--关注、星标、回复“智驾圈子”--
↓↓查看:「智驾最前沿」智驾圈子超百份资料目录↓↓
随着汽车智能化、网联化技术不断发展,传统电子电气架构已难以满足面向未来的车路云网一体化发展新需求。本文中聚焦面向未来的智能网联汽车多域电子电气架构,分别从总体设计、硬件系统、通信系统和软件系统4个方面对现有技术进行了详细的综述并对我国电子电气架构的发展进行展望。本文可对汽车电子电气架构技术研究提供重要的参考价值。欢迎关注「智驾最前沿」微信视频号
随着车辆电气化与智能化的长足发展,汽车工业与移动计算、泛在车联、人工智能等ICT 技术深度融合加速,引发了汽车数字化以及软件定义汽车的新浪潮,孕育了“人-车-路-云-网”一体化运行的新一代智能交通系统,有望极大地提升未来交通系统的运力、能效、安全与驾乘体验[1] 。智能网联汽车(intelligent connected vehicle, ICV)已经成为“人-车-路-云-网”一体化系统中汽车产业升级的必然趋势[2] 。ICV 配备了智能感知系统、智能决策控制系统和智能执行系统,与通信网络、人工智能紧密结合,可实现车辆与多领域(车辆、道路、行人、云等)间的信息交互[3] 。ICV 是汽车由传统运输工具向新一代智能终端的转型的物理载体,对汽车电子电气架构(electrical/electronic architecture,后文简称E/E 架构)的基础设计理论和方法提出了新挑战和新要求,催生了E/E 架构技术的新变革。E/E 架构技术作为ICV 系统设计技术之一,对整车软硬件系统集成、功能实现、开发成本以及车辆综合性能有着决定性的影响[4] 。汽车E/E 架构定义为实现整车功能的汽车电子电气组件的组织结构及其软硬件系统,强调各组件之间以及组件与整车环境之间的相互作用和相互依赖关系,以及指导设计和演变的原则。作为ICV 系统本身及功能构成的顶层设计,现有E/E 架构存在何种不足、未来E/E架构应该如何设计才能满足ICV的未来复杂需求和适应新技术趋势是汽车领域关注的重要问题。目前已有众多学者对此展开了深入研究。Jiang 等[5] 研究了E/E 架构的演变趋势,讨论了电气化、自动驾驶和连接功能对E/E 架构的影响,提出了E/E 架构设计的指导方针、内容和实施过程。Navale 等[6] 讨论了自动驾驶和网络安全等功能日益增加导致车载通信网络、供电系统、硬件连接、安全方面的E/E架构变革以及现有E/E架构瓶颈,主要是通信带宽和V2X 通信能力、不同需求灵活配置性、算力可扩展性及可行性。Bandur等[7] 分析了传统分布式架构的优缺点,从汽车功能的可扩展性、架构通信性能、成本和功能安全等方面论述了E/E 架构由分布式向集中式演进的趋势。Zeng等[8] 对车载通信网络架构展开研究,从系统成本、传输能力和容错性等对LIN、CAN、FlexRay、Ethernet 和MOST 多种车载通信协议对比分析。Zhu 等[9] 基于需求驱动分析了E/E 架构的演变过程,展示了当前先进的E/E 架构,包括网络拓扑、通信标准、操作系统以及仿真平台,提出基于软件定义的分层可重构定制的E/E 架构的趋势。崔明阳等[10] 提出ICV的架构要从新概念车辆平台架构和与车路云融合系统架构多维考虑,不仅要优化自车架构功能,更要满足架构共用、信息融合与控制协同的要求。总的来说,电气化、智能化、网联化技术快速发展与应用催生的汽车功能多元化、定制化需求是E/E 架构升级的源动力,也是当前架构设计面临的新挑战。综合来看,ICV的E/E架构设计技术亟须突破以下挑战:(1)在总体架构设计上,现有基于经验的设计流程难以支撑全开发周期高精度设计,构建基于模型的设计理论和评估体系,以多元化需求为导向,强化架构软硬综合匹配、功能安全、数据安全、信息安全设计。(2)在硬件系统设计上,结合车辆功能设计ICV 专用智能控制器,实现提算力、降能耗;优化电源系统与线束系统设计理念,降低整车成本与质量。(3)在通信系统设计上,现有通信机制难以适应暴涨的数据传输需求,亟须设计高带宽、强实时、低时延抖动的车载通信机制,强化通信网络的可配置性和多通信协议的可扩展性。(4)在软件系统设计上,软件功能的差异化和快速迭代将成为核心竞争力。软件定义汽车(software defined vehicle, SDV)与基于服务(service-oriented architecture, SOA)的软件设计理念成为系统软件设计的基石,设计可解耦、可升级、易配置、高安全、个性化的软件将成为整车企业角力的主战场。上述挑战形成了E/E 架构技术发展的重大需求牵引,如何引导E/E 架构技术进一步发展迭代是ICV 架构设计亟须解决的重大问题。本文在充分综合大量国内外文献的基础上,从总体架构设计、硬件系统、通信系统及软件系统4 个角度对ICV 多域E/E 架构研究的关键技术进行研究分析,并展望未来发展趋势。
按照算力集中程度,本文将E/E 架构划分为分布式架构、域集中式架构和中央集中式架构,各架构特点论述如下。分布式E/E 架构主要根据汽车功能划分为不同的控制器网段。每个电子控制单元(electronic control unit,ECU)的设计都基于特定功能需求展开的,ECU之间主要通过CAN 总线传递彼此间的信息,以此来实现整车的功能,典型的硬件拓扑如图1 所示。在该架构中,单一ECU 只负责单一功能的实现,一辆车往往分布着上百个ECU,各个ECU 不但直接驱动执行器和传感器,而且承担了业务功能的复杂控制逻辑。该架构的软硬件紧密耦合,每扩展一个功能,很大程度上就需要增加相应的ECU 和通信信号。由于ECU 扩展计算能力不足、通信带宽较受限、功能升级困难等问题,制约架构升级、影响汽车安全性能的瓶颈效应明显。此外,随着ECU 部署增多,车内的线束也会随之延长,不仅增加了整车质量和成本,同时也给整车布置及装配带来了很大的困扰。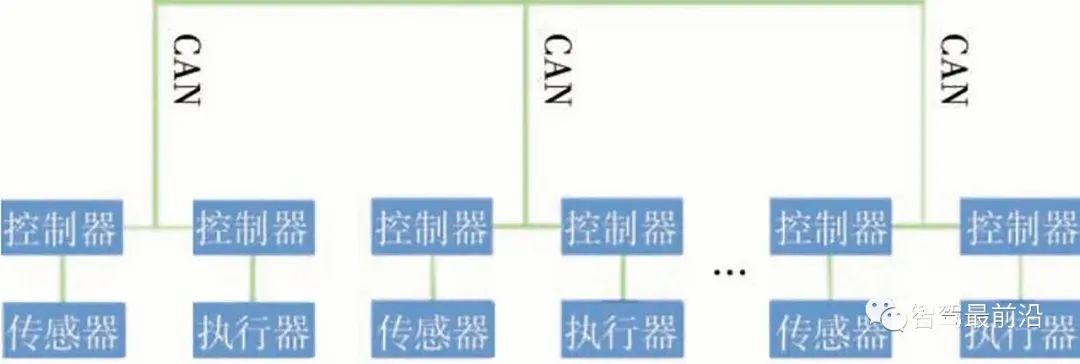
随着高算力芯片低成本大带宽的车载以太网的应用,域集中架构的出现逐渐摆脱了分布式架构在安全性、可扩展性等方面的困境。域集中架构的基本思路是根据功能将多个ECU 的功能进行聚类,整车只部署几个域控制器(domain control unit, DCU)主控。典型的基于中央网关的域集中架构如图2所示,该架构各DCU 负责完成各域的数据处理与功能决策,对该域下属的传感器与执行器进行控制管理。域间通过中央网关交换所需数据,这种架构形式不仅保证了域间可以根据需求进行通信和互操作,同时也实现了信息安全与功能安全。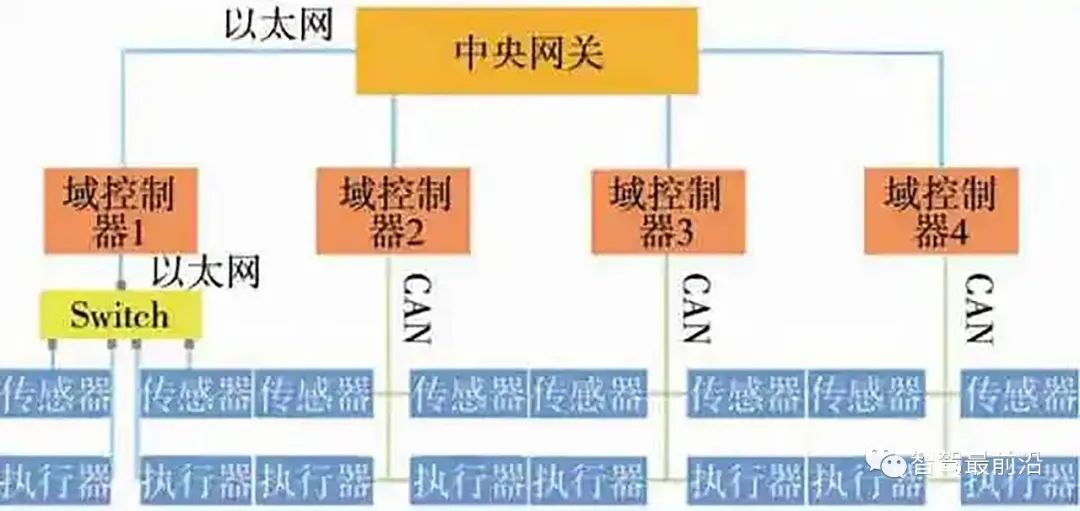
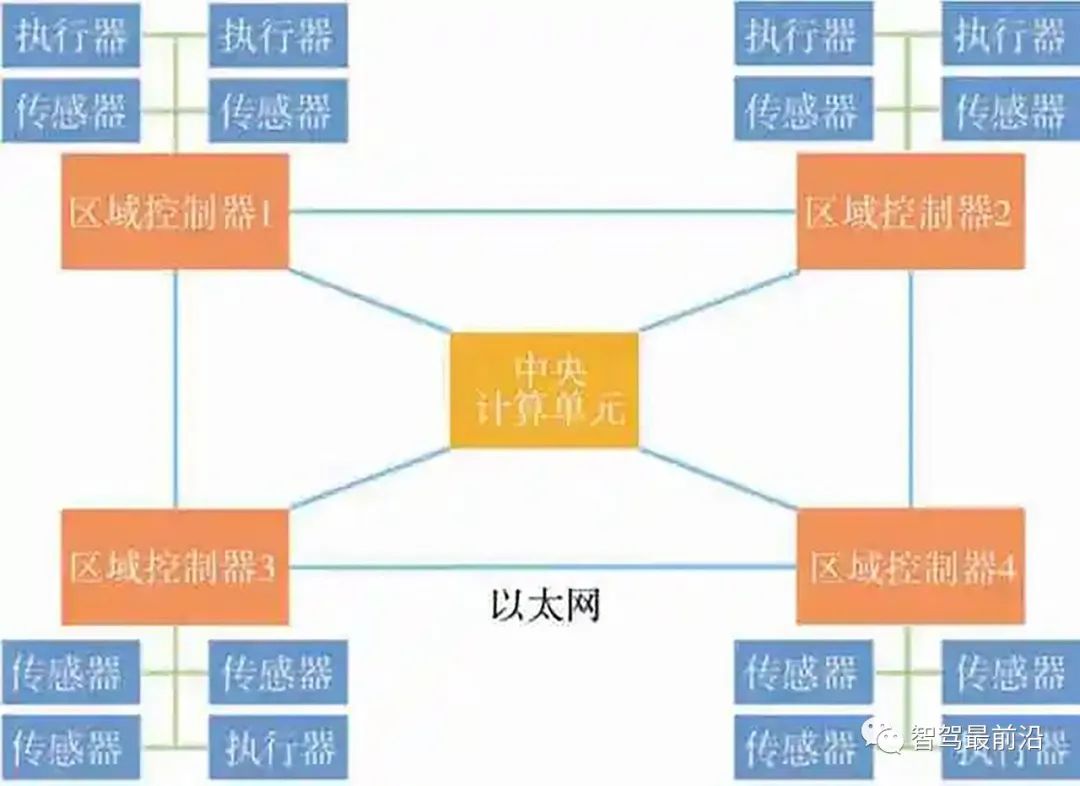
与传统ECU 相比,DCU 具有强大的硬件计算能力和丰富的软件接口支持,使得更多核心功能模块集中于DCU 内,域内算力集中,提高了系统功能集成度。单个ECU 的作用弱化,复杂的数据处理和控制功能被统一安排在DCU 中,ECU 逐步退化为DCU命令的执行器。在通信方面,以太网成为域间通信的骨干网,通信速率得以显著提升。得益于软硬件解耦、接口标准化以及信讯性能升级,域集中架构是架构设计思想由信号驱动模式转向为SOA 模式的分水岭。在域集中架构中软件与硬件具备分层解耦可行性,系统耦合度降低,软件的远程升级(OTA)与硬件部署更加便捷,同时标准化接口也使得传感器与执行器模块无须与具体ECU 相对应,从而支持零部件标准化生产。为进一步降低车内结构连接的复杂度,提高算力的利用率,降低器件的综合成本,提高冗余安全性,中央集中式架构将域集中架构中的多个DCU 进一步的融合,形成一个或多个拥有算力更强的多核异构SoC 芯片以及多种操作系统组合的中央计算平台(central computing platform, CCP)。车载传感器与执行器等不再按照功能去部署,而是按照物理位置划分就近接入区域控制器(zonal control unit,ZCU)。中央集中架构典型的拓扑如图3 和图4 所示。在该架构中,各采集、执行节点将原始数据通过ZCU 传输到多个或一个CCP 中处理,所有数据处理与决策都在CCP 中完成。ZCU 更多地承担数据采集、通信协议转化与数据传输等功能。多个ZCU 之间通过以太网组成环形网络,进一步提高了通信冗余及可靠性。按照区域进行传感器与执行器的就近接入简化了构型布置,缩短了线束长度。如图 4 所示,架构将整车控制计算功能全部集中到一个CCP中,但是从目前的技术能力来看,图3 所代表的多CCP 架构,从硬件设计、软件开发以及安全冗余都比单CCP要求更低,是当前架构的主流方案。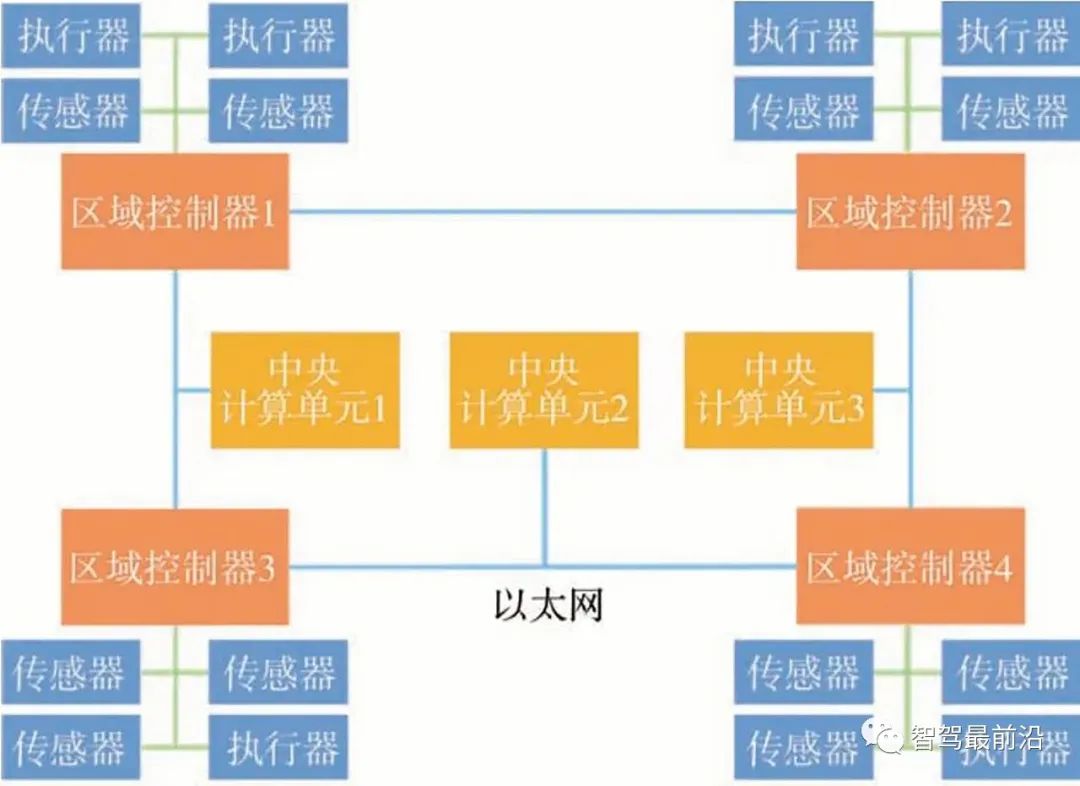
综合来看,E/E 架构实现分布式架构→域集中式架构→中央集中式架构发展带来了以下优势:(1)算力集中化,算力利用率更高。汽车在实际运行过程中,大部分时间仅部分芯片执行计算工作,导致分散的各个独立功能的ECU 运算处理能力处于闲置中,采用计算集中架构方式,可以在综合情况下,最大化利用处理器算力。(2)统一交互,实现整车功能协同。传统分布式架构从执行器、传感器、控制器、软件算法等都是紧耦合设计,造成跨部件跨ECU 级特性设计和开发效率低、升级困难等问题。集中式架构(后文代指域集中式架构和中央集中式架构)为软硬件解耦提供基础,减少ECU 数量,实现真正意义上的整车级特性开发,便于快速迭代和上市,大幅降低开发和升级成本。(3)缩短整车线束长度和质量,降低故障率。传统分布式ECU 造成线束较长、错综复杂以及导致电磁干扰,故障率较高。集中式架构实现执行器、传感器等部件区域接入,缩短线束长度、降低整车质量。(4)为软硬件解耦奠定基础,支撑软件定义汽车。分布式软硬件紧密耦合而难以解耦,集中式架构实现了功能和算力的集中,为软硬解耦、软件分层提供了条件。(5)车辆易于平台化,扩展性增强。集中式架构下ECU 的功能被弱化,传感器和执行器接口实现标准化和通用化,域控制器和区域控制器可根据需求调整配置以匹配不同的传感器和执行器方案。
传统汽车E/E 架构设计主要是对E/E 元器件进行合理的排布以达到性能最优、成本最低[11] ,而多域E/E 架构不仅要满足传统目标,还须成为智能网联汽车软硬件搭载的基础设施、汽车系统功能与性能的支撑载体。ICV 多域E/E 架构设计的主要任务包括:(1)根据车辆功能需求合理划分各子系统功能,明确功能逻辑连接关系,实现软硬件映射。(2)权衡功能交互、成本、供配电等因素设计硬件空间拓扑、连接拓扑和通信拓扑。(3)形成集成控制器、传感器、处理器、线束、功能软件等软硬件的多维度整车系统设计方案。(4)最终降低系统重复性,提高系统可验证性、高集成性、高安全性与可扩展性。ICV 功能配置的复杂性与多样性引发了E/E 架构设计理论与方法的相应变革。目前基于模型(model based systems engineering,MBSE)的汽车E/E架构设计开发方法逐步引起重视。MBSE 从E/E 架构设计伊始即以模型的形式进行表达,对各复杂系统的需求、结构与行为等进行基于图的无二义性说明、分析、设计等,从而在相关设计人员间建立统一的交流平台。MBSE 方法可解决整车E/E 架构研发过程中的工程数据不一致性、可验证性、可追溯性等问题,降低整车产品开发难度、尽早发现和避免潜在风险,进而提升开发效率和降低开发成本以及后期维护成本。图5 为基于MBSE 的汽车E/E 架构V 字型设计开发流程。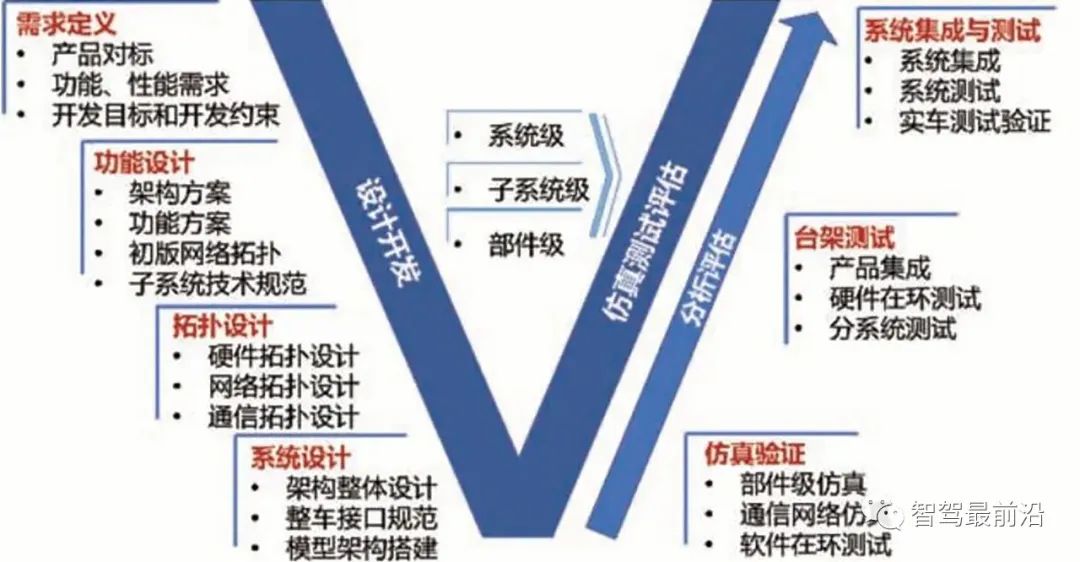
E/E 架构设计是整车设计核心任务之一,E/E 架构评估是架构方案再优化的直接参考依据。综合目前E/E 架构的主流开发设计流程及面向ICV 的E/E架构需求,确定多域E/E 架构总体设计重点内容主要包括以下5 个方面:架构需求定义、架构功能设计、架构拓扑设计、架构系统设计、架构分析评估。无论是传统还是多域E/E 架构开发,都必须从市场需求角度出发,进行全面的需求分析。基于分析评估,架构需求定义需要确定功能方案实现的目标,制定开发车型的整车需求,明确整车系统及各个子系统的需求,并同时制定出整车验证测试规范[12] 。分析开发需求的最终目的是确定系统的内部框架,满足外部系统需求,归纳出汽车电子系统必须实现的功能与非功能需求。通过需求分析,识别出开发目标和开发约束,是整个架构设计的起点[13] 。根据架构的需求定义完成架构的总体功能设计。为降低E/E 架构的复杂性,对总体功能进行细分切割,对软硬件进行解耦。常用的功能设计方法首先将整车功能划分为一级功能域级别,再对功能域进行详细的二级功能划分,以实现将二级网络中控制器的功能移至域控制器,为后续高级的功能落地提供基础,支持更高级的功能实现[14] 。功能架构设计阶段须完成初版网络拓扑、电子电气方案、子系统技术规范、功能方案等设计工作。根据架构功能,提取架构的基本拓扑结构,具体包括硬件拓扑架构、连接拓扑架构、通信拓扑架构。通过对拓扑架构细化优化,输出最优拓扑方案,为其他设计部门进行软硬件开发提供设计规范。硬件拓扑架构主要涉及硬件部件的整车安装布局、内部构成及其对外接口的详细信息,包括部件与其它部件的组合关系,以及部件的内部细节。连接拓扑架构描述了各部件之间的逻辑连接方式及实现情况,包括具体的导线、线缆连接方式、保险继电器盒的内部结构等。通信拓扑基于域间/域内不同通信需求,完成通信组网以及协议确定。根据上述阶段制定的电源分配图、接地点、整车Planview 以及供应商提供的接口控制文件,架构系统设计须完成整车原理、接口定义及功能规范设计,并搭建整体架构模型。通过拓扑层信息、已有开发数据库、经验输入等条件的支撑,实现正确的逻辑和算法定义。完成系统级E/E 架构的解决方案制定和系统级验证测试规范制定。最终实现功能下发,更新到产品部件设计中加以落实和验证[15] 。传统的E/E 架构在装车前实现整车仿真较难,多数只完成部件级仿真。随着RTaW[16] 、CANoe[17]和VEOS[18] 等架构评估商业化软件的发展,业界已经逐步使用更加全面的架构仿真评估软件进行功能、通信、安全等方面的迭代验证与优化[19] 。多域E/E 架构的分析评估,除硬件成本、开发成本、生产成本、保修成本、车辆性能燃油经济性、质量等传统目标外,还需要关注以下新问题:(1)是否满足用户个性化需求及未来可能的需求变化,主要在于能够满足自动驾驶L3 等级及以上车辆架构需求变化。(2)平台是否具有良好的沿用性以及平台公用性,能否满足高等级自动驾驶和智能网联的基本技术需求,具有超前的技术先进性[20] 。
为了减少总线长度与ECU 数量,以达到减轻电子部件质量、降低整车制造成本的目的,将分散的ECU按照功能划分,集成为运算能力更强、接口更为丰富的DCU。现有技术方案通常将整车划分为车控域、智驾域和座舱域。车控域控制器负责整车动力系统控制、底盘系统控制以及车身系统控制。智驾域控制器配置丰富的接口以满足多种类传感器信号的采集,集成高算力异构计算平台以支撑复杂的传感器数据融合算法,结合高精地图和导航等信息进行环境识别、路径规划,并输出整车控制指令,从而实现更高级别的智能驾驶功能[21] 。典型的自驾域控制器如图6 所示,计算平台上集成有通用计算单元、AI计算单元、实时控制单元以及多种接口。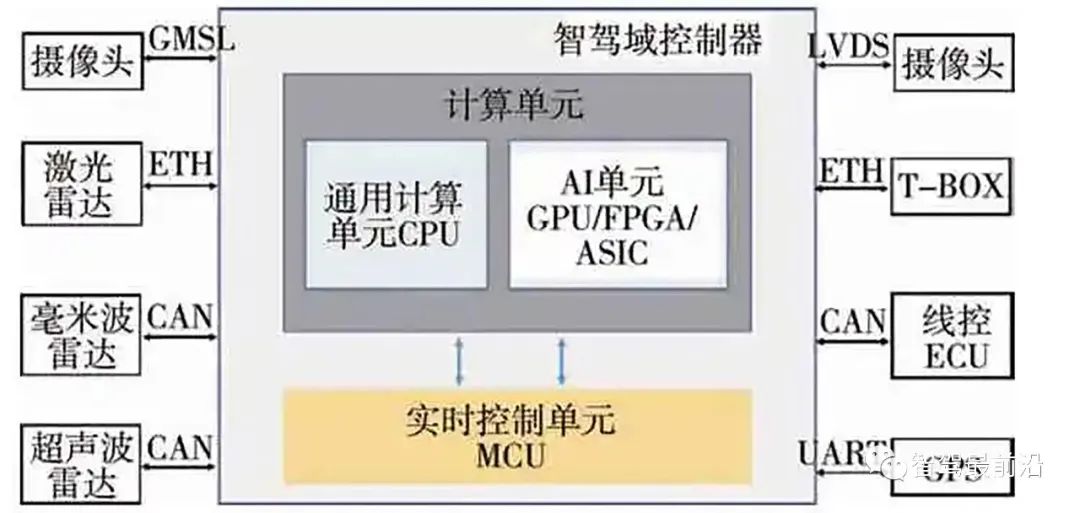
座舱域控制器通常集成了全液晶仪表、抬头显示器、流媒体后视镜、座舱娱乐系统、车联网以及远程信息等,同时也是人与车技系统交互的接口[22] 。智能座舱域控制器须具备强大的处理能力以及复杂的操作系统,由主控芯片、实时微处理器、数字信号处理器、CAN、以太网口等组成,典型功能如图7所示。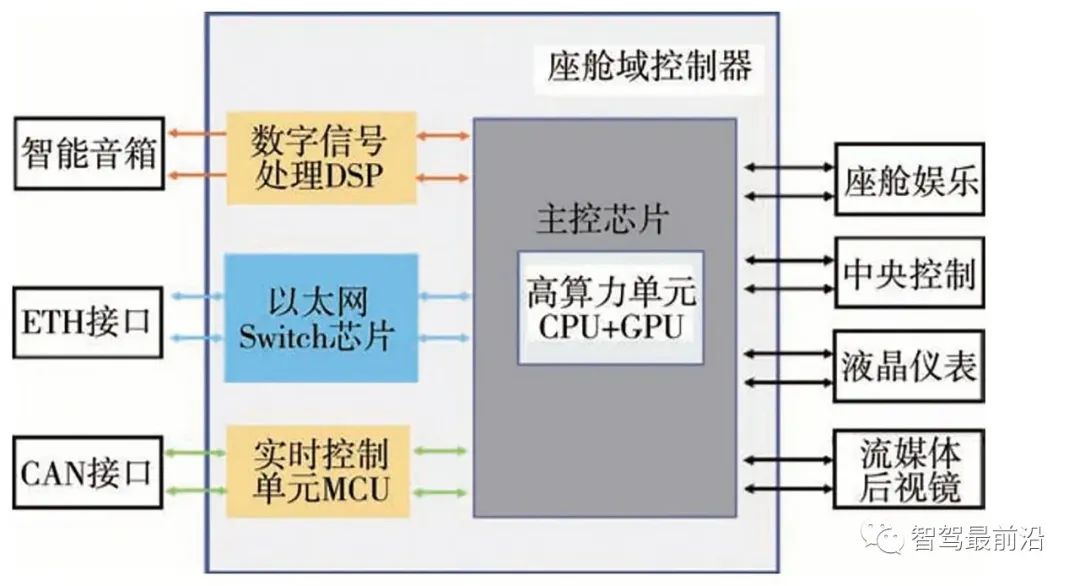
ZCU 主要有区域数据中心、区域IO 中心以及区域配电中心3 大功能,如图8 所示。作为区域数据中心配备有ETH、CAN、LIN 等丰富网络接口,充当区域网关、交换机功能实现网络通信与路由。区域IO 中心支持各类型的传感器、执行器以及显示器接口。ZCU 作为区域配电中心负责将电力向下输送到控制器、执行器等用电设备,现阶段趋向于用电子保险丝(eFuse)替代传统的继电器加熔断丝的方案,以实现智能管理。同时ZCU 具备吸收区内其他ECU功能的能力,将区内的功能在服务层面进行抽象,控制I/O虚拟化。因涉及到对安全性、实时性以及可靠性要求较高车控功能,ZCU 主控芯片一般会配备ASIL-D的MCU,后续发展有引入高算力计算单元的趋势[23] 。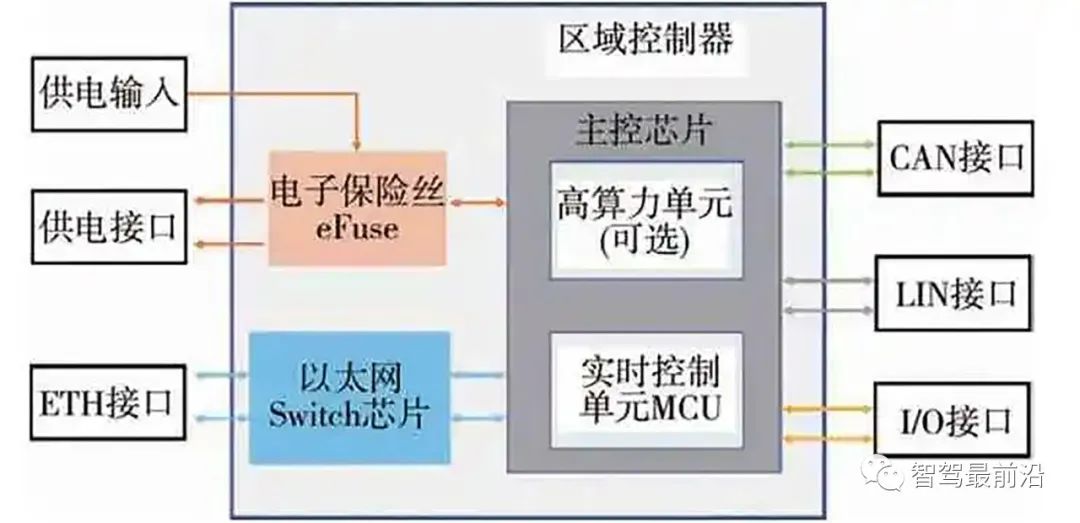
3.3 中央计算单元及关键技术
中央计算单元的核心定位提供足够的算力以支撑智能驾驶和智能座舱相关的业务逻辑,同时须具高带宽低时延的通信能力支撑与区域控制器之间的数据交换,并且具备网联功能,连接到车端和云端[24] 。中央计算单元硬件层面上大多会采用多颗异构多核SoC 芯片,芯片间采用高速串行通信或者PCIe。其中SoC 芯片架构主要有硬件隔离式和软件隔离式两种形态,均是采用虚拟化方案同时运行多个操作系统。硬件隔离式是在软件设计阶段划定各个核心运行的操作系统,各个系统依然在硬件上进行隔离,拥有专属硬件资源;而软件虚拟式中操作系统没有专属的硬件资源,硬件资源由Hypervisor层动态调配。
3.4 电源系统及关键技术
随着整车电气负载的增加、电气架构的发展、半导体技术的突破,电源系统设计已从电源部件的组合转型为电源网络的系统设计和电源网络的控制设计。传统车载电源系统多采用中央电气盒的方案,电路的控制与保护采用继电器与熔断器,存在继电器烧蚀以及熔断器损毁后无法再利用的问题。现阶段电源系统主要技术路线是保护和控制的融合,使用基于MOSFET 的eFuse 进行配电[25] 。单个芯片集成驱动、电流检测、热保护、过压保护、过流保护、EMC以及开路短路等各种诊断。
3.5 线束系统及关键技术
线束对整车电器电子功能的实现起着至关重要的作用,也是架构优化设计的研究热点。在线束布置的总体设计中要充分考虑各相关的边界条件,充分考虑各相关件对线束布置可能产生的影响,并对相关件的设计提出相应合理的要求。陈华梦[26] 分析了汽车线束的设计准则,基于数学层次模型和优化模型来达到线束设计的优化目的。周涛[27] 和郑继翔[28] 提出了基于PREEvision 的线束系统开发方法,设定了线束回路数、平均线径、质量、成本、总线负载率、可扩展性和可靠性等方面的评估标准,对线束系统进行全面评估。目前线束系统的设计趋向于成熟化、全面化,基于PREEvision 软件展开的多维度、多目标线束建模、设计、评估和优化方法极大地简化了线束系统的设计过程,提高了设计效率,提升了设计效果。

多域电子电气架构的通信系统
4.1 车载通信系统发展及现状
E/E 架构依靠通信系统实现各个硬件间的信息传递。目前主要的通信技术有5 种:控制器局域网(CAN)[29] 、局域互联网(LIN)[30] 、面向多媒体的系统传输(MOST)[31] 、FlexRay 总线[32] 和车载以太网(ETH)[33] 。
5种通信技术的主要特征如表1所示。
表1 各通信技术特性表
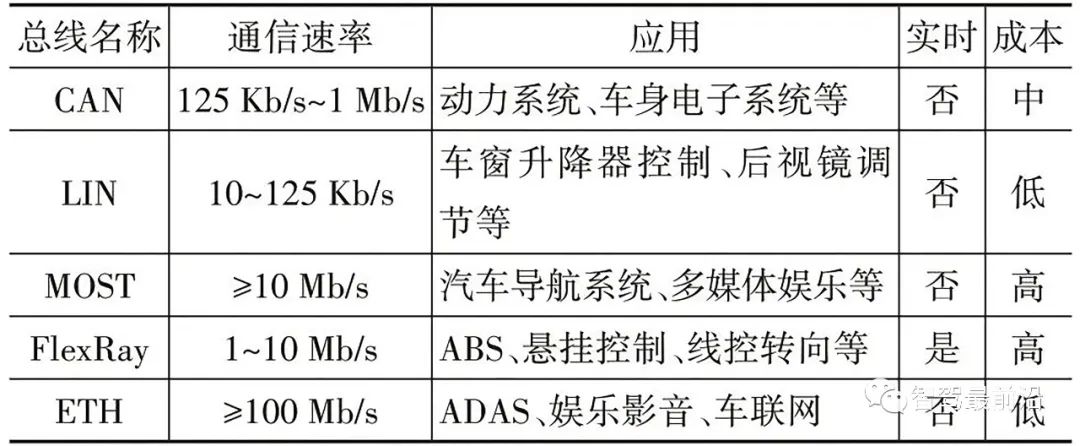
除了上述外,还有一些处于试验阶段的新型车载通信技术。如第三代CAN 通信技术CAN XL[34] ,该技术缩小了CAN 与ETH 之间的传输速度和耦合的差距,可与以太网共同在基于信号的通信和面向服务的通信之间提供连接。在未来,车载通信系统的安全性和保密性将得到重视,光纤通信具有抗电磁干扰、无辐射、难以窃听的优点,在车载通信安全、故障诊断与高精度控制领域也有广阔的应用空间。随着汽车智能驾驶等级的不断提高,车载元器件数量呈指数级上升,信息数据量增多,对车载总线网络在传输速率、实时性、容错率以及成本方面都提出了更高的要求[35] 。CAN 总线虽然受到传输数据量少和时间不同步的限制,但其技术成熟度高,目前仍是车载总线技术的支柱[36] ;而LIN 总线、MOST 总线和FlexRay 通常根据其自身特点作为局域网络接入;以太网凭借其高带宽及低成本的优势将作为通信系统的骨干网络在未来引领下一代车载网络的发展。目前情况下,要形成一个统一的车载总线协议标准仍需要较长时间。因此,在这之前,车载网络系统仍然需要采用多总线并存的方式来满足不同的传输需求,进一步完善各种车载总线标准的兼容性和互操作性,以实现更好的数据交换和系统集成仍然是多域E/E架构需要解决的关键问题之一。随着高精度传感器的广泛部署和信息娱乐系统的功能不断增强,车内数据量急剧增加,传统的车载网络难以有效支持和处理不断增长的高速率、高带宽通信需求[37] 。时间敏感网络(time sensitive network,TSN)可实现数据在以太网中的确定性、实时性、低延时、高安全传输,被认为是解决以上问题的关键方案[38] 。TSN 可实现低成本大带宽传输,传输速率可达10 Mb/s 至10 Gb/s,而且使用非屏蔽单对双绞线实现全双工通信,成本比传统的屏蔽线缆降低80%,质量减轻30%[39] 。此外,TSN 具有良好的扩展性和通用性,可支持多种构型的车载网络拓扑结构,实现不同应用数据的传输。对车载通信具有重要影响的TSN 协议可以分为4 种类型:时间同步、流量控制、可靠性和资源管理,下文将对其进行详细介绍。部署了TSN 的E/E 架构的通信系统运行时,需要有一个统一的时间标度以保证时间同步的精度。TSN 的IEEE 802.1AS—2020 协议[40] 对TSN 流的时间同步方法和过程进行了定义和解释。通过时间戳机制保证所有组件受同一全局时钟控制,同时允许网络中存在不同时域。对该协议的研究主要包括同步精度的影响因素[41] ,本地时钟校正[42] 和同步质量评估[43] 等。在E/E 架构中,时钟同步精度是保证各个传感器实现高精度响应和定位外部环境的基础。虽然目前有大量的研究针对工业TSN 的时钟同步,但缺乏专门针对车内TSN时钟同步特性的研究。车内通信环境与工业自动化系统有很大的差异,车辆的振动、温度变化、电磁干扰等因素会对时钟同步的精度造成干扰。因此,需要进一步研究车内TSN 时钟同步精度的影响因素,以确保实现车内通信系统的高可靠性和高效性。流量控制机制是TSN实现流确定低时延传输的关键技术之一。TSN 流量控制过程可以分为:流量分类、流量整形、流量调度和流量抢占[44] ,分别对应的TSN协议如表2所示。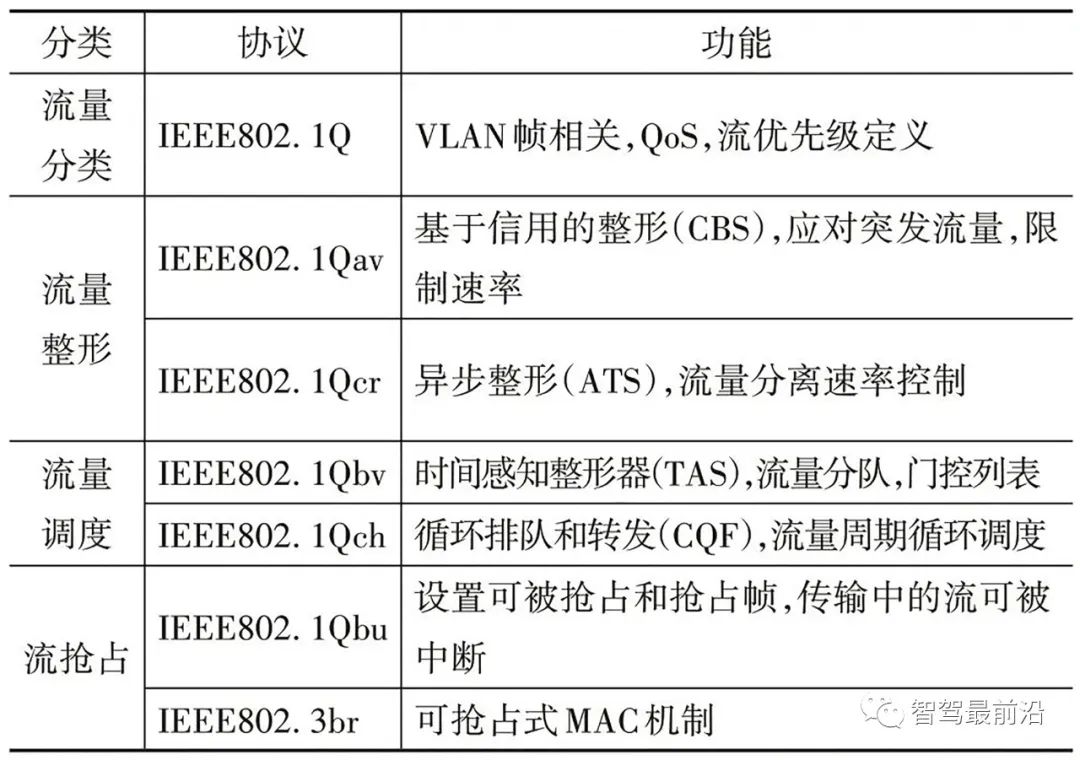
目前流量控制类协议的研究热点领域,主要研究包括:各类流量最大端到端时延分析[45] ,TSN流量整形方法研究[46] 和时间关键流的流量调度方法研究[47] 。目前的研究大多集中在单一协议,下一阶段需要围绕协议间的协同作用机制以及协议在实际车载网络场景下的应用开展。TSN 的可靠性指网络对故障的预防以及恢复能力,主要包括IEEE802.1CB 和IEEE802.1Qci 协议。IEEE802.1CB[48] 设置了帧的复制和消除(FRER)机制,降低了流传输时帧拥堵或故障带来的影响。主要针对控制类帧,严格限制丢包率,保证传输的可靠性。IEEE802.1Qci[49] 设置了帧的过滤与报错(PSFP)机制,针对网络出现故障时流的处理问题,避免了流量的过载和错误交付,提高了系统的鲁棒性。TSN 可靠性问题研究主要包括冗余机制[50] 、故障检测[51] 以及同步故障下的可靠性[52] 。后续研究应当重点关注车辆TSN网络在各种故障情况下的可靠性,确保车辆在行驶过程中的安全性和稳定性。资源管理的主要功能包括对网络资源进行管理和配置及对性能数据进行监测和分析等。IEEE802.1Qat[53] 流预留协议解决了流的注册与预留问题,是进行整形、调度和传输等过程的前提。IEEE802.1Qcc[54] 协议解决了TSN 网络的集中管控问题,提出了分布式、集中式和集中网络分布用户式3 种TSN 网络管控模型。目前研究主要围绕架构模型的实现部署方案展开[55-56]。这些研究成果为车辆TSN网络资源管理的实现提供了重要的技术支持和借鉴。后续研究应该重点关注如何实现车载TSN的管理与配置,重点突破事件触发流等随机流的管理、车-云安全交互管理等关键难题。TSN 作为多域E/E 架构的重要组成部分已经得到了充分的重视。但目前对TSN的研究主要集中在工业互联网领域,在车载TSN 网络的研究还不够深入,在技术的迁移中主要存在几大难点亟待解决:(1)场景构建问题,大数据、多种类的车载TSN 网络模型的构建较为复杂,事件触发的随机信号流建模困难。(2)功能匹配问题,如何设计软件去实现TSN的相关标准,以及TSN 协议在车载场景下的执行情况和效果如何都有待实验验证。(3)硬件支持问题,目前支持TSN以太网的芯片相对较少且没有针对车载TSN 的专业测试设备,硬件实验平台的搭建较为困难。虽然困难重重但是仍然无法否定TSN在车载实时通信的应用潜力。在未来,TSN 的带宽优势有望进一步提高[57] ;车载TSN 与IP 协议的结合,使更多更复杂的车载安全和多媒体应用成为了可能[58] ;随着自动驾驶等级的提升,TSN 的可靠性将随着车载网络信息安全性进一步得到提高;TSN 协议的开放性也为学术研究和工业部署提供了更开阔的空间。传统的车载网络存在流量负载分布不均衡、报文发送延迟大、网络吞吐量低、网络模块兼容性差和开放性低等问题,不利于进一步的开发和创新,也不利于未来各车型智能车载系统的互联互通。为了解决这个问题, Ku 等[59] 在2014 年最先提出了软件定义车载网(software defined vehicular network, SDVN)的概念。SDVN 将软件定义网络技术(SDN)应用到车载网络中,用软件定义网络的思想改造车载网络的体系结构。SDVN 首先将车载网络设备中的数据转发平面与控制平面分离开来,然后将所有的控制平面集中到一个逻辑上集中的控制器中,最后利用这个集中的控制器控制车载网络中所有数据转发平面报文的转发行为[60] 。SDVN 可有效提高网络性能、降低网络服务更新的代价、简化网络管理、加速网络创新。在SDVN 的应用方面,He 等[61] 提出了一种支持异构无线接口以提高网络性能的SDVN 架构,使车载网络的配置更加灵活。Ge等[62] 提出了一种集成5G 移动通信技术、SDVN 以及云计算的车载网架构,提高了车载网络可扩展性。Correia 等[63] 提出了一个分层的SDVN 车载网络架构,并基于Rawashde 等[64] 提出的聚类算法设计了一种新的路由协议,实现了数据的快传输、低延迟和高吞吐量。大量研究人员都希望通过SDVN 来具体实现TSN 的集中式模型构想。Hackel 等[65] 证明了TSN 与SDVN的结合能够保障时间敏感流的传输质量,在汽车网络中具有巨大的潜力。Gerhard 等[66] 结合SDVN 提出了一种软件定义流保留的体系架构并根据802.1Qcc 定义了一个功能完整的TSN 配置基础设施。目前基于服务的SDVN 还处于起步阶段,在安全性、移动性、服务效率、部署和标准化等方面还有很多亟待解决的关键技术问题。但SDVN 作为一种可编程和高灵活的网络架构仍具有很好的发展前景,可被应用于高效带宽分配、车-路-云弹性算力分配等诸多场景。(1)未来车载的通信协议将向着大带宽、低成本、高安全的方向发展,车载TSN将成为骨干网络,提供确定性、高带宽和高安全的连接,现有总线形式在某些特定场景仍将保留。(2)为应对智能驾驶带来的挑战,车载网络将实现更多的安全功能,SDVN 的应用将进一步提高网络的可配置性和灵活性。(3)不同通信软件组件之间的接口将进一步标准化,软件的互换性将显著提高。
随着功能的丰富,车辆设计的核心逐渐从硬件设计转移到软件开发,软件成为塑造整车厂竞争力核心要素[67] 。SDV 的概念已成为产业界的共识,软件的开发、升级将成为贯穿设计、销售和服务的车辆全生命周期关键组件。基于SDV 的汽车整车开发流程将形成用户交互评价信息指导新车开发、OTA技术实现软件持续更新迭代的双闭环模式[68] 。基于服务的软件架构如图9所示。该软件架构一般被分为4层[69] 。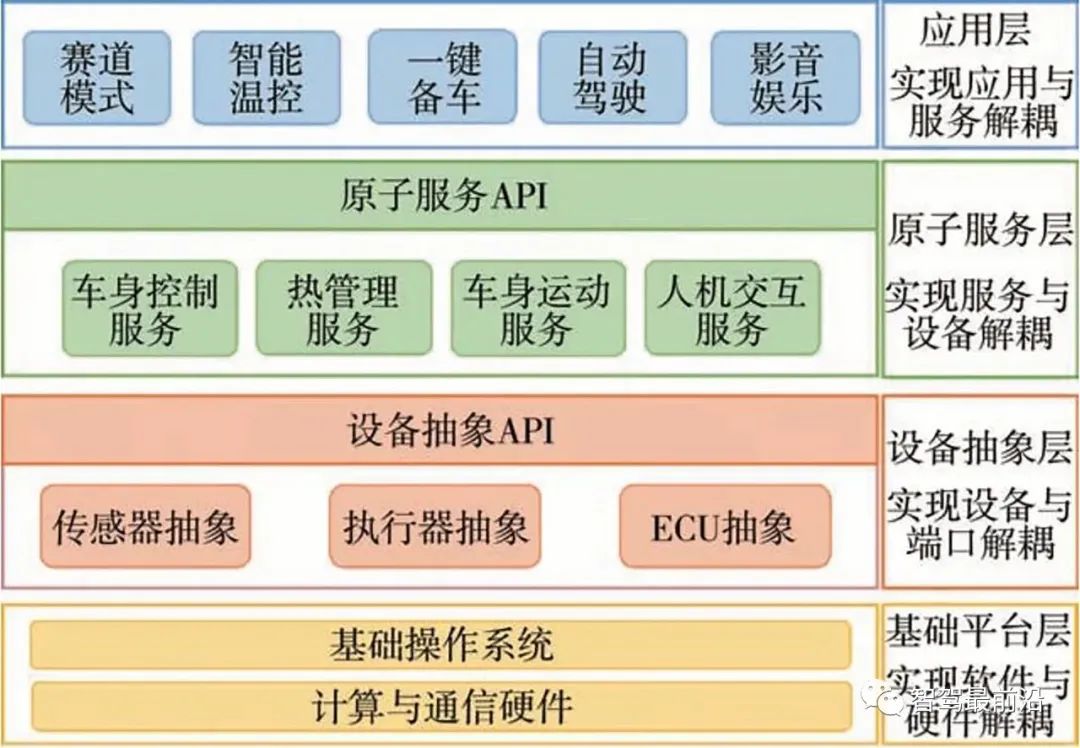
SDV 的重要优势就是减少了硬件差异对软件的影响,从设备抽象层与原子服务层的软件设计追求多车复用与减少差异化。通过API 标准化接口,减少重复劳动,降低软件的复杂度,提高软件的设计开发效率。在应用层的设计则重点打造差异化与定制化功能,最终实现软件组件的高附加值与个性化服务。同时SDV 和OTA 技术的出现对汽车整车开发流程也带来了新的变革SDV 实现的重要前提是软硬件解耦,它是指软件系统的设计完全独立于硬件,在软件框架中通过对硬件接口进行抽象化处理来兼容不同硬件设备。软硬件解耦的关键在于接口定义的标准化,这需要整个汽车产业合理分工,通力配合,形成统一的软硬件接口定义技术规范。实现软硬件解耦对未来汽车开发、验证和售后都将产生举足轻重的影响。首先,软硬件的解耦使得数据被从一个个子系统中解放出来,整车厂对功能实现的控制能力增强,这将对产业分工产生重要影响。其次,软件可以脱离硬件进行独立验证,原本需要通过硬件在环测试的功能可以通过集成硬件环境的软件在环测试进行验证,这将极大地加快整车开发与测试速度,降低验证成本。另外,汽车全生命周期的可升级,将有效提高汽车售后的可维护性和安全性,通过远程升级(OTA)软件可以逐步解放功能,有效增强用户体验和提高汽车保值能力。然而,目前受到传统研发模式、企业转型困难以及产业分工矛盾的影响,软硬件的解耦仍然与理想状态相去甚远[70] 。伴随着软硬件解耦而来的是软硬件映射问题,由于DCU 和CCP 需要集成包括传感器数据处理、智能人机交互和高精度控制决策等众多功能于一体,数据处理的复杂度骤增。如何将不同数据运算特点的功能软件映射到匹配的处理器、实现软硬件的协同最优是软硬件映射需要解决的核心问题。多域E/E 架构引入了多种微处理器、大量异构计算资源与通信链路组合,使得需要考虑的因素进一步复杂。早期的研究通常根据任务通信关系和属性,考虑时间、成本以及功耗等因素对单核异构系统进行软硬件映射[71-72]。随着多核嵌入式芯片的发展,大量研究针对多核分布式异构系统软硬件映射问题提出优化设计方法[73-74],优化目标包括能耗优化[75-76]和硬件成本优化[77-78]等。车载多核异构芯片对于成本、功耗、安全、算力和实时性等因素极其敏感,如何综合考虑以上因素,根据功能设计专有芯片结构,并实现易于解耦的软硬件映射是未来车载主控芯片设计需要突破的关键难题。面向服务的体系架构(SOA)是汽车产业从IT产业引入的先进理念,凭借可重用、易升级、易部署和松耦合的特点被认为是ICV 汽车软件发展的重要方向。SOA的理念是通过灵活的接口使服务不再局限于特定的功能环境,实现服务共享[79] ,其中接口的定义需要根据SOA 标准进行设计,独立于操作系统与硬件平台。这与上文提到的SDV 原子服务层和设备抽象层的概念相辅相成。SOA的引入打破了传统汽车软件固化、封闭的生态,使之逐渐开放、开源。目前汽车产业对SOA 软件设计已经做了相关实践并提出基于SAO 的软件开发模式[80-81],验证出SOA使系统复杂度大大降低,各代汽车之间的软件组件的重复使用大大简化。为了保证了各系统服务之间的信息互通和组合形式的扩展,各服务模块之间通过基于服务的中间件进行通信,这改变了车内通信方式。传统的基于信号的通信方式,在车辆设计时就完成了通信矩阵的定义,信号的数据量、发送周期、路由路径是固化的,静态的。基于服务的中间件则是通过在应用程序和网络之间进行一定的抽象,在服务与应用之间建立相应的网络连接。这个通信过程通常是动态的,可在运行时配置,不需要在设计时进行固化[82]。目前主流的面向服务的中间件主要包括DDS(data distribution service)与SOME/IP(scalable serviceoriented middleware over IP)。它们在AutoSAR 中都被集成为标准化模块,因此被行业视为一流的解决方案。SOME/IP、DDS 和基于信号驱动的通信机制对比如表3所示。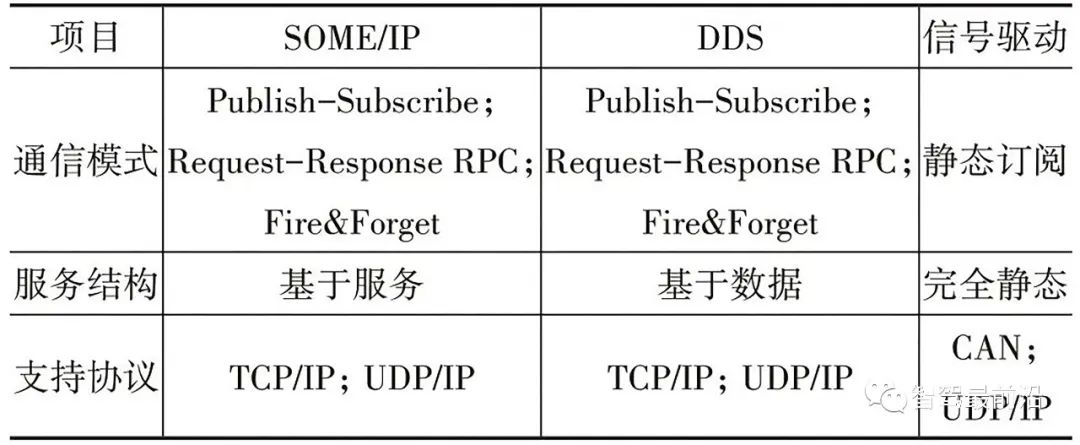
5.3 车用操作系统
车用操作系统作为车内系统程序的集合,主要用来实现管理硬件资源、隐藏内部逻辑提供软件平台、提供用户程序与系统交互接口、为上层应用提供基础服务等功能,包含车控操作系统和车载操作系统两大类[83] 。
5.3.1 车控操作系统
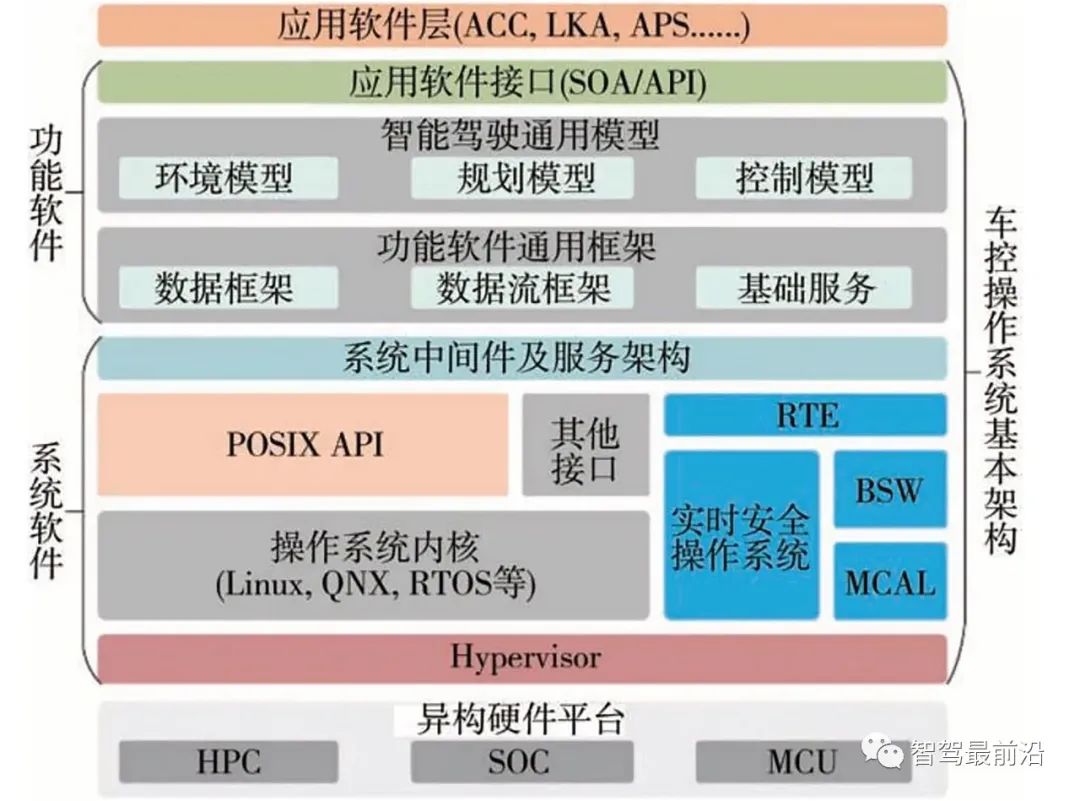
车控操作系统主要包括安全车控以及智能驾驶两个子类操作系统,其基本架构如图10所示。安全车控操作系统主要面向实时性要求极高,并且安全等级要求须达到ASIL-D 的传统车辆底盘、动力、车身等功能领域,目前主流的安全车控操作系统大多兼 容 OSEK 以 及 AUTOSAR Classic Platform(AUTOSAR CP)标准软件架构,目前相关技术已经较为成熟[84] 。
基于AUTOSAR CP 的操作系统软件的开发相较于传统开发方式已经基本实现应用层和底层软件以及软件和硬件的解耦,从而一定程度上增强了软件的移植、复用、扩展、升级、安全和维护等能力,对减少软件开发周期和降低成本都起到了有益作用[85] 。
智能驾驶操作系统则面向新一代集中式E/E 架构升级背景下高算力、高性能、高安全性、高可靠性要求的智能驾驶功能,此种操作系统正处于发展机遇期,各国都在初步探索阶段。对于智能驾驶操作系统AUTOSAR CP难以完全适应,基于此AUTOSAR组织在2017 年发布了基于POSIX PSE51 子集的操作系统与应用程序之间标准编程接口规范的面向服务架构的AUTOSAR Adaptive Platform(AUTOSAR AP)以应对异构芯片平台上车辆智能驾驶服务需求[86-87]。对于车控操作系统,国内外大部分企业均基于AUTOSAR 开发各自的系统[88] ,可以说AUTOSAR 软件架构标准在车控操作系统领域起到了关键的引领和参考作用,是目前国际上主流的汽车标准软件架构。基于AUTOSAR 标准的软件架构的实现离不开相应配置工具链解决方案的支持,当下主流工具链为德国Vector 公司的面向AUTOSAR CP 的DaVinci系列工具以及面向AP 的MICROSAR Adaptive;Bosch 旗下子公司ETAS 的面向CP 和AP 的RTACAR 以及RTA-VRTE。此外还有ElektroBit 公司下的EB tresos、EB corbos 系列CP 和AP 配置工具;Siemens 的Capital VSTAR,KPIT 的KSAR Classic、KSAR Adaptive 等。国内对于AUTOSAR 也积极布局,普华基础软件、东软睿驰等都相继推出各自的AUTOSR 解决方案,助力国产化工具链的实践落地[89] 。车载操作系统主要面向车辆上安全性、实时性要求相对较低的信息娱乐功能需要,发展较为迅速[90] 。现阶段主流的车载操作系统在实时性、安全性、应用场景等方面的对比如表4所示[91] 。
伴随着智能化、网联化的深入发展,单个的车载操作系统已难以应对车上信息娱乐功能的不断丰富,车载操作系统逐步向多操作系统架构过渡。多操作系统架构主要有两种实现方式,基于硬件隔离的架构[92] 以及基于虚拟化管理技术(Hypervisor)的架构[93] 。硬件隔离架构由于在物理层面上进行了硬件分区,相应的资源分配管理问题得到了简化,较容易开发,但是固定的硬件分区下可能导致其灵活性相对较差,并可能会造成一定程度的资源浪费;而基于Hypervisor 进行多操作系统隔离以管理多个操作系统平台及其应用程序则可以避免系统资源的固定分配,提高资源利用率,并且其利用主机内存作为数据交互媒介,数据共享能力显著提高,但同时也造成了系统开发复杂度和安全风险的提升[94] 。
目前针对ICV 的多域E/E 架构研究日益增加,各国学术界和工业界均展开了大量的研究,各大型车企也都在先进车型上进行了初步部署,但是由于E/E 架构涉及要素的综合性和复杂性,仍未形成一套完备的E/E 架构设计理论、工程方法以及工具软件,建议进一步加强下述研究。业界现有架构开发仍然存在着大量的依靠工程经验的设计,但是随着功能的复杂化,需求的多元化和迭代的快速化,基于经验的设计很难得到最优的设计效果。因此必须尽快形成完整的设计理论和方法,为架构总体设计提供从总体设计理论到工程实践应用自上而下的指导。后续研究需要从ICV 的E/E 架构的设计问题的本质出发,研究架构实现安全性、经济性、可扩展性的设计机理。通过理论分析和试验验证,梳理汽车功能需求、安全需求与架构设计实现之间的内在联系,完成需求的规范化建模与功能的准确分割。基于现有主流架构和技术水平,开展架构建模、系统优化和分析的研究,形成架构设计的理论和方法。架构设计在车内涵盖软件、硬件与通信系统,在车外互通车端、路端和云端,各类接口复杂多样,单一厂商很难完成所有接口的端到端的设计。只有形成软件、硬件和通信接口标准体系,才能让产业链各方各抒己长,整车厂才能根据架构总体设计框架进行集成、灵活配置,从而推动ICV 快速落地。在自顶向下的服务设计上,标准化接口应使应用层和通信层开发专注于业务逻辑,不受限于硬件实现;在自底向上的抽象设计上,应该使底层硬件设备能关注到不同车型差异,具备通过对配置的灵活更改以减小代码差异化的能力。E/E 架构仿真评估技术是验证设计合理性和实现快速迭代更新的基础,因此需要建立多层级、一体化、虚实结合的E/E 架构测试验证体系。开展融合虚拟仿真、封闭场景、开放道路测试的多环境交互技术研究,研发适用于失效分析与风险评估的E/E 仿真场景库挖掘与重构技术,开发实时性评估仿真分析平台,实现架构评估与仿真测试的平台化与标准化。面向硬件在环和实车在环测试的物理信号高保真和实时模拟技术,开发网联场景下的通信信号模拟装置,开展E/E 架构测试验证体系的多层级建设,形成部件级、系统级、整车级多层次的测试评价方法,实现E/E架构测试验证体系的一体化设计。(4)加强多维度冗余架构体系设计与信息安全纵深防护技术研究为应对ICV 架构失效的隐蔽性和突发性难题,针对冗余架构体系下的传感器、控制器、执行器层面的故障检测方法及主动重构控制理论进行研究,探索高效精准的故障检测方法,建立完善的主动重构控制机制,保证在一定故障下ICV 仍具有正常行驶的能力。为了保证高级别自动驾驶系统的网络安全、数据安全和信息安全,需要从外部网联安全、域间控制安全、车载网络通信安全、控制器本体安全等多个维度出发,构造多层纵深防御体系,构建纵深防护技术理论,在保证系统安全的同时降低冗余度和系统复杂性。我国在ICV 领域已经具备了先发优势,但在高算力芯片、车用操作系统和架构设计工具软件等方面,与欧美等发达国家相比仍存在一定差距。虽然出现了大量国产化方案,但其功能完整度和产业支持配套相对较弱,尚未形成完整的国产化产业链。因此,当前我国需要进一步加快关键技术的国产化研发,将先发优势转化为领跑实力,努力发展出具有独立自主特色的中国汽车产业,提高自主品牌竞争力,推动我国汽车产业向高质量发展迈进。
多域E/E 架构对于未来ICV 能否普及并实现其预期功能有着重要意义。然而,在当前阶段该领域还没有形成完善的方法论、技术理论体系与工具链,行业仍然处在摸索与研究阶段,仍然需要大量的研究与实践投入。本文参考大量研究与产业实例,厘清了E/E架构的发展需求与挑战,梳理了E/E架构的技术现状,从总体设计、硬件系统、通信系统及软件系统4 个角度对多域E/E 架构的关键技术及现有方案进行详细的综述,最后对未来架构研究进行了展望。[1]CHU W, WUNIRI Q, DU X, et al. Cloud control system architectures, technologies and applications on intelligent and connected vehicles:a review[J]. Chinese Journal of Mechanical Engineering, 2021, 34(1):1-23.[2]李克强,常雪阳,李家文,等.智能网联汽车云控系统及其实现[J].汽车工程,2020,42(12):1595-1605.LI Keqiang, CHANG Xueyang, LI Jiawen, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020,42(12):1595-1605.[3]XU Q, LI K, WANG J, et al. The status, challenges, and trends:an interpretation of technology roadmap of intelligent and connected vehicles in China (2020) [J]. Journal of Intelligent and Connected Vehicles, 2022.[4]MIELKE T, NEGREAN M, LU W, et al.Managing distributed systems development through model-based E/E-architecture design[C]. SAE Paper 2015-26-0012.[5]JIANG S.Vehicle E/E architecture and its adaptation to new technical trends[C]. SAE Paper 2019-01-0862.[6]NAVALE V M, WILLIAMS K, LAGOSPIRIS A, et al.(R) evolution of E/E architectures[J]. SAE Int. J. Passenger Cars-Electron.Elect. Syst., 2015,8:282-288.[7]BANDUR V, SELIM G, PANTELIC V, et al. Making the case for centralized automotive E/E architectures[J]. IEEE Transactions on Vehicular Technology, 2021, 70(2):1230-1245.[8]ZENG W, KHALID M A S, CHOWDHURY S.In-vehicle networks outlook:achievements and challenges[J]. IEEE Commun.Surveys Tuts., 2016,18(3):1552-1571.[9]ZHU H, ZHOU W, LI Z, et al. Requirements-driven automotive electrical/electronic architecture:a survey and prospective trends[J]. IEEE Access, 2021, 9:100096-100112.[10]崔明阳,黄荷叶,许庆,等.智能网联汽车架构、功能与应用关键技术[J]. 清华大学学报(自然科学版),2022,62(3):493-508.CUI Mingyang, HUANG Heye, XU Qing, et al. Survey of intelligent and connected vehicle technologies:architectures, functions and applications [J]. Ysinghua Univ (Sci&Technol),2022,62(3):493-508.[11]李白.技术整合的解决之道 德尔福派克电气罗伯特·赛德勒谈汽车电子电气架构[J].汽车与配件,2010(16):22-23.LI Bai. Solutions to technical integration:an interview with robert seidlee from Delphi packard electrical/electronic architecture [J].Automobile & Parts, 2010(16):22-23.[12]邓戬. 智能网联汽车电子电气架构设计与试验研究[D].长春:吉林大学,2020.DENG Jian. Research on design and experiment of electronic and electrical architecture for intelligent connected vehicle [D].Changchun:Jilin University, 2020.[13]倪斌.汽车电子电气架构设计与优化研究[J].电子技术与软件工程,2013(17):270.NI Bin. Research on vehicle electronic and electrical architecture design and optimization [J]. Automotive Electronics, 2013(17):270.[14]积木家智能科技. 新型电子电气架构架构的思考[EB/OL].(2021-09-27) [2023-02-06]. https://zhuanlan. zhihu. com/p/498846265.Jimujia. Reflections on the new electronic and electrical architecture [EB/OL]. (2021-09-27) [2023-02-06]. https://zhuanlan.zhihu.com/p/498846265.[15]周连明.新能源电动汽车电子电气架构设计[J].电子技术与软件工程,2020(15):227-228.ZHOU Lianming. Design of electronic and electrical architecture for new energy electric vehicles [J]. Electronic Technology &Software Engineering, 2020(15):227-228.[16]RTaW [EB/OL]. Available:https://www. realtimeatwork. com.[17]CANoe. Vector. Accessed:Jan. 9, 2020 [EB/OL]. Available:https://www.vector.com/int/en/products/products-a-z/software/canoe/.[18]VEOS[EB/OL]. Available:https://www. dspace. com/zh/zho/home/products/sw/simulation_software/veos.cfm.[19]胡耘浩,李克强,向云丰,等.智能网联汽车通用跨平台实时仿真系统架构及应用[J].汽车工程,2023,45(3):372-381.HU Yunhao, LI Keqiang, XIANG Yunfeng, et al. The universal architecture and application of cross-platform real-time simulation system for intelligent connected vehicles [J]. Automotive Engineering, 2023,45(3):372-381.[20]匡小军, 唐香蕉, 李桂伟,等. 汽车电子电气架构需求分析及优化研究 [J]. 汽车电器, 2019(8):45-46.KUANG Xiaojun, TANG Xiangjiao, LI Guiwei, et al. Requirement analysis and optimization of automotive electronic and electrical architecture [J]. Auto Electric Parts, 2019(8):45-46.[21]ZHOU X, WANG K, ZHU L, et al. Development of vehicle domain controller based on ethernet[J].Journal of Physics:Conference Series. IOP Publishing, 2021, 1802(2):022065.[22]WANG D, GANESAN S. Automotive domain controller[C].2020 International Conference on Computing and Information Technology (ICCIT-1441). IEEE, 2020:1-5.[23]Automotive zone controller-application brief [EB/OL]. Available:https://www.nxp.com/docs/en/product-brief/S32G2ZONECONFS.pdf.[24]SOMMER S, CAMEK A, BECKER K, et al. Race:a centralized platform computer based architecture for automotive applications[C]. 2013 IEEE International Electric Vehicle Conference(IEVC). IEEE, 2013:1-6.[25]徐丽. 应用于宽电压范围Efuse电路设计[D].上海:复旦大学,2012.XU Li. Design of e-fuse circuit applied to wide voltage range[D]. Shanghai:Fudan University, 2012.[26]陈华梦. 汽车线束的优化设计和可靠性分析[D].上海:上海交通大学,2016.CHEN Huameng. Automotive wiring harness optimize design and reliability study [D]. Shanghai:Shanghai Jiaotong University,2016.[27]周涛. 基于PREEvision 的汽车电子电气架构研究[D].天津:河北工业大学,2016.ZHOU Tao. Design of vehicle electronic and electrical architecture based on preevision [D]. Tianjin:Hebei University of Technology, 2016.[28]郑继翔. 基于PREEvision 的汽车电子电气线束设计研究[D].天津:河北工业大学,2017.ZHENG Jixiang. Research on the design of automotive electronic and electrical harness based on preevision [D]. Tianjin:Hebei University of Technology, 2017.[29]来振华. 车载CAN 总线的技术特点及发展方向[J]. 汽车电器, 2009(4):l-2.LAI Zhenhua. Technical characteristics and development direction of vehicle can bus [J]. Auto Electric Parts, 2009(4):l-2.[30]DENUTO J V, EWBANK S, KLEJA F, et al. LIN bus and its potential for use in distributed multiplex applications[C]. SAE Paper 2001-01-0072.[31]张明. MOST 总线实验与开发平台的设计[D].长春:吉林大学,2005.ZHANG Ming. The design of the most bus experiment and development platform [D]. Changchun:Jilin University, 2005.[32]徐志俊,钟再敏,孙泽昌.FlexRay 总线在工业自动化领域的应用展望[J].工业控制计算机,2008(5):1-3.XU Zhijun, ZHONG Zaimin, SUN Zechang. Perspective of flexray bus used in industrial field [J]. Industrial Control Computer,2008(5):1-3.[33]李静茹. 车载以太网诊断协议的模糊测试技术研究[D].厦门:厦门理工学院,2022.LI Jingru. Research on fuzz testing techniques for automotive ethernet diagnostic protocol [D]. Xiamen:Xiamen University of Technology, 2022.[34]ZELTWANGER H. Zonal network architecture and CAN networks[C]. Internationales Stuttgarter Symposium:Automobil-und Motorentechnik. Wiesbaden:Springer Fachmedien Wiesbaden,2022:501-508.[35]郭炎荣,查云飞,陈文强,等.智能汽车电子电气架构综述[J].汽车文摘,2021(9):19-24.GUO Yanrong, ZHA Yunfei, CHEN Wenqiang, et al. Review on electronic and electrical architectures for intelligent vehicles[J].Automotive Digest, 2021(9):19-24.[36]陈艳梅,薛亮.智能网联汽车总线技术及其安全威胁分析[J].汽车与配件,2021(17):50-54.CHEN Yanmei, XUE Liang. Analysis of intelligent connected vehicle bus technology and its security threats [J]. Automobile &Parts, 2021(17):50-54.[37]SCHWABEL R. Technical challenges in future electrical architectures[C].SAE Paper 2011-01-1021.[38]宋华振.时间敏感型网络技术综述[J].自动化仪表,2020,41(2):1-9.SONG Huazhen. Summary on time sensitive network technology[J]. Process Automation Instrumentation, 2020,41(2):1-9.[39]胥京宇.博通切入汽车市场开启车载以太网时代[J].世界电子元器件,2012(2) :76-76.XU Jingyu. Broadcom enters the automotive market, opening the era of in-vehicle ethernet [J]. Global Electronics China, 2012(2):76-76.[40]IEEE.802.1AS-2020 - timing and synchronization for time-sensitive applications[S]. 2020.[41]MAHMOOD A,EXEL R,TRSEK H, et al. Clock synchronization over IEEE 802.11, a survey of methodologies and protocols[J].IEEE Transactions on Industrial Informatics, 2016, PP(2):907-922.[42]SHRESTHA D,PANG Z,DZUNG D . Precise clock synchronization in high performance wireless communication for time sensitive networking[J]. IEEE Access, 2018:1-1.[43]GUTIÉRREZ M,STEINER W,DOBRIN R, et al. Synchronization quality of IEEE 802.1AS in large-scale industrial automation networks[C].2017 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS). IEEE, 2017.[44]蔡岳平,姚宗辰,李天驰.时间敏感网络标准与研究综述[J].计算机学报,2021,44(7):1378-1397.CAI Yueping, YAO Zongchen, LI Tianchi. A survey on time-sensitive networking:standards and state-of-the-art [J]. Chinese Journal of Computers, 2021,44(7):1378-1397.[45]MEYER P, STEINBACH T, KORF F, et al. Extending IEEE 802.1 AVB with time-triggered scheduling:a simulation study of the coexistence of synchronous and asynchronous traffic[C]. Vehicular Networking Conference. IEEE, 2014.[46]THANGAMUTHU S, CONCER N, CUIJPERS P J L, et al.Analysis of Ethernet-switch traffific shapers for in-vehicle networking applications[C]. Proc. Design, Autom. Test Eur. Conf.Exhib. (DATE), 2015,:55-60.[47]KIM H J, LEE K C, LEE S. A genetic algorithm based scheduling method for automotive ethernet[C].IECON 2021-47th Annual Conference of the IEEE Industrial Electronics Society. IEEE,2021:1-5.[48]802.1CB-2017 - IEEE Standard for Local and metropolitan area networks-Frame Replication and Elimination for Reliability[S].IEEE P8021cb/d26, August. 0.[49]WG802.1.IEEE Standard for local and metropolitan area networks-bridges and bridged networks-amendment 28:per-stream filtering and policing[S]. IEEE Sts. IEEE802.1Qci-2017, 2017:1-65.[50]PAHLEVAN M,OBERMAISSER R . Redundancy management for safety-critical applications with time sensitive networking[C].201828th International Telecommunication Networks and Applications Conference (ITNAC). IEEE, 2019.[51]NAKAYAMA Y, HISANO D, KUBO T, et al. TDD-based rapid fault detection and recovery for fronthaul bridged network[J].IEEE Communications Letters, 2018:1-1.[52]PAHLEVAN M, BALAKRISHNA B, OBERMAISSER R. Simulation framework for clock synchronization in time sensitive networking[C].2019 IEEE 22nd International Symposium on Real-Time Distributed Computing (ISORC). IEEE, 2019:213-220.[53]IEEE B E . IEEE Standard for local and metropolitan area networks-virtual bridged local area networks amendment 14:stream reservation protocol (SRP)[J]. IEEE, 2010.[54]IEEE B E . IEEE Standard for local and metropolitan area networks-media access control (MAC) bridges and virtual bridged local area networks-amendment 18:enhanced transmission selection for bandwidth sharing between traffic classes[J].IEEE 2011.[55]BHM M, OHMS J, KUMAR M, et al. Dynamic real-time stream reservation for IEEE 802.1 time-sensitive networks with openflow[C]. 8th International Conference on Applied Innovation in IT.2020.[56]罗坤. 基于IEEE 802.1Qcc的时间敏感网络配置管理研究与实现[D].重庆:重庆邮电大学,2021.LUO Kun. Research and implementation of timesensitive networking configuration management based on IEEE 802.1Qcc [D].Chongqing:Chongqing University of Posts and Telecommunications, 2021.[57]BELLO,LO L. The case for ethernet in automotive communications[J]. ACM SIGBED Review, 2011, 8(4):7-15.[58]STOLZ W, WILLIAMS K, LORENZ T, et al. Ethernet and IP -the solution to master complexity, safety and security in vehicle communication networks?[C].SAE 2011 World Congress & Exhibition, 2011.[59]KU I, LU Y, CERQUEIRA E, et al. Towards Software-defined VANET:architectures and services[C]. Med-Hoc-Net. 2014.[60]朱明. 高效软件定义车载网络关键技术研究[D].长沙:国防科学技术大学,2016.ZHU Ming. Research on key technologies of high efficient software-defined vehicular networks [D]. Changsha:National University of Defense Technology, 2016.[61]HE Z, CAO J, LIU X. SDVN:enabling rapid network innovation for heterogeneous vehicular communication[J]. IEEE Network:The Magazine of Computer Communications, 2016, 30(4):10-15.[62]GE X, LI Z, LI S. 5G Software DEFINED VEHICULAR NETworks[J]. IEEE Communications Magazine:Articles, News, and Events of Interest to Communications Engineers, 2017(7).[63]CORREIA S, BOUKERCHE A, MENEGUETTE R I . An architecture for hierarchical software-defined vehicular networks[J].IEEE Communications Magazine, 2017, 55(7):80-86.[64]RAWASHDEH Z Y,MAHMUD S M. A novel algorithm to form stable clusters in vehicular ad hoc networks on highways[J]. Eurasip Journal on Wireless Communications & Networking, 2012.[65]HCKEL T, MEYER P, KORF F, et al. Software-defined networks supporting time-sensitive in-vehicular communication:IEEE, 10.1109/VTCSpring.2019.8746473[P]. 2019.[66]GERHARD T, KOBZAN T, BLOECHER I, et al. Software-defined flow reservation:configuring IEEE 802.1Q time-sensitive networks by the use of software-defined networking[C]. 24th IEEE International Conference on Emerging Technologies and Factory Automation. IEEE, 2019.[67]付朝辉,王华阳.功能架构在电子电气架构开发中的应用和实践[J]. 汽车工程,2021,43(12):1871-1879.FU Zhaohui, WANG Huayang. Application of functional architecture in electrical electronics architecture development [J]. Automotive Engineering, 2021,43(12):1871-1879.[68]孟天闯,李佳幸,黄晋,等.软件定义汽车技术体系的研究[J].汽车工程,2021,43(4):459-468.MENG Tianchuang, LI Jiaxing, HUANG Jin, et al. Study on technical system of software defined vehicles [J]. Automotive Engineering, 2021,43(4):459-468.[69]中国汽车工业协会软件工作组.软件定义汽车服务API 参考规范[M].2022.Software Working Group, China Association of Automobile Manufacturers.Software-defined vehicle service API reference specification [M]. 2022.[70]LIU Z, ZHANG W, ZHAO F. Impact, challenges and prospect of software-defined vehicles[J]. Automotive Innovation, 2022, 5(2):180-194.[71]熊志辉,李思昆,陈吉华.遗传算法与蚂蚁算法动态融合的软硬件划分[J].软件学报,2005(4):503-512.XIONG Zhihui, LI Sikun, CHEN Jihua. Hardware/software partitioning based on dynamic combination of genetic algorithm and ant algorithm [J]. Journal of Software, 2005(4):503-512.[72]罗莉,夏军,何鸿君,等.一种有效的面向多目标软硬件划分的遗传算法[J].计算机科学,2010,37(12):275-279.LUO Li, XIA Jun, HE Hongjun, et al. Effective multi-objective genetic algorithm for hardware-software partitioning [J]. Computer Science, 2010,37(12):275-279.[73]韩红蕾,刘文菊,武继刚,等.多核片上系统的高效软硬件划分及调度算法[J].计算机工程与科学,2011,33(9):57-62.HAN Honglei, LIU Wenju, WU Jigang, et al. An efficient algorithm of hardware/software partitioning and scheduling on MPSoC[J]. Computer Engineering & Science, 2011,33(9):57-62.[74]LI J. Research and implementation of hardware/software partitioning algorithms[D]. Shanghai:East China Normal School,2018.[75]MA T Y, YANG J, WANG X L. Low power hardware software partitioning algorithm for heterogeneous distributed embedded systems[C]. Embedded and Ubiquitous Computing, International Conference. IFIP, 2006:702- 711.[76]LUO J, JHA N K. Power-efficient scheduling for heterogeneous distributed real-time embedded systems[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems,2007, 26(6):1161-1170.[77]XIE G Q, CHEN Y K, LI R F, et al. Hardware cost design optimization for functional safety-critical parallel applications on heterogeneous distributed embedded systems[J]. IEEE Transactions on Industrial Informatics 2018, 14(6):2418-2431.[78]ZOU W C, LI R F, WU W F, et al. Hardware cost and energy consumption optimization for safety-critical applications on heterogeneous distributed embedded systems[C]. 24th IEEE International Conference on Parallel and Distributed Systems. IEEE,2018, 12:528-536.[79]KUGELE S, OBERGFELL P, BROY M, et al. On service-orientation for automotive software[C]. 2017 IEEE International Conference on Software Architecture (ICSA). IEEE, 2017:193-202.[80]TRAUB M, MAIER A, BARBEHÖN K L. Future automotive architecture and the impact of IT trends[J].IEEE Software,2017,34(3):27-32.[81]刘佳熙,施思明,徐振敏,等.面向服务架构汽车软件开发方法和实践[J].中国集成电路,2021,30(Z1):82-88.LIU Jiaxi, SHI Siming, XU Zhenmin, et al. Development methodology and practice of automotive software based on service oriented architecture[J]. China Integrated Circuit, 2021,30(Z1):82-88.[82]RUMEZ M, GRIMM D, KRIESTEN R, et al. An overview of automotive service-oriented architectures and implications for security countermeasures[J]. IEEE Access, 2020, 8:221852-221870.[83]汽标委智能网联汽车分标委. 车控操作系统架构研究报告[R/OL]. (2021). http://www. catarc. org. cn/upload/202109/22 /202109221130345380.pdf.Intelligent Connected Vehicle Sub-Committee of the National Technical Committee on Automobiles. Research report on vehicle control operating system architecture [R/OL]. (2021). http://www.catarc.org.cn/upload/202109/22/202109221130345380.pdf.[84]邱美涵,王晓琳,卞皓.基于AUTOSAR 的电动汽车驱动电机控制系统设计与实现[J].汽车工程,2018,40(6):659-665.QIU Meihan, WANG Xiaolin, BIAN Hao. Design and implementation of the control system for the traction motor of electric vehicles based on AUTOSAR [J]. Automotive Engineering, 2018,40(6):659-665.[85]中国汽车基础软件生态委员会(AUTOSEMO). 中国汽车基础软件发展白皮书3.0[R]. 2022.China Automotive Software Ecosystem Committee (AUTOSEMO). China automotive basic software development white paper 3.0 [R]. 2022.[86]潘妍, 张也, 周瑞坤, 等. 我国智能网联汽车操作系统研究[J]. 电子元器件与信息技术, 2022, 6(5):142-146.PAN Yan, ZHANG Ye, ZHOU Ruikun, et al. Research on operating systems for intelligent connected vehicles in China [J].Electronic Components and Information Technology, 2022, 6(5):142-146.[87]FURST S, BECHTER M. AUTOSAR for connected and autonomous vehicles:the autosar adaptive platform[C].201646th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshop (DSN-W). Toulouse, France:IEEE,2016:215-217.[88]李鲁苗, 周玮. 全球车用操作系统发展现状[J]. 汽车纵横,2022(1):39-42.LI Lumiao, ZHOU Wei. Current development status of automotive operating systems worldwide [J]. Auto Review, 2022(1):39-42.[89]单忠伟, 宋珂, 章桐. 符合AUTOSAR 规范的汽车软件开发工具链及其应用流程[J]. 机电一体化, 2018, 24(3):47-52,64.SHAN Zhongwei, SONG Ke, ZHANG Tong. Toolchain for development of automotive software based on AUTOSAR and its application process [J]. Mechatronics, 2018, 24(3):47-5264.[90]MENARD C, GOENS A, LOHSTROH M, et al. Achieving determinism in adaptive AUTOSAR[C].2020 Design, Automation &Test in Europe Conference & Exhibition (DATE). IEEE, 2020:822-827.[91]汽标委智能网联汽车分标委. 车载操作系统架构研究报告[R/OL]. (2021). http://www. catarc. org. cn/upload/202109/22/202109221131141024.pdf.Intelligent Connected Vehicle Sub-Committee of the National Technical Committee on Automobiles. Research report on in-vehicle operating system architecture [R/OL]. (2021). http://www.catarc.org.cn/upload/202109/22/202109221131141024.pdf.[92]MAENE P, GÖTZFRIED J, DE CLERCQ R, et al. Hardwarebased trusted computing architectures for isolation and attestation[J]. IEEE Transactions on Computers, 2017, 67(3):361-374.[93]RAJAN A K S, FEUCHT A, GAMER L, et al. Hypervisor for consolidating real-time automotive control units:Its procedure,implications and hidden pitfalls[J]. Journal of Systems Architecture, 2018, 82:37-48.[94]PARKER C E, WASEN J. Hypervisor implementation in vehicle networks[C].SAE Paper 2020-01-1334.转载自智能汽车设计,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --