

什么是RTC
RTC (Real Time Clock):实时时钟
RTC是个独立的定时器。RTC模块拥有一个连续计数的计数器,在相应的软件配置下,可以提供时钟日历的功能。修改计数器的值可以重新设置当前时间和日期 RTC还包含用于管理低功耗模式的自动唤醒单元。

在断电情况下 RTC仍可以独立运行 只要芯片的备用电源一直供电,RTC上的时间会一直走。
RTC实质是一个掉电后还继续运行的定时器,从定时器的角度来看,相对于通用定时器TIM外设,它的功能十分简单,只有计时功能(也可以触发中断)。但其高级指出也就在于掉电之后还可以正常运行。
两个 32 位寄存器包含二进码十进数格式 (BCD) 的秒、分钟、小时( 12 或 24 小时制)、星期几、日期、月份和年份。此外,还可提供二进制格式的亚秒值。系统可以自动将月份的天数补偿为 28、29(闰年)、30 和 31 天。
上电复位后,所有RTC寄存器都会受到保护,以防止可能的非正常写访问。
无论器件状态如何(运行模式、低功耗模式或处于复位状态),只要电源电压保持在工作范围内,RTC使不会停止工作。
RCT特征:
● 可编程的预分频系数:分频系数高为220。
● 32位的可编程计数器,可用于较长时间段的测量。
● 2个分离的时钟:用于APB1接口的PCLK1和RTC时钟(RTC时钟的频率必须小于PCLK1时钟 频率的四分之一以上)。
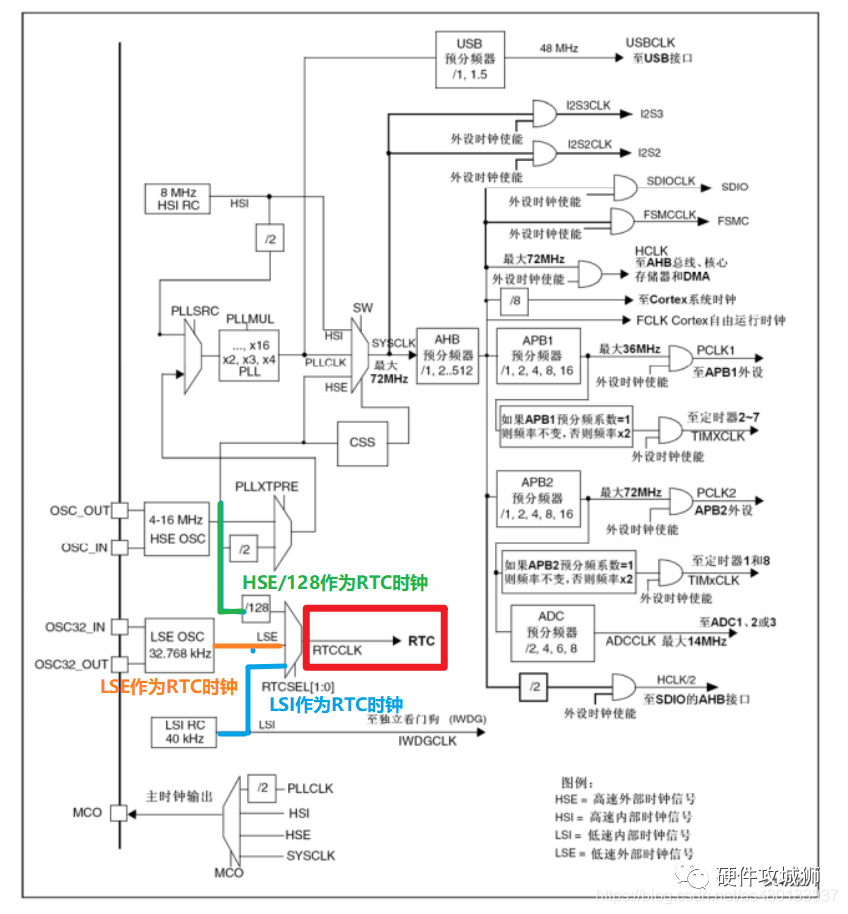
● 可以选择以下三种RTC的时钟源:
● HSE时钟除以128;
● LSE振荡器时钟;
● LSI振荡器时钟
● 2个独立的复位类型:
● APB1接口由系统复位;
● RTC核心(预分频器、闹钟、计数器和分频器)只能由后备域复位
● 3个专门的可屏蔽中断:
● 1.闹钟中断,用来产生一个软件可编程的闹钟中断。
● 2.秒中断,用来产生一个可编程的周期性中断信号(长可达1秒)。
● 3.溢出中断,指示内部可编程计数器溢出并回转为0的状态。
RTC时钟源:
三种不同的时钟源可被用来驱动系统时钟(SYSCLK):
● HSI振荡器时钟
● HSE振荡器时钟
● PLL时钟
这些设备有以下2种二级时钟源:
● 40kHz低速内部RC,可以用于驱动独立看门狗和通过程序选择驱动RTC。RTC用于从停机/待机模式下自动唤醒系统。
● 32.768kHz低速外部晶体也可用来通过程序选择驱动RTC(RTCCLK)。
RTC原理框图
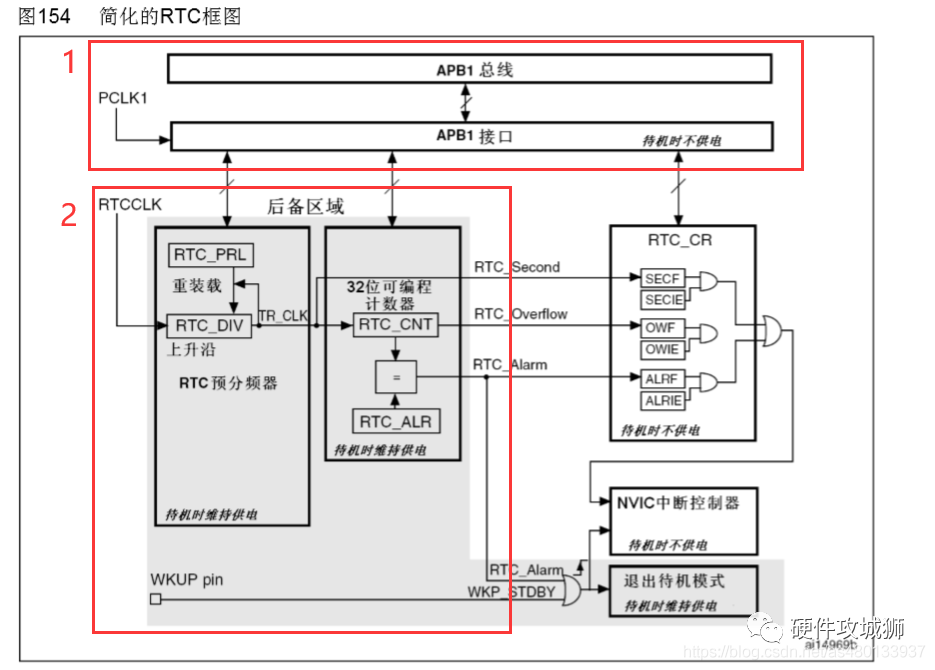
RTC时钟的框图还是比较简单的,这里我们把他分成 两个部分:
APB1 接口:用来和 APB1 总线相连。此单元还包含一组 16 位寄存器,可通过 APB1 总线对其进行读写操作。APB1 接口由 APB1 总 线时钟驱动,用来与 APB1 总线连接。
通过APB1接口可以访问RTC的相关寄存器(预分频值,计数器值,闹钟值)。
RTC 核心接口:由一组可编程计数器组成,分成 两个主要模块 。
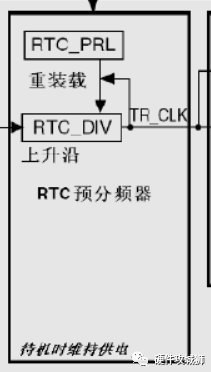
第一个模块是 RTC 的 预分频模块,它可编程产生 1 秒的 RTC 时间基准 TR_CLK。RTC 的预分频模块包含了一个 20 位的可编程分频器(RTC 预分频器)。如果在 RTC_CR 寄存器中设置了相应的允许位,则在每个 TR_CLK 周期中 RTC 产生一个中断(秒中断)。
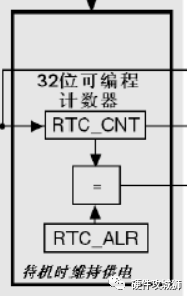
第二个模块是一个 32 位的可编程计数器 (RTC_CNT),可被初始化为当前的系统时间,一个 32 位的时钟计数器,按秒钟计算,可以记 录 4294967296 秒,约合 136 年左右,作为一般应用,这已经是足够了的。
RTC具体流程:
RTCCLK经过RTC_DIV预分频,RTC_PRL设置预分频系数,然后得到TR_CLK时钟信号,我们一般设置其周期为1s,RTC_CNT计数器计数,假如1970设置为时间起点为0s,通过当前时间的秒数计算得到当前的时间。RTC_ALR是设置闹钟时间,RTC_CNT计数到RTC_ALR就会产生计数中断,
RTC_Second为秒中断,用于刷新时间,
RTC_Overflow是溢出中断。
RTC Alarm 控制开关机
RTC时钟选择
使用HSE分频时钟或者LSI的时候,在主电源VDD掉电的情况下,这两个时钟来源都会受到影响,因此没法保证RTC正常工作。所以RTC一般都时钟低速外部时钟LSE,频率为实时时钟模块中常用的32.768KHz,因为32768 = 2^15,分频容易实现,所以被广泛应用到RTC模块。(在主电源VDD有效的情况下(待机),RTC还可以配置闹钟事件使STM32退出待机模式)。
RTC复位过程
除了RTC_PRL、RTC_ALR、RTC_CNT和RTC_DIV寄存器外,所有的系统寄存器都由系统复位或电源复位进行异步复位。
RTC_PRL、RTC_ALR、RTC_CNT和RTC_DIV寄存器仅能通过备份域复位信号复位。
系统复位后,禁止访问后备寄存器和RCT,防止对后卫区域(BKP)的意外写操作
读RTC寄存器
RTC内核完全独立于APB1接口,软件通过APB1接口对RTC相关寄存器访问。但是相关寄存器只在RTC APB1时钟进行重新同步的RTC时钟的上升沿被更新。所以软件必须先等待寄存器同步标志位(RTC_CRL的RSF位)被硬件置1才读。
配置RTC寄存器
必须设置RTC_CRL寄存器中的CNF位,使RTC进入配置模式后,才能写入RTC_PRL、
RTC_CNT、RTC_ALR寄存器。
另外,对RTC任何寄存器的写操作,都必须在前一次写操作结束后进行。可以通过查询
RTC_CR寄存器中的RTOFF状态位,判断RTC寄存器是否处于更新中。仅当RTOFF状态位是’1’
时,才可以写入RTC寄存器。
RTC时钟源
RTC是一个独立的时钟源
RTC寄存器
RTC控制寄存器 (RTC_CRH, RTC_CRL)
RTC预分频装载寄存器 (RTC_PRLH, RTC_PRLL)
RTC预分频余数寄存器 (RTC_DIVH, RTC_DIVL)
RTC计数器寄存器 (RTC_CNTH, RTC_CNTL)
RTC闹钟寄存器 (RTC_ALRH ,RTC_ALRL)
RTC控制寄存器高位——RTC_CRH 寄存器
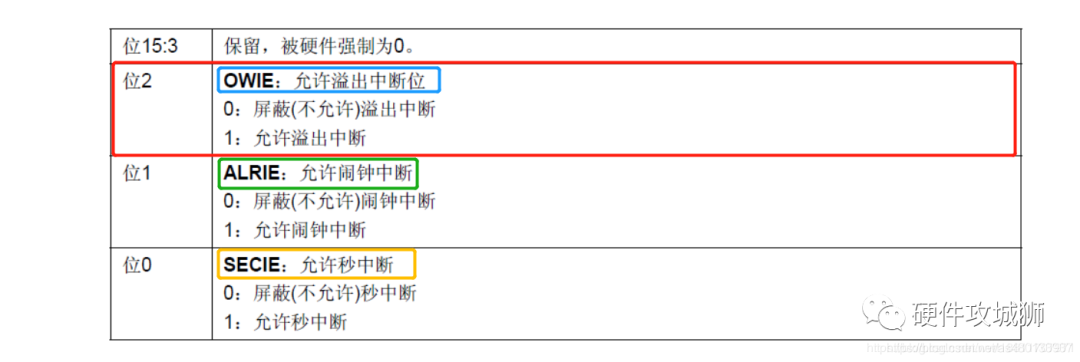
作用:配置3个专门的可屏蔽中断(溢出中断、闹钟中断、秒中断)使能。
注意:系统复位后所有的中断被屏蔽,因此可通过写RTC寄存器来
确保在初始化后没有挂起的中断请求。当外设正在完成前一次写操作时(标志位RTOFF=0),不
能对RTC_CRH寄存器进行写操作。
RTC控制寄存器低位——RTC_CRL 寄存器
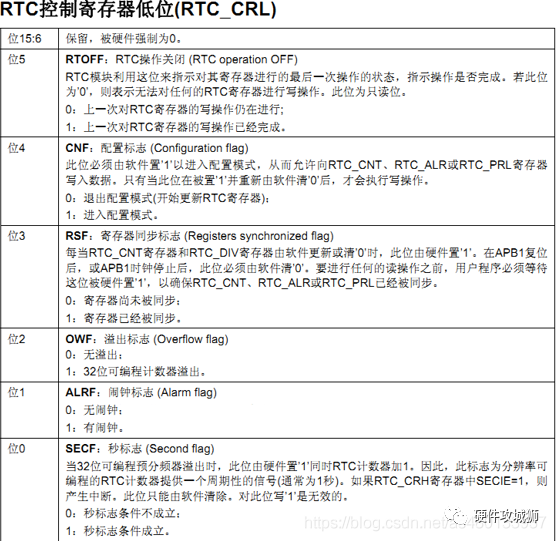
一般用到该寄存器的 3,4,5位
第 3 位为寄存器同步标志位,我们在修改控制寄存器 RTC_CRH/CRL 之前,必须先判断该位,是否已经同步了,如果没有则等待同步
第 4 位为配置标位,在软件修改 RTC_CNT/RTC_ALR/RTC_PRL 的值的时候,必须先软件置位该位,以允许进入配置模式
第 5 位为 RTC 操作位,该位由硬件操作,软件只读。通过该位可以判断上次对 RTC 寄存器的操作是否完成,如果没有,我们必须等待上一次操作结束才能开始下一次,也就是判断RTOFF位是否置位。
三个位总结如下:
① 修改CRH/CRL寄存器,必须先判断RSF位,确定已经同步。
② 修改CNT,ALR,PRL的时候,必须先配置CNF位进入配置模式,修改完之后,设置CNF位为0退出配置模式
③ **同时在对RTC相关寄存器写操作之前,必须判断上一
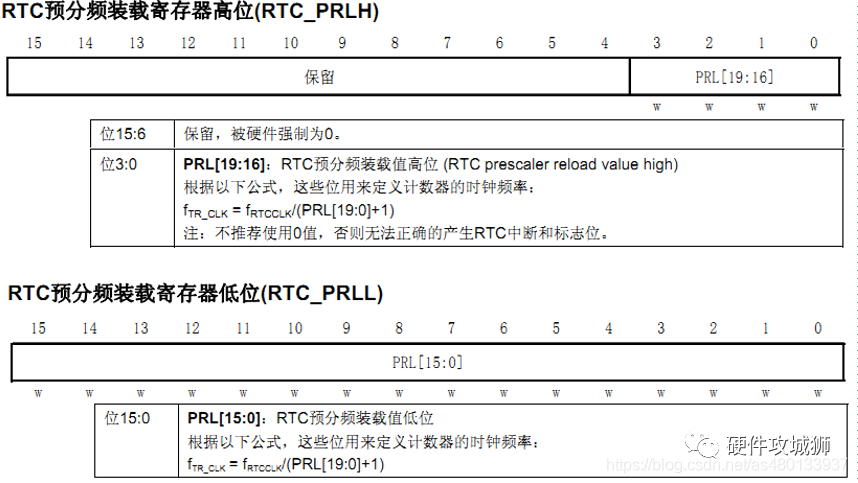
RTC 预分频装载寄存器——(RTC_PRLH/RTC_PRLL) 寄存器
作用:配置 RTC 时钟的分频数,
比如我们使用外部 32.768K 的晶振作为时钟的输入频率,那么我们要设置这两个寄存器的值为 7FFFh(32767),就可获得周期为1秒钟的信号。
RTC预分频器余数寄存器(RTC_DIVH、RTC_DIVL)
作用:和他的名字一样,获得余数,也就是获取更精确的计时,比如:0.1s ,0.01 s等
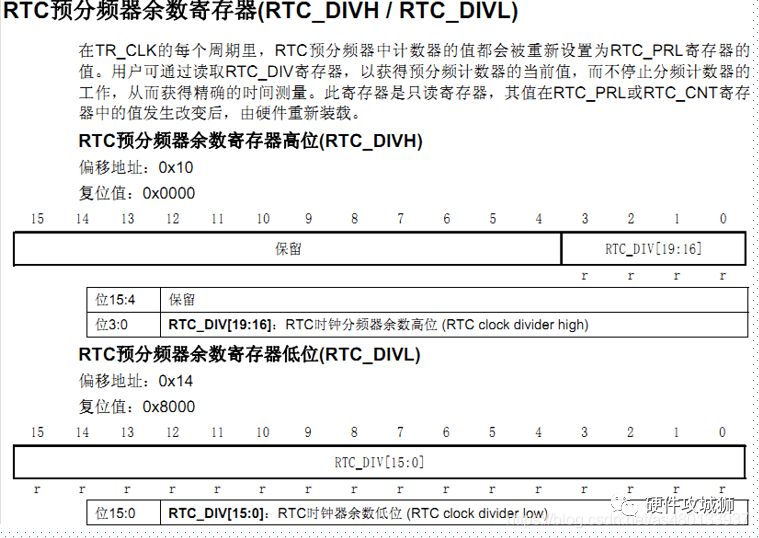
寄存器是只读寄存器,其值在RTC_PRL或RTC_CNT寄存器中的值发生改变后,由硬件重新装载。
RTC 计数器寄存器——RTC_CNTX 寄存器
作用:存放计数器内的计数值。也就是用来记录时钟时间
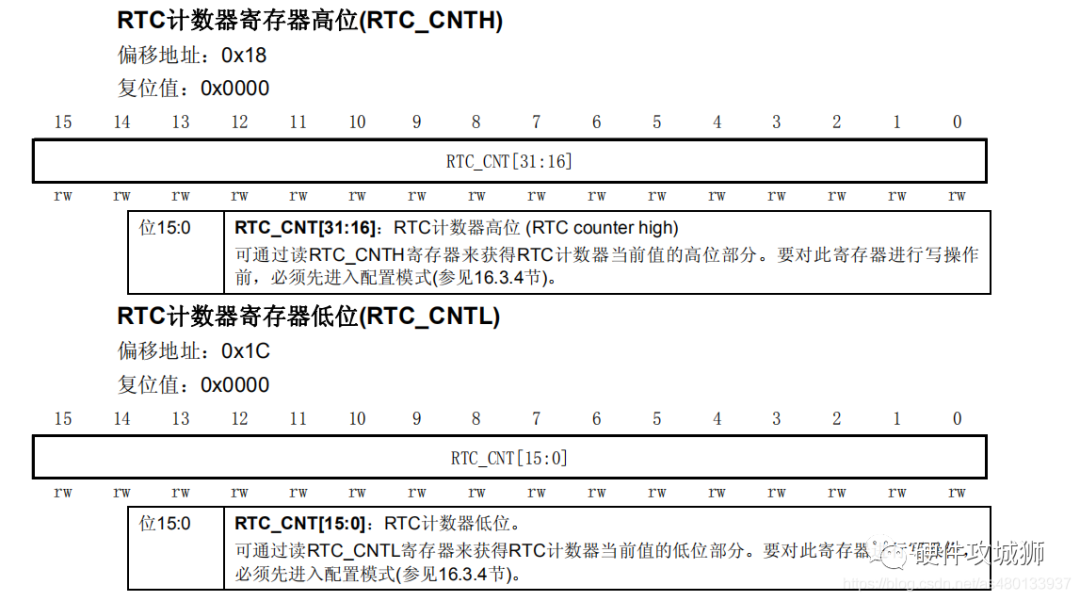
该寄存器由 2 个 16 位的寄存器组成 RTC_CNTH 和 RTC_CNTL,总共 32 位,当进行读操作时,直接返回计数器内的计数值(系统时间)
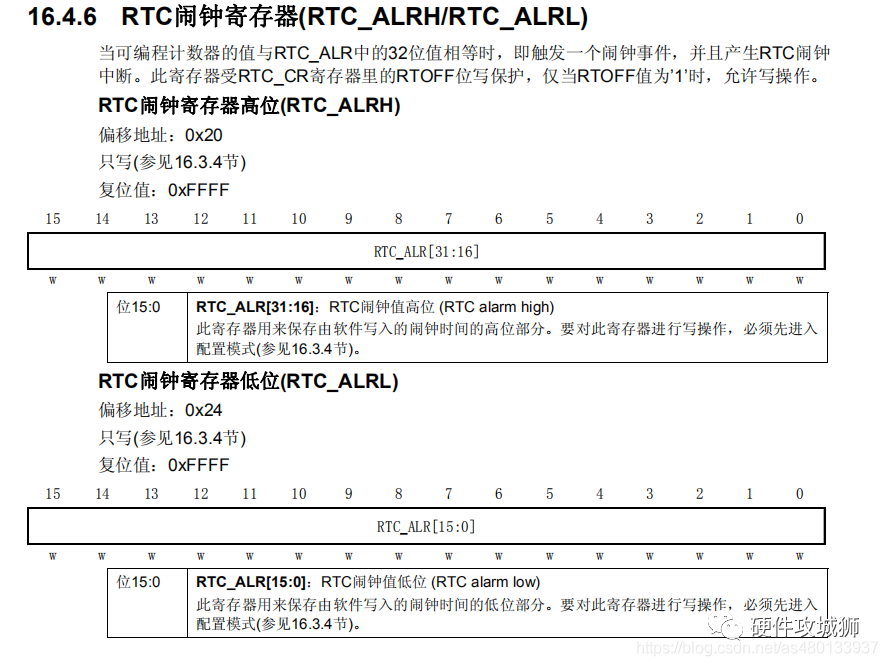
RTC 计数器寄存器——RTC 闹钟寄存器(RTC_ALRH、RTC_ALRL)
作用:RTC时钟中断控制寄存器
该寄存器也是由 2 个 16 位的寄存器组成 RTC_ALRH 和 RTC_ALRL,也就是32位,当可编程计数器的值与RTC_ALR中的32位值相等时,即触发一个闹钟事件,并且产生RTC闹钟中断。
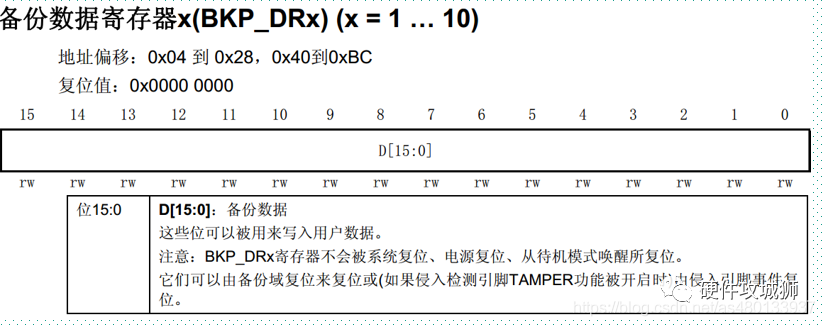
BKP备份寄存器
备份寄存器是42个16位的寄存器。可用来存储84个字节数据。
它们处在备份区域,当VDD电源切断,仍然由VBAT维持供电。
当系统在待机模式下被唤醒,或者系统复位或者电源复位,它们也不会复位。
执行以下操作将使能对后备寄存器和RTC访问:
设置寄存器RCC_APB1ENR的PWREN和BKPEN位,使能电源和后备时钟。
设置寄存器PWR_CR的DBP位,使能对RTC和后备寄存器的访问
一般用 BKP 来存储 RTC 的校验值或者记录一些重要的数据,
配置RTC寄存器:
1.查询RTOFF位,知道RTOFF的值为1.
2.置CNF值为1,进入配置模式。
3.对一个或者多个RTC寄存器进行写操作。
4.清除CNF标志位,退出配置模式。
5.查询RTOFF,直到RTOFF位变1,已确认写操作已经完成。
仅当CNF标志位被清除时,写操作才能进行,这个操作至少需要3个RTCCLK周期。
RTC相关库函数
RTC时钟源和时钟操作函数:
void RCC_RTCCLKConfig(uint32_t CLKSource);//时钟源选择
void RCC_RTCCLKCmd(FunctionalState NewState)//时钟使能
RTC配置函数(预分频,计数值):
void RTC_SetPrescaler(uint32_t PrescalerValue);//预分频配置:PRLH/PRLL
void RTC_SetCounter(uint32_t CounterValue);//设置计数器值:CNTH/CNTL
void RTC_SetAlarm(uint32_t AlarmValue);//闹钟设置:ALRH/ALRL
RTC中断设置函数:
void RTC_ITConfig(uint16_t RTC_IT, FunctionalState NewState);//CRH
RTC配置函数:
void RTC_EnterConfigMode(void);//允许RTC配置 :CRL位 CNF
void RTC_ExitConfigMode(void);//退出配置模式:CRL位 CNF
RTC同步函数:
void RTC_WaitForLastTask(void);//等待上次操作完成:CRL位RTOFF
void RTC_WaitForSynchro(void);//等待时钟同步:CRL位RSF
RTC相关状态位获取清除函数:
FlagStatus RTC_GetFlagStatus(uint16_t RTC_FLAG);
void RTC_ClearFlag(uint16_t RTC_FLAG);
ITStatus RTC_GetITStatus(uint16_t RTC_IT);
void RTC_ClearITPendingBit(uint16_t RTC_IT);
其他相关函数(BKP等)
PWR_BackupAccessCmd();//BKP后备区域访问使能
RCC_APB1PeriphClockCmd();//使能PWR和BKP时钟
RCC_LSEConfig();//开启LSE,RTC选择LSE作为时钟源
PWR_BackupAccessCmd();//BKP后备区域访问使能
uint16_t BKP_ReadBackupRegister(uint16_t BKP_DR);//读BKP寄存器
void BKP_WriteBackupRegister(uint16_t BKP_DR, uint16_t Data);//写BKP
配置RTC步骤
①使能PWR和BKP时钟:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
1
② 使能后备寄存器访问:
PWR_BackupAccessCmd(ENABLE); //使能 RTC 和后备寄存器访问
1
③复位备份区域,开启外部低速振荡器。
BKP_DeInit();//复位备份区域
1
④ 配置RTC时钟源,使能RTC时钟:
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //选择 LSE 作为 RTC 时钟(RCC_RTCCLKSource_LSI 和 RCC_RTCCLKSource_HSE_Div128)
RCC_RTCCLKCmd(ENABLE); //使能 RTC 时钟
⑤ 设置RTC预分频系数:RTC_SetPrescaler();
RTC_EnterConfigMode();/// 允许配置
RTC_SetPrescaler(32767); //设置RTC预分频的值
RTC_WaitForLastTask();//等待最近一次对RTC寄存器的写操作完成
⑥ 设置时间:RTC_SetCounter();
RTC_EnterConfigMode();/// 允许配置
void RTC_SetCounter(uint32_t CounterValue);
RTC_WaitForLastTask();//等待最近一次对RTC寄存器的写操作完成
⑦开启相关中断(可选):
void RTC_ITConfig(uint16_t RTC_IT, FunctionalState NewState);//RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能 RTC 秒中断
⑧编写中断服务函数:
RTC_IRQHandler();
⑨部分操作要等待写操作完成和同步。
RTC_WaitForLastTask();//等待最近一次对RTC寄存器的写操作完成
RTC_WaitForSynchro();//等待RTC寄存器同步
具体的代码,库函数写的太多了,我会用CubeMx配置下,用HAL库写一个例程,几十行就可以解决RTC。
https://blog.csdn.net/as480133937/article/details/105026033
定期以通俗易懂的方式分享嵌入式知识,关注公众号,加星标,每天进步一点点。
声明:
本号原创、转载的文章、图片等版权归原作者所有,如有侵权,请联系删除。
 关注、点赞、在看、转发,支持优质内容!
关注、点赞、在看、转发,支持优质内容!
