前言
近年来,智能汽车的发展极大地推动了激光雷达产业的热度,目前国内外在激光雷达领域布局的公司越来越多。激光雷达是一种发射光束并接收回波获取目标三维信息的系统,已经有着几十年的应用历史。激光雷达系统复杂,应用场景多样,多种技术路线并存,因此,对激光雷达性能的评价不是一个简单的问题,尤其是一些参数容易混淆,如探测精度、探测准确度、探测分辨率、帧频和点频等。

由于还没有统一的标准,不同厂家在宣传中选择的参数并不完全一样。实际上,并非所有的参数都是激光雷达的核心参数,还有一些参数之间存在较强的关联性。如果不能正确认识这些参数的含义、相互关系、决定因素,很可能被个别高性能指标所迷惑,而无法了解激光雷达的真实性能。
本文选择车载激光雷达的关键性能参数,对这些参数的定义、计算方法、相互关系、决定因素等进行了梳理和归纳,可以帮助用户更好地使用激光雷达,对激光雷达的设计也有指导意义。
车载激光雷达核心性能参数及分类
对车载激光雷达的评价通常涉及到性能、可靠性以及应用等方面。用户关心的参数很多,包括:激光波长、探测距离、视场角(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、防护等级、功率、供电电压、激光发射方式、使用寿命等。但激光雷达功能上是一种距离测试系统,其核心性能应围绕测试的速度、测试的空间范围、测试分辨率、测试的准确度、测试的重复度几方面来评价。依据这个原则,通常认为激光雷达的核心性能参数有帧频、最大探测距离和最小探测距离、视场角、距离分辨率、水平角分辨率、垂直角分辨率、点频以及测距精度和测距准确度。
测量准确度:达到规定测距精度的测距概率。
参数间的关系及决定因素
帧频与转速、扫描频率
转速是车载激光雷达一个很直观的参数,对于机械旋转激光雷达,转速指的是电机旋转速度,通常用每秒或每分钟转的圈数来表示。即20 r/s 表示激光雷达的电机转速是每秒钟20 圈。
激光雷达的帧频和扫描频率与转速相关,旋转一周扫描一次,扫描一次输出一帧点云。20 r/s 的转速对应的帧频和扫描频率都是20赫兹。
激光雷达电机旋转速度越快,扫描速度越快,输出点云的速度也越快。
激光雷达的最大和最小探测距离
激光雷达的探测距离是最关键的性能参数。激光测距性能方程是激光测距系统设计的理论基础,用于估算激光测距系统的最大探测距离。如图所示,激光器发出的光功率为P0,光束经过光学系统和传输距离R,被光学系统和大气衰减之后到达目标物,再从目标反射光线到达接收光路。
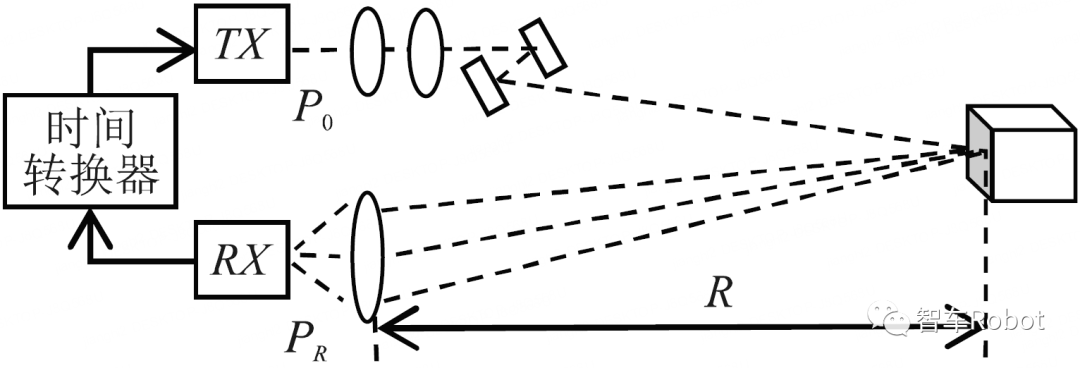
激光雷达内部光路

在公式中,目标物体的反射率被表示为ρ,发射和接收光学系统的透过率分别为TE和TR,窄带滤光片的透过率被记作TF,大气衰减率被记录为σ,目标反射表面法线与光轴之间的夹角为β,接收机透镜孔径面积为AR,目标距离为R。
根据公式的分析,我们可以得出激光测距系统的最大测程是受到外部测距条件和测距系统自身性能的双重影响。在激光测距系统的设计过程中,为了提高测程范围,必须采取一系列措施,如提升激光发射单元的发射功率、增加光学系统的透过率、增大接收单元的面积以及减小接收机的最小可探测功率PRmin。
同时,ε和γ两个系数与光斑大小、目标物体的有效发射截面积Am、发射光束的远场发散角θt和接收视场角θr之间存在着一定的关联性。
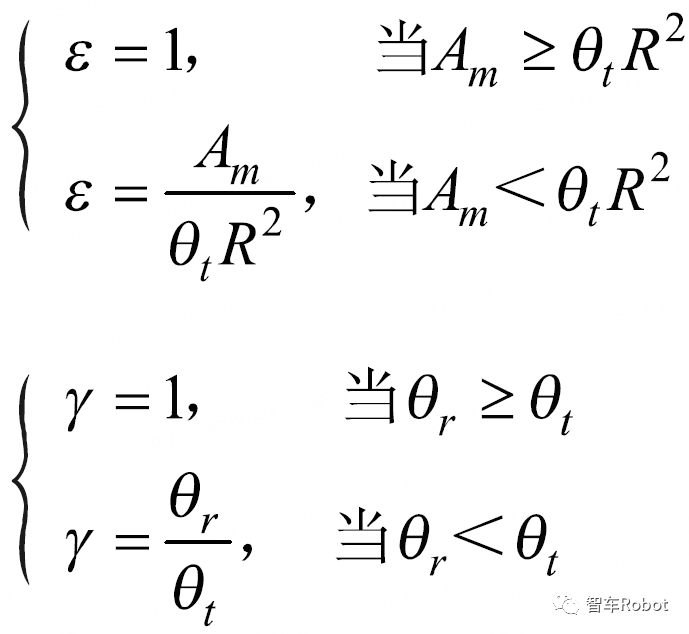
当目标物的有效发射截面积小于光斑面积时,发射光束的远场发散角会增大,导致光束发散速度加快,同时接收端接收到的光功率也会减小。因此,为了减小激光器的光束发散角和光斑大小,发射端需要通过准直整形进行优化。此外,除了最大探测距离之外,激光雷达内部发射光路与接收光路之间的距离也会导致探测盲区的产生。当探测距离低于最小探测距离时,激光雷达将无法探测到目标物。
在公式中,D 为发射准直光路中心与接收会聚光路中心的垂直距离;d 为探测器的感光区域直径;f 为所选透镜的焦距。
视场角
激光雷达的视场角是衡量其感知范围的重要指标。视场角越大,激光雷达能够感知的范围更广,对于汽车驾驶的安全性有着积极的影响。然而,并非在所有情况下视场角越大越好。例如,在相同线数的情况下,视场角增大会导致垂直角分辨率降低。因此,视场角的选择应根据具体的应用环境和使用要求进行权衡。决定视场角的主要因素包括激光雷达的扫描部分和光学设计。机械旋转扫描方式由于整个收发部分都在旋转,因此很容易实现360°的水平视场角。而转镜、棱镜和微机电系统(Micro-Electro-Mechanical System, MEMS)等扫描方式的视场角则由扫描镜对光的反射角度决定。尤其是MEMS扫描方式,由于MEMS微振镜的口径有限,激光雷达的扫描角度范围也相当有限。为了扩大视场角,可以采用凸凹透镜组成的扩角系统来进行光学扩束,从而增加视场角。
距离分辨率
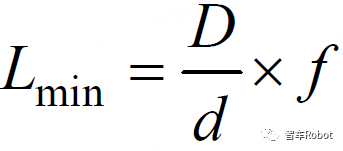
距离分辨率指的是在同一方位上,能分辨的最小距离ΔR。
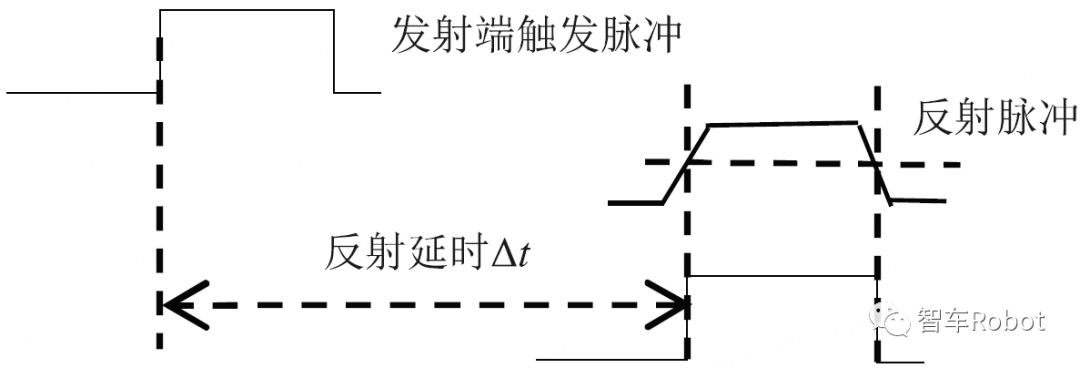
如图所示,发射脉冲的宽度为τ,当两个回波脉冲的前沿的时间间隔Δt=2ΔR/c≥τ时,两个脉冲不重叠,激光雷达可以正确分辨两个脉冲,反之两个回波脉冲重叠,激光雷达无法分辨两个物体。
回波脉冲示意图
因此,脉冲雷达中最小距离分辨率ΔR≥cτ/2。由此可见,降低脉冲宽度有利于提高激光雷达的距离分辨率。
水平角分辨率和垂直角分辨率
角度分辨率是激光雷达的关键参数,它决定了在一定距离内激光雷达能够识别的物体的大小。如图所示,假设激光雷达的垂直角分辨率为0.08°,即两个激光光束之间的角度为0.08°,那么当探测距离为200 m时,两个光束之间的距离为200 m×tan0.08°≈0.28 m。也就是说,在200 m之后,障碍物尺寸小于28 cm就有被忽略的风险。
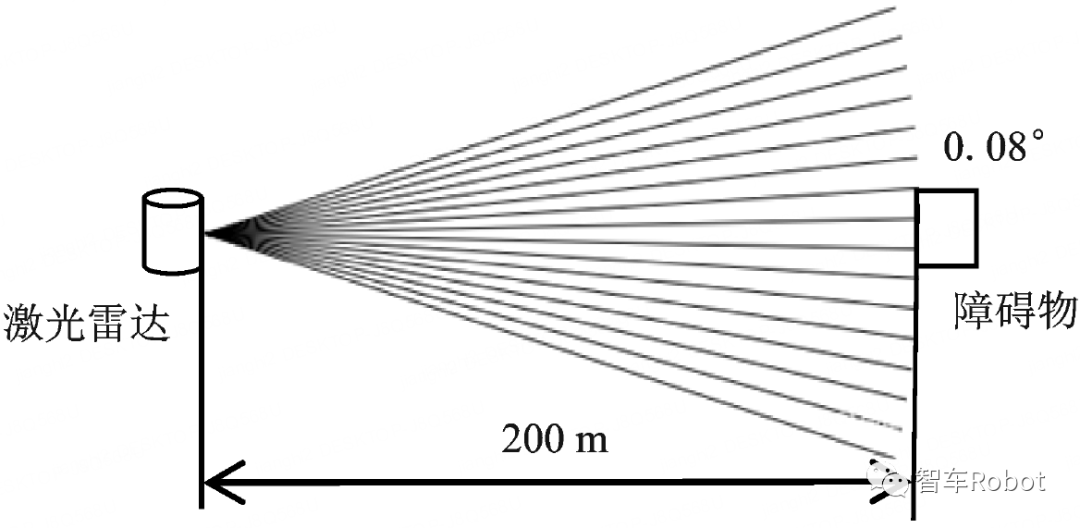
激光雷达的线束示意图
垂直角分辨率=垂直视场角/线数
为了提高线数,一维扫描方案通常通过堆叠中间区域的激光器实现,而二维扫描方案的线数分布可以任意变换,可根据需要调节感兴趣区域的角度范围和垂直分辨率大小。
水平角分辨率=视场角×转速/采样率
水平角分辨率与视场角和帧频相关,不能在不考虑这两个参数的情况下单独观察水平分辨率。相同视场角下,采样率一定的情况下,转速越慢水平角分辨率越高。
点频
点频 = 每帧水平方向平均点数 × 每帧垂直方向平均点数 × 帧频
点频 = (水平视场角 / 水平分辨率) × 线数 × 帧频 = 采样率 × 线数 × 帧频 / 转速 = 采样率 × 线数
从以上公式可以看出,点频由激光雷达的采样率和线数决定,与帧频无关。提高帧频会导致水平分辨率降低,而点频保持不变。通过利用点频参数,可以避免靠降低帧频来提高水平分辨率的取巧方法。点频是激光雷达的核心性能参数之一,点频越高意味着激光雷达对目标物的感知能力越强。
测距精度与测距准确度
测距精度和测距准确度这两个参数容易混淆。测距精度衡量的是测试的重复性,高精度意味着对同一目标的重复测量结果非常接近,低精度则表示测量结果在均值附近的离散性较大。而测距准确度反映的是测试的距离与其实际距离的接近程度偏差。
测距精度与激光雷达的信噪比密切相关。当信噪比高于一定阈值时,测距数据的分布较好地服从正态分布,随着信噪比的降低,测试数据的分布范围变大,测试精度也会下降。
测距准确度直接正比于飞行时间的准确度。如图所示,激光雷达通过比较发射和反射脉冲的时间差来计算飞行时间。
激光雷达时间差测试原理
飞行时间的准确度取决于发射、接收脉冲触发时间的准确度以及内部时钟晶振的频率稳定性。发射脉冲和时钟稳定度由激光雷达的内部电路决定,而接收脉冲触发时间准确度则与激光脉冲形状、目标物反射特性以及背景噪声等因素相关。
近年来,随着辅助驾驶车载应用场景的快速发展,激光雷达技术也在不断完善和迭代。然而,多种因素导致激光雷达性能的评价变得较为复杂。本文将对车载激光雷达的几个关键性能参数进行详细而系统的分析。通过对参数计算方法的分析,能够帮助理解不同参数之间的关系以及性能参数的决定因素。
来都来了,点个在看再走吧~~~

