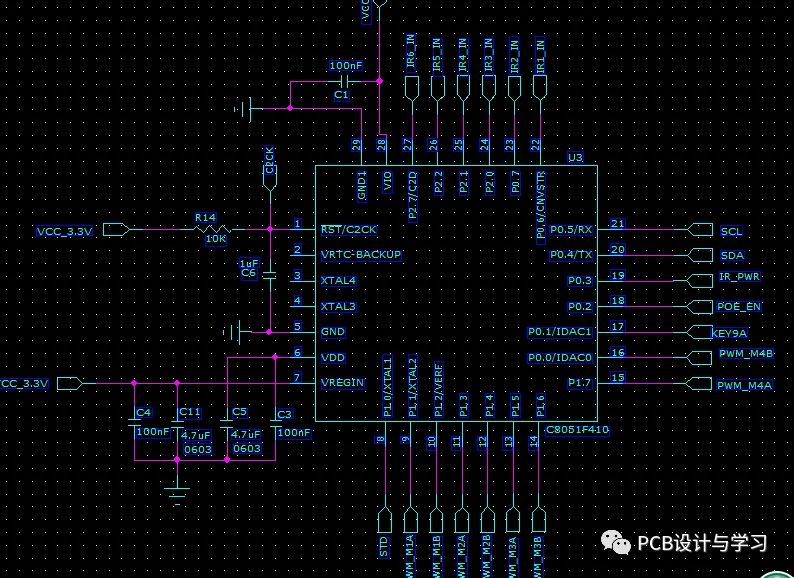
七、单片机选型
由于整个电路需要使用较多的IO口,我们选择了一款IO口数量较多的单片机来作为控制核心。该单片机能够满足电机驱动、避障电路、陀罗仪、充电检测等多个功能的要求。
通过以上分析,我们完成了智能避障四轴飞行器原理图的设计。这个设计不仅考虑了功能的实现,还兼顾了成本和重量等因素。对于对这个设计感兴趣的朋友,可通过公众号主页回复"智能避障四轴飞行器原理图"获取下载链接。这样的设计既可以锻炼个人的设计能力,又能够通过自身理解来实现功能的实现,展现出个人的潜力。