
一:什么是开关抖动?

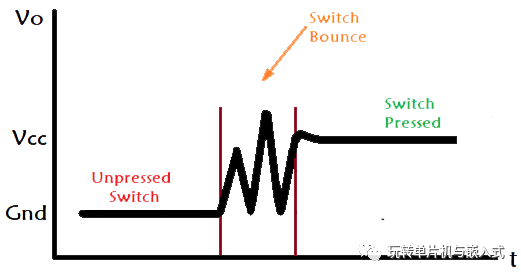
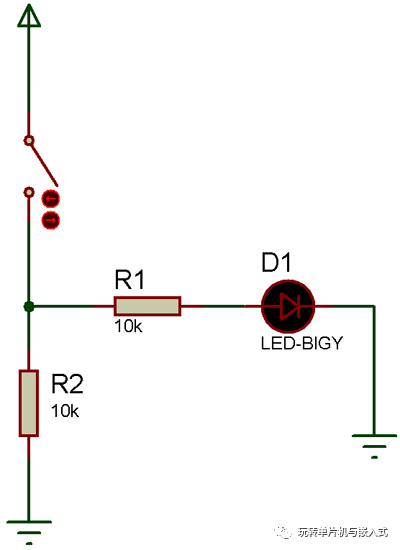
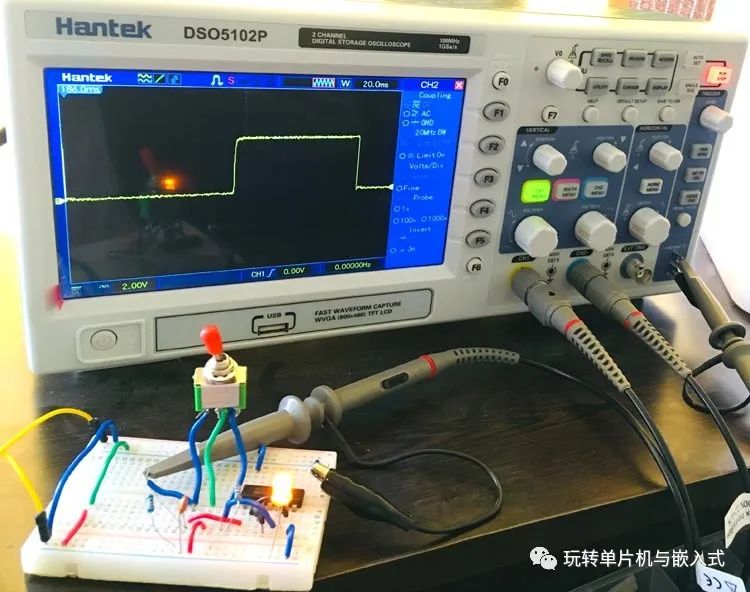
二:电路及波形
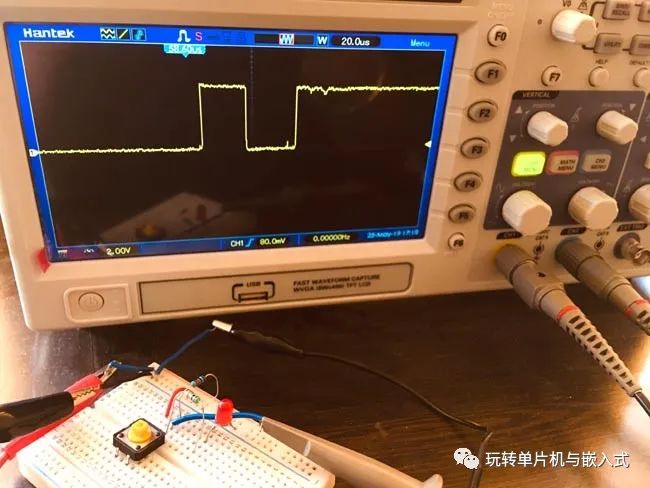
通过示波器抓取信号的波形如下:
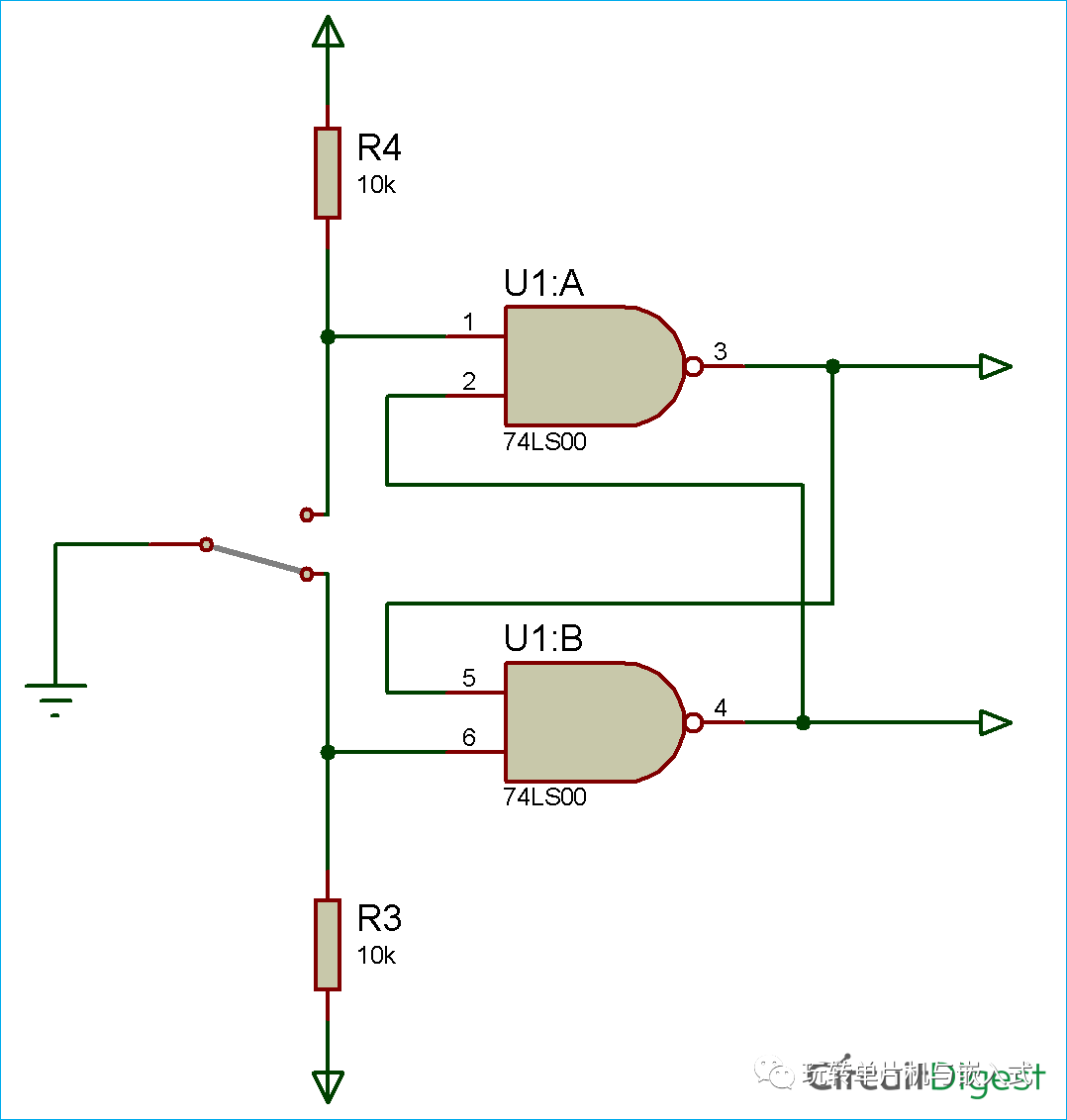
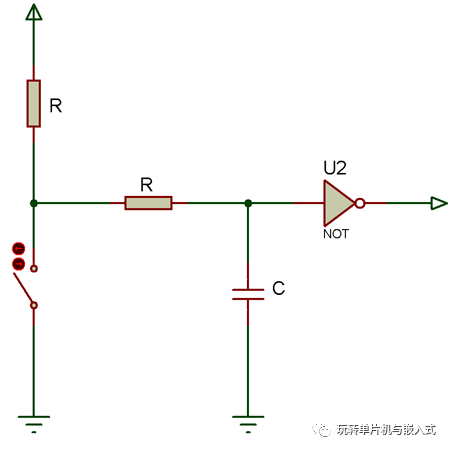
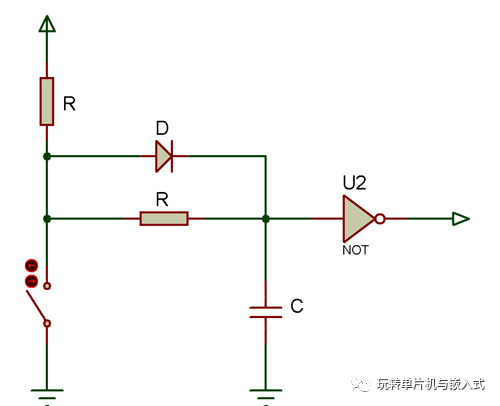
三:硬件去抖动
硬件电路去抖
R-C 去抖
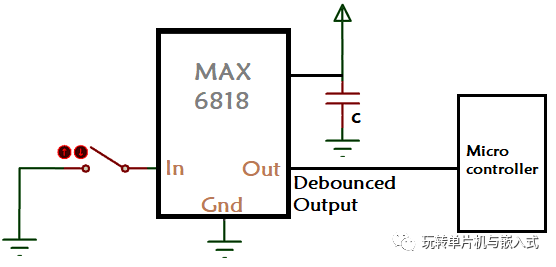
开关去抖IC
四:软件消抖
软件延时
sbit KEY = P1^3;///按键读取函数uint8_t GetKey(void){if(KEY == 1){DelayMs(20); //延时消抖if(KEY == 1){return 1;}else{return 0;}}else{return 0;}}
中断消抖
/*Configure GPIO pins : KEY_1_Pin KEY_2_Pin */GPIO_InitStruct.Pin = KEY_1_Pin|KEY_2_Pin;GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);/* EXTI interrupt init*/HAL_NVIC_SetPriority(EXTI15_10_IRQn, 5, 0);HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
static void MX_TIM1_Init(void){htim1.Instance = TIM1;htim1.Init.Prescaler = 7200 - 1; // 72000000 / 7200 = 10000 hz 0.01mshtim1.Init.CounterMode = TIM_COUNTERMODE_UP;htim1.Init.Period = 200 - 1; // 200 * 0.01 = 20mshtim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim1.Init.RepetitionCounter = 0;htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim1) != HAL_OK){_Error_Handler(__FILE__, __LINE__);}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base){if(htim_base->Instance==TIM1){/* Peripheral clock enable */__HAL_RCC_TIM1_CLK_ENABLE();/* USER CODE BEGIN TIM1_MspInit 1 */HAL_NVIC_SetPriority(TIM1_UP_IRQn,1,3);HAL_NVIC_EnableIRQ(TIM1_UP_IRQn);}}
void EXTI15_10_IRQHandler(void) // 按键的中断处理函数{HAL_TIM_Base_Start_IT(&htim1); // 开启定时器1,开始计时printf("key down\r\n");__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_11);__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_12);}
void TIM1_UP_IRQHandler(void){HAL_TIM_IRQHandler(&htim1); //这个是所有定时器处理回调的入口,在这个函数里对应定时器多种中断情况的中断回调,需要找到update的回调函数printf("TIM IRQ\r\n");}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) // 定时器update中断处理回调函数{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM2) {HAL_IncTick();}if (htim->Instance == TIM1) { // 在这里选择tim1printf("TIM1 updata\r\n");HAL_TIM_Base_Stop_IT(&htim1); // 关闭tim1 及清除中断if (GPIO_PIN_RESET == HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_11) ) //再次判断管脚的电平{printf("KEY1 be pressed!!!\r\n");}if (GPIO_PIN_RESET == HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_12) )//再次判断管脚的电平{printf("KEY2 be pressed!!!\r\n");}}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */}
End

欢迎关注我的公众号,回复【加群】限时免费进入技术交流群
(扫码进 技术开发交流群)

