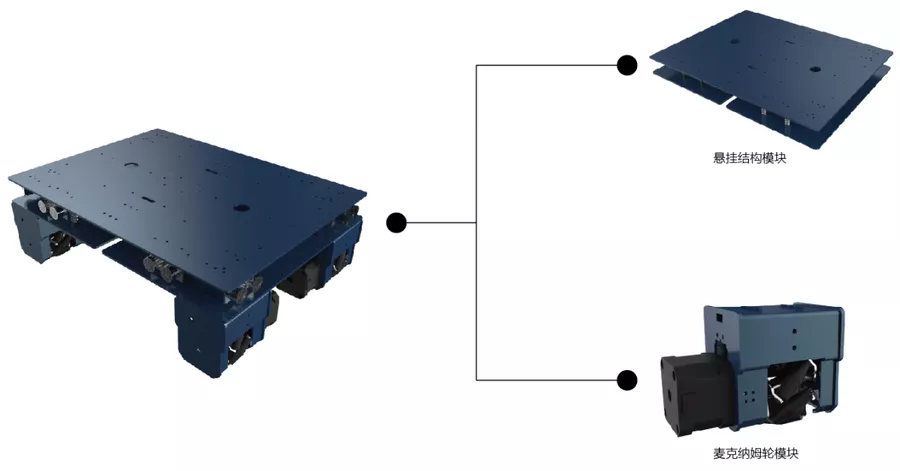
该底盘是一款模块化的桌面级应用型底盘,基于应用级软件架构设计、应用级硬件系统设计、典型应用型底盘机械系统设计。

底盘本体为一个采用半独立刚性悬挂的四驱全向底盘。
2. 软件环境介绍
操作系统:Ubuntu18.04系统。基于Debian GNU/Linux,支持x86、amd64(即x64)、ARM和ppc架构。
仿真系统:基于开源机器人操作系统ROS melodic和开源软件平台Arduino开发。上位机采用ROS melodic,基于Rviz完成全向移动底盘slam导航运动规划,采用gazebo完成全向移动底盘物理运动仿真;下位机采用Arduino实现对全向移动底盘运动的控制。
注意:准备一个外接显示器。
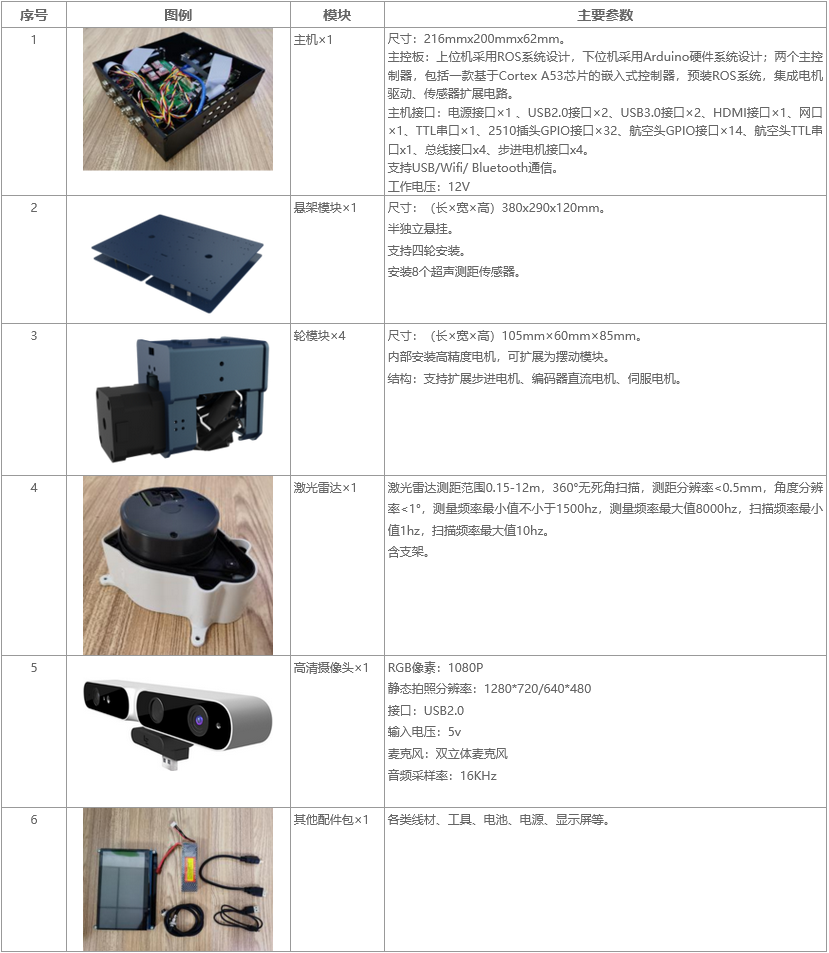
3. 硬件配置及主要参数

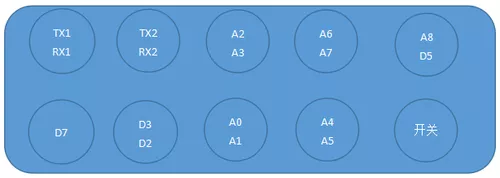
4. 认识底盘的电器接口
①常用接口说明:
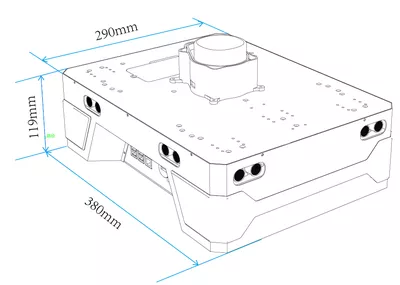
底盘尺寸示意图
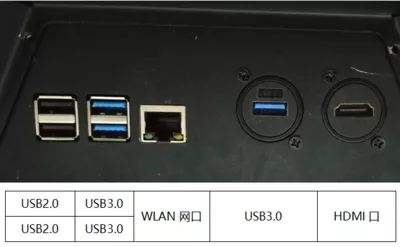
底盘常用电气接口
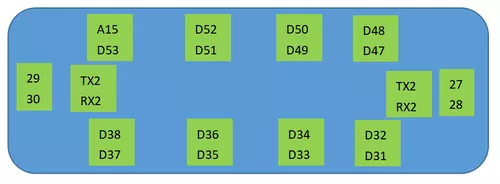
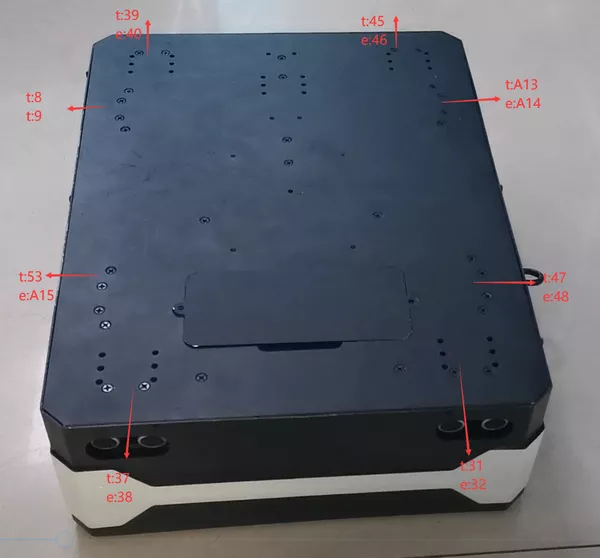
② 扩展电气接口说明:
左侧扩展接口对应图
车头扩展接口对应图
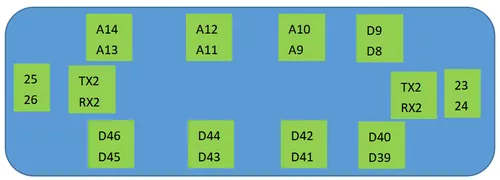
车尾扩展接口对应图
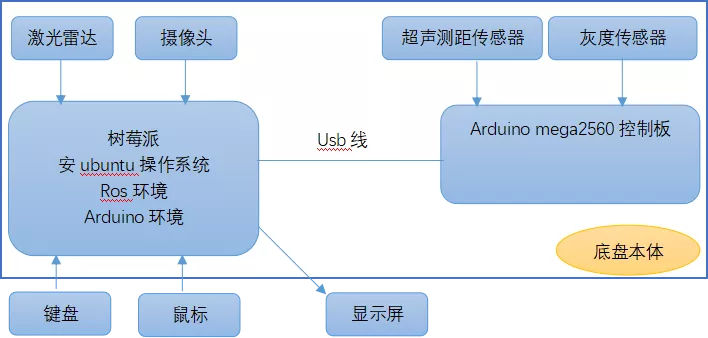
底盘的系统框图
资料内容:
①样机三维文件
②Ros基础入门学习资料
资料下载地址:桌面级全向底盘-本体说明
实现思路
控制底盘的四个轮子分别转动
下面我们先来了解一下底盘的总线舵机ID号。
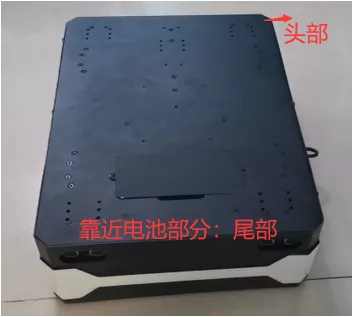
底盘的头部、尾部
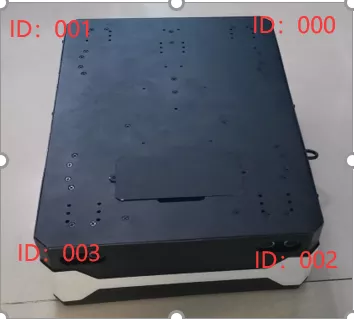
底盘上总线舵机ID号
操作步骤
① 下载文末资料中的参考程序Base_Experiment\Chassis_Drive\Control_single_bus_steering_gear\Control_single_bus_steering_gear.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-16 https://www.robotway.com/
------------------------------*/
/*
*Control single bus steering grar
*
*
///////////////////////////
* head
* ID:001 ID:000
* ___________
* | |
* | |
* | |
* | |
* | |
* | |
* |___________|
* ID:003 ID:002
* Rear end
*
* 2020.8.7 by boris
//////////////////////////
*/
#define mySerial Serial2 //Serial port used by bus steering gear
#define Serial_Baud_Rate 115200 //Serial Port baud rate
#define BusServoSerialBaud 115200 //Bus steering gear baud rate
#define wheel_speed_forward 0.08 //wheel forward speed
#define wheel_speed_back -0.08 //wheel back speed
#define wheel_speed_stop 0.0 //wheel stop speed
enum{FORWARD_LEFT=1,FORWARD_RIGHT,BACK_LEFT,BACK_RIGHT,STOP};//wheel named
void setup(){
delay(1100);Serial.begin(Serial_Baud_Rate);
mySerial.begin(BusServoSerialBaud);delay(1000);
}
void loop(){
control_bus_steering_gear_test();// control single bus steering gear
}
void control_bus_steering_gear_test()
{
Car_Move(FORWARD_LEFT,wheel_speed_forward);delay(1000);Stop_car(); //left front wheel forward
Car_Move(FORWARD_LEFT,wheel_speed_back);delay(1000);Stop_car(); //left front wheel backword
Car_Move(FORWARD_RIGHT,wheel_speed_forward);delay(1000);Stop_car(); //right front wheel forward
Car_Move(FORWARD_RIGHT,wheel_speed_back);delay(1000);Stop_car(); //right front wheel backword
Car_Move(BACK_LEFT,wheel_speed_forward);delay(1000);Stop_car(); //left rear wheel forward
Car_Move(BACK_LEFT,wheel_speed_back);delay(1000);Stop_car(); //left rear wheel backword
Car_Move(BACK_RIGHT,wheel_speed_forward);delay(1000);Stop_car(); //right rear wheel backword
Car_Move(BACK_RIGHT,wheel_speed_back);delay(1000);Stop_car(); //right rear wheel backword
}
② 将底盘轮子朝上,观察每个轮子的转动效果。
2. 底盘的基本运动
实现思路
实现底盘前进、后退、左平移、右平移、左转、右转的功能。
操作步骤
① 下载文末资料中的参考程序Base_Experiment\Chassis_Drive\Control_Car_Movement\Control_Car_Movement.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-16 https://www.robotway.com/
------------------------------*/
/*
* car action test (include:forward, back, turnleft,turnright, left translation, right translation)
*
*
* IP address of bus steering gear
* head
* ID:001 ID:000
* ___________
* | |
* | |
* | |
* | |
* | |
* | |
* |___________|
* ID:003 ID:002
* Rear end
*
* 2020.8.7 by boris
////////////////////////////////
*/
#define ActionDelayTimes 1000
#define mySerial Serial2
#define BusServoSerialBaud 115200
#define wheel_speed_forward 0.08 //car forward speed
#define wheel_speed_back -0.08 //car back speed
#define wheel_speed_stop 0.0 //car stop speed
#define wheel_speed_left 0.08 //car turnleft speed
#define wheel_speed_right -0.08 //car turnright speed
#define wheel_speed_left_translation 0.08 //speed of car left translation
#define wheel_speed_right_translation -0.08 //speed of car right translation
enum{FORWARD=1,BACK,LEFT,RIGHT,LEFT_TRANSLATION,RIGHT_TRANSLATION,STOP}; //the movement state of the car
float wheel_Speed[4]={0,0,0,0};
char cmd_return[200];
void setup()
{
delay(1000);
Serial.begin(57600);delay(1000);//open serial
mySerial.begin(BusServoSerialBaud);delay(1000);//open serial2
car_move_test();
}
void loop()
{
//car_move_test();//car action test
//car_stop();
}
void car_move_test()//car action test
{
Car_Move(FORWARD);delay(ActionDelayTimes); // forward
car_stop();
Car_Move(BACK);delay(ActionDelayTimes); // back
car_stop();
Car_Move(LEFT_TRANSLATION);delay(ActionDelayTimes); //left translation
car_stop();
Car_Move(RIGHT_TRANSLATION);delay(ActionDelayTimes);//right translation
car_stop();
Car_Move(LEFT);delay(ActionDelayTimes); //turnleft
car_stop();
Car_Move(RIGHT);delay(ActionDelayTimes); //turn right
car_stop();
}
② 观察底盘的运动情况。
资料内容:程序源代码
资料下载地址:桌面级全向底盘-驱动及控制
1. 底盘循迹-灰度传感器
实现思路
实现全向底盘可以按指定路线进行行走的功能(实验场景如下图所示)。

操作步骤
① 连接电路。如下图所示是全向底盘上的4个灰度接线,但本实验中我们只需要用到头部的两个灰度传感器即可。
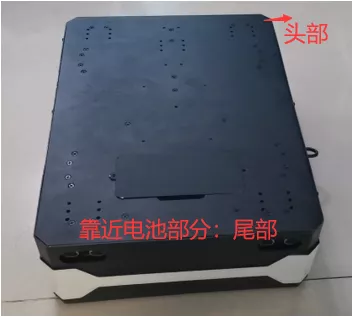
底盘的头部、尾部
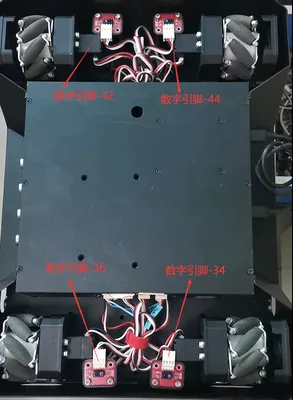
头部的灰度传感器:接42、44号引脚
② 下载文末资料中的参考程序Base_Experiment\Tracking_Car\Tracking_Car.ino:

③ 观察全向底盘循迹的效果
2. 底盘避障-超声测距
实现思路
实现全向底盘可以在模拟的场景下进行避障然后行进的功能(实验场景如下图所示)。
操作步骤
① 连接电路,如下图所示是全向底盘的8个超声测距接线图。
② 下载文末资料中的参考程序Base_Experiment\Avoiding_Obstacles_Car\Avoiding_Obstacles_Car.ino:

③ 观察全向底盘避障的效果。
资料内容:程序源代码
资料下载地址:桌面级全向底盘-传感器使用
