

前言
二、 感知模块中的ISP模块
2.1 校正技术
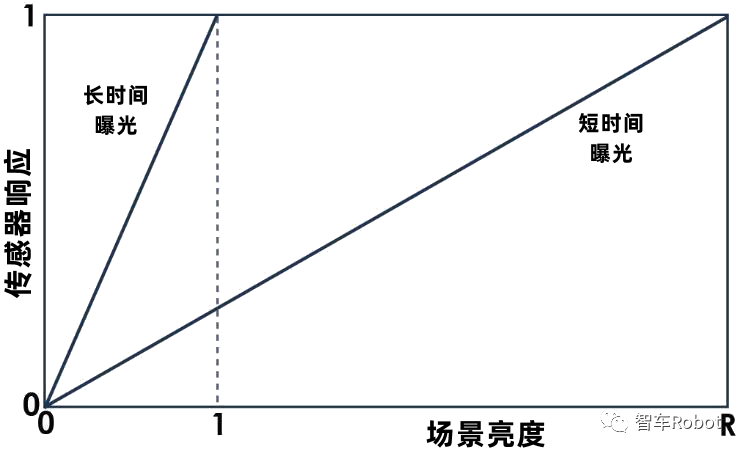
2.2 线性化(Linearization)
2.3 高动态范围合成器(HDR Combiner)
2.4 根据坐标的坏点矫正(DPC)
2.5 动态坏点检测/实时矫正
2.6 RAW去噪
2.7 时间去噪
2.8 黑电平补偿
2.9 ISP增益
2.10 白平衡(WB)增益
2.11 镜头阴影矫正
2.12 色差矫正
2.13 局部色调映射(LTM)和全局色调映射(GTM)
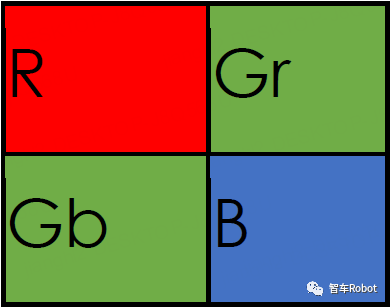
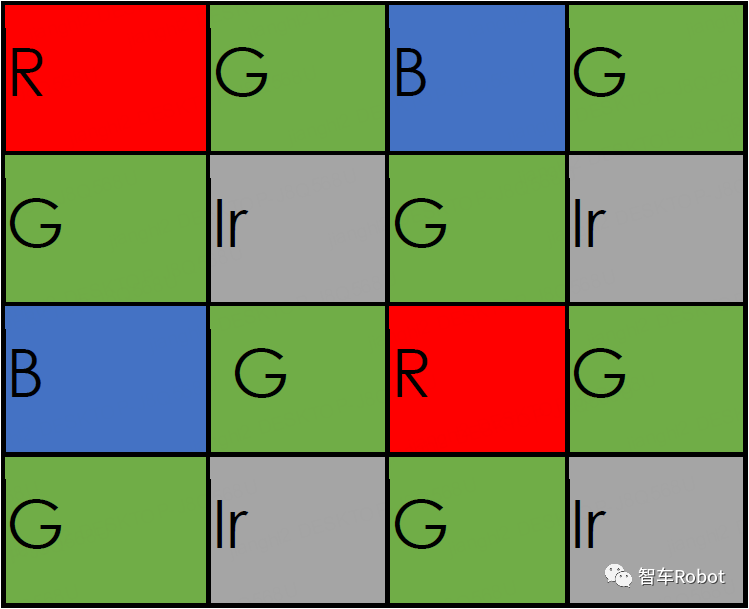
2.14 去马赛克
2.15 色彩校正矩阵(CCM)

2.16 伽马校正
2.17 颜色空间转换

2.18 Y去噪
2.19 色度降噪
2.20 锐化
2.21 ISP计量
三、 ISP延迟
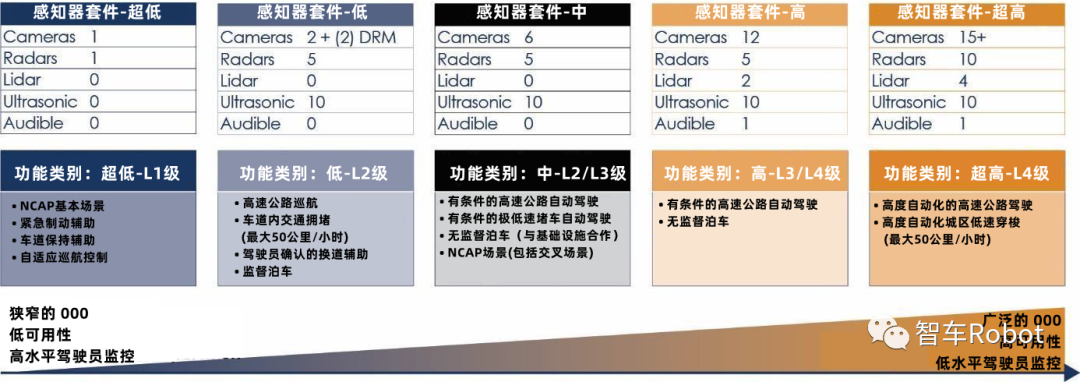
四、不同使用案例的摄像头
注意:摄像头及其参数的列表表示发布时可用的摄像头的示例。不同使用案例的摄像头规格可能会随时更改。摄像头的选择完全取决于实现者。这包括几何形状、帧速率、彩色滤波阵列、每像素位数和视场。
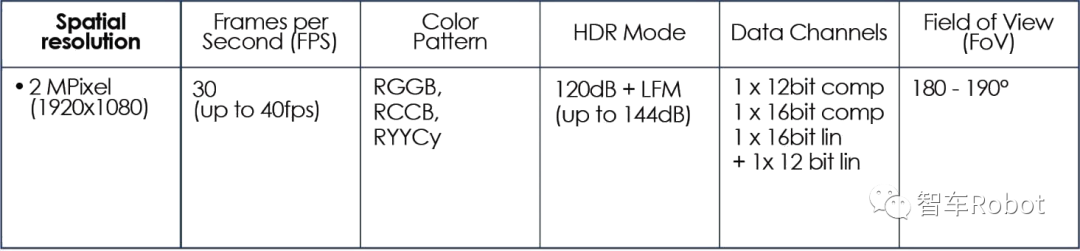
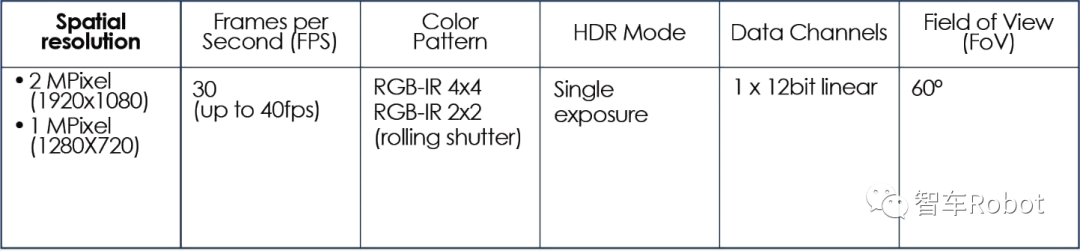
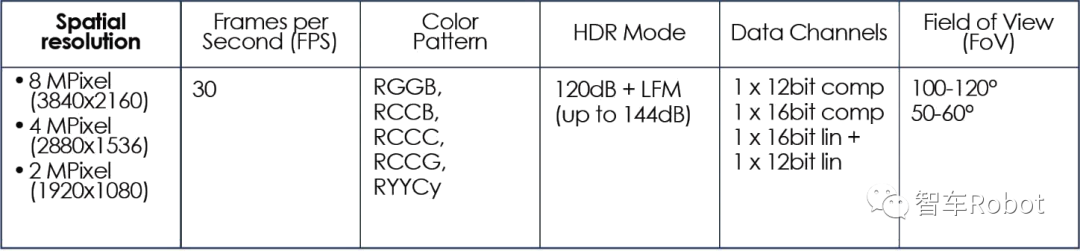
4.1 前视场摄像头
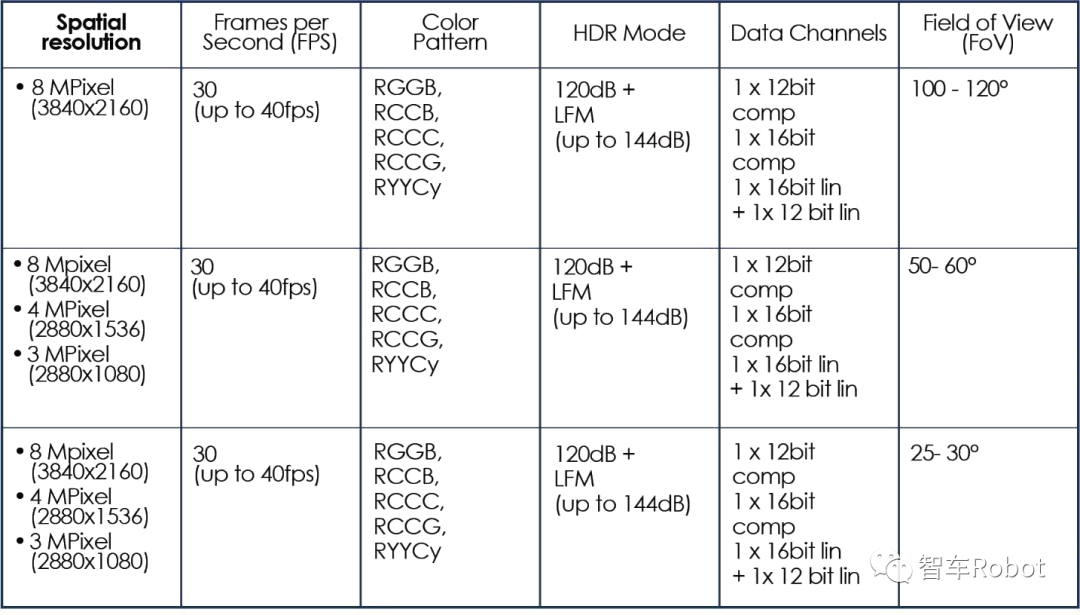
前视场摄像头参数
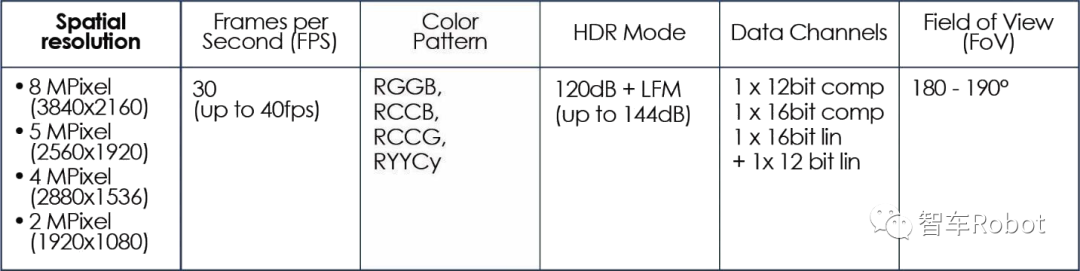
4.2 驾驶环视摄像头
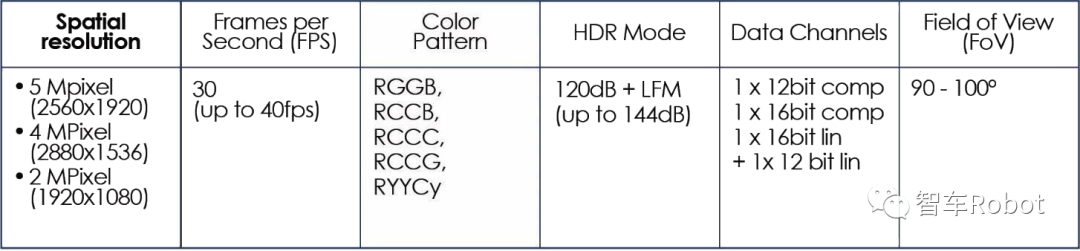
驾驶环视摄像头参数
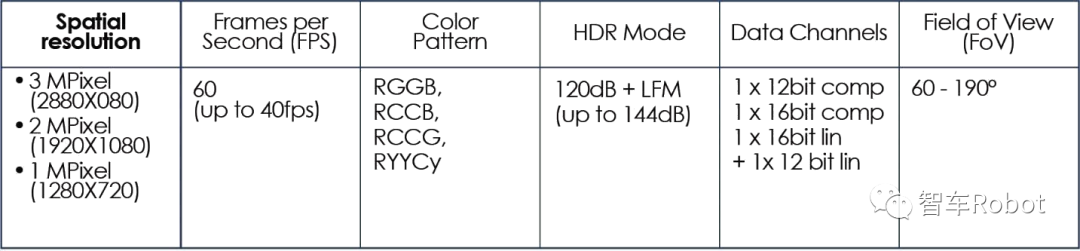
4.3 停车环视摄像头
停车环视摄像头参数
4.4 倒车摄像头
倒车摄像头参数
eMirror摄像头参数
4.5 驾驶员监控摄像头
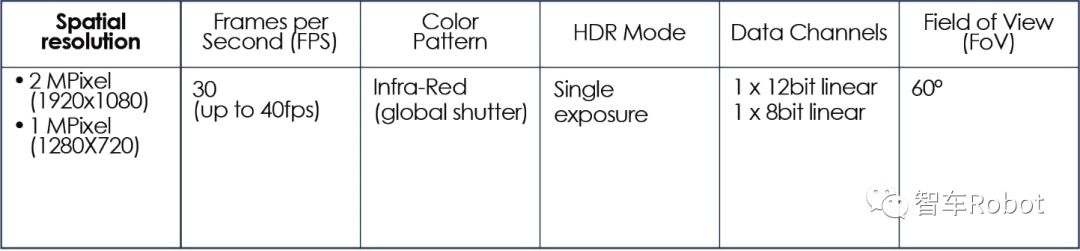
驾驶员监控摄像头参数
4.6 车厢监控
车厢监控摄像头参数
4.7 事故录像摄像头
注:事故录像可能复用其他摄像头的数据流(例如前视场或环视)
五、 摄像头到系统芯片(SoC)的输入接口
5.1 移动行业处理器接口 - 摄像头串行接口2(MIPI CSI-2)
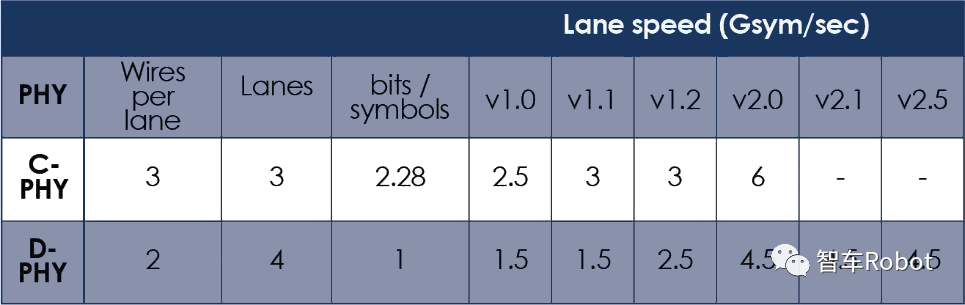
上表总结了不同MIPI-CSI PHY标准相对于每个数据通道的最大带宽。然后需要考虑这些带宽数据与每个用例的带宽需求。
5.2 远程相机连接
MIPI CSI-2 C-PHY或D-PHY连接被设计用于短距离连接(主板内)。由于相机可能远离实际接收这些数据的SoC,因此需要长距离连接。为此,采用MIPI CSI-2 A-PHY、千兆级多媒体串行链路(GMSL)或专有的Future Technology Devices Interglobal(FTDI)接口,在相机端使用串行器,在SoC端使用对应的反串行器。反串行器然后将A-PHY、GMSL或FTDI连接解码成MIPI CSI-2 C-PHY或D-PHY接口。反串行器还可以允许连接多个远程相机输入,因此可以切换多个相机到一个MIPI-CSI-2端口。这些接口完全支持先进驾驶辅助系统(ADAS)所需的高带宽、复杂互联和数据完整性。
5.3 外设组件互连Express(PCIe)
PCIe接口不提供固定的协议用于数据流,如一行的开始或结束,或者一帧的开始或结束。因此,数据的发送方和接收方需要对数据格式及各自的数据缓冲区位置进行对齐。或者,可以将MIPI CSI-2数据流语法与纯数据流一起使用,即没有给出特定的地址。目前,对这种方案还没有定义标准。
5.4 以太网
对于高速以太网通信,数据包大小起着重要作用。如果使用短数据包,数据包解析本身也可能在CPU负载上产生明显的开销,以管理以太网接口。尽管在物理层具有名义高比特率,但这是可实现带宽的一个限制。
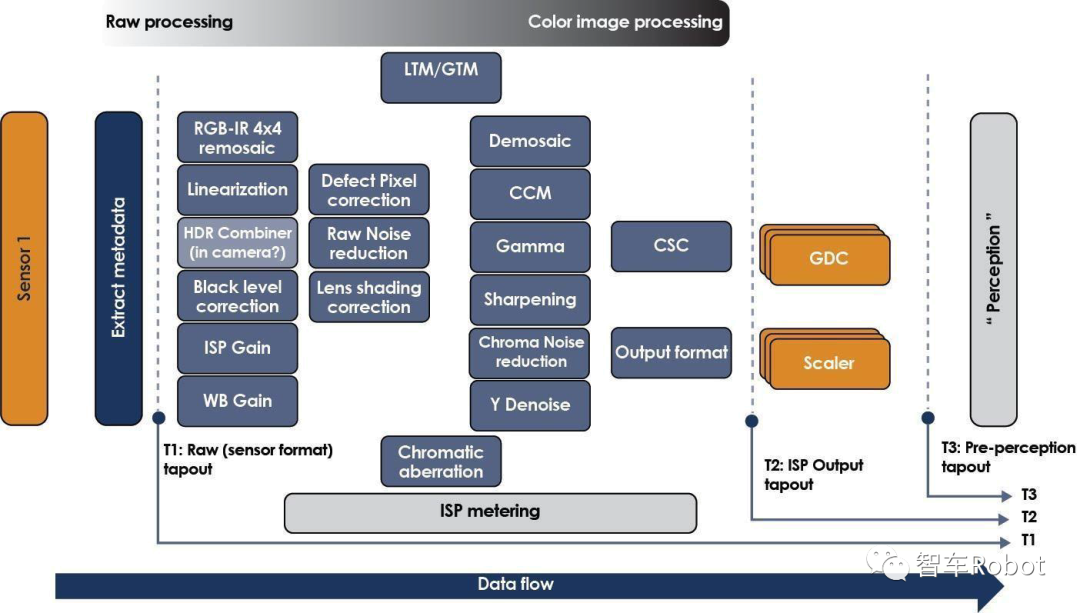
六、ISP输出
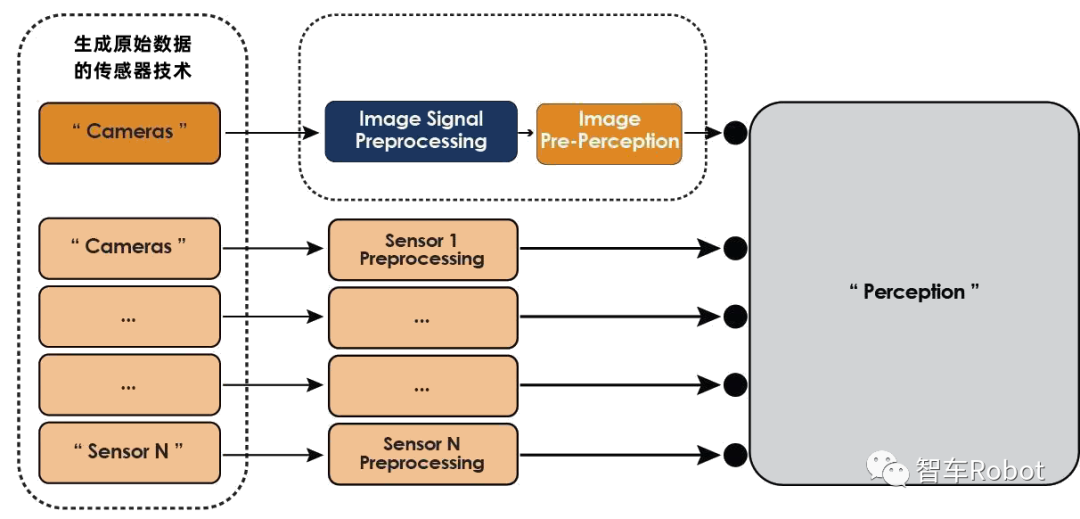
提取指的是在流程中对数据的提取,并使其可用于进一步处理。如图像处理模块图所示,ISP模块从图像传感器获取数据,并将数据传递给后续模块用于存储和/或进一步处理。系统应该为数据提供多个提取点。对于每个提取点,数据可以存储在内存中和/或流传输到后续模块。建议的提取点如下:
T1:RAW传感器数据提取。
T2:像素级函数模块之后的提取。
6.1 RAW传感器数据提取
6.2 ISP像素级函数后的提取
6.3 每个后处理模块后的提取
6.4 统计输出
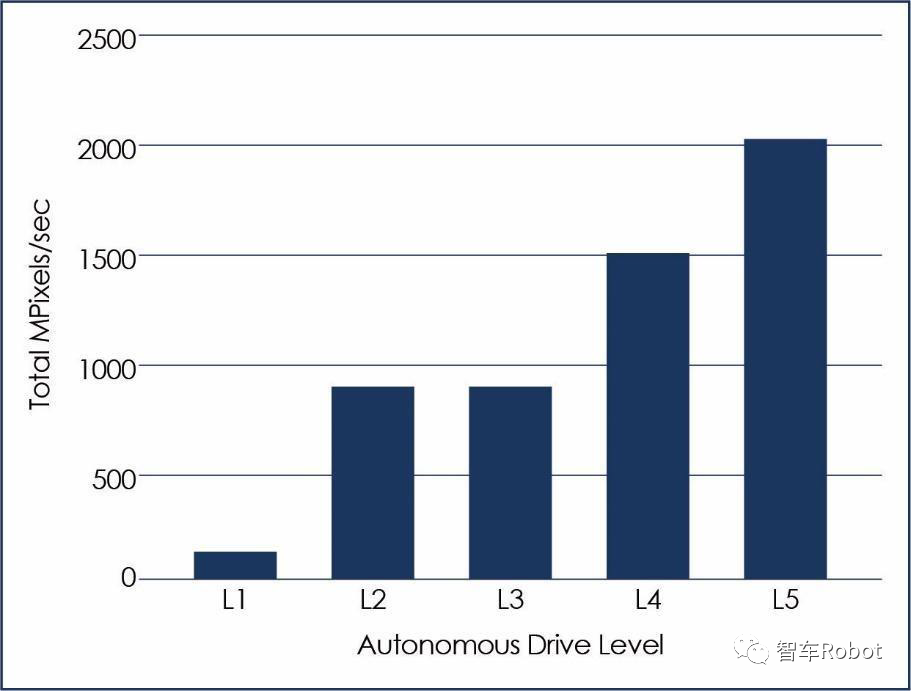
七、ISP吞吐量
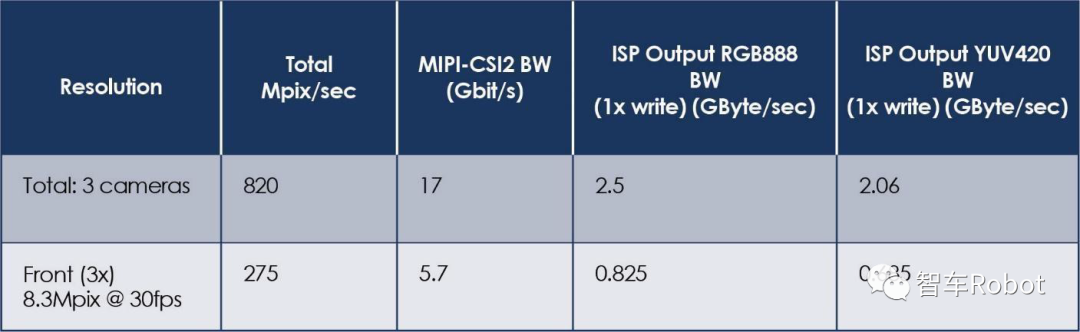
7.1 L1级系统计算
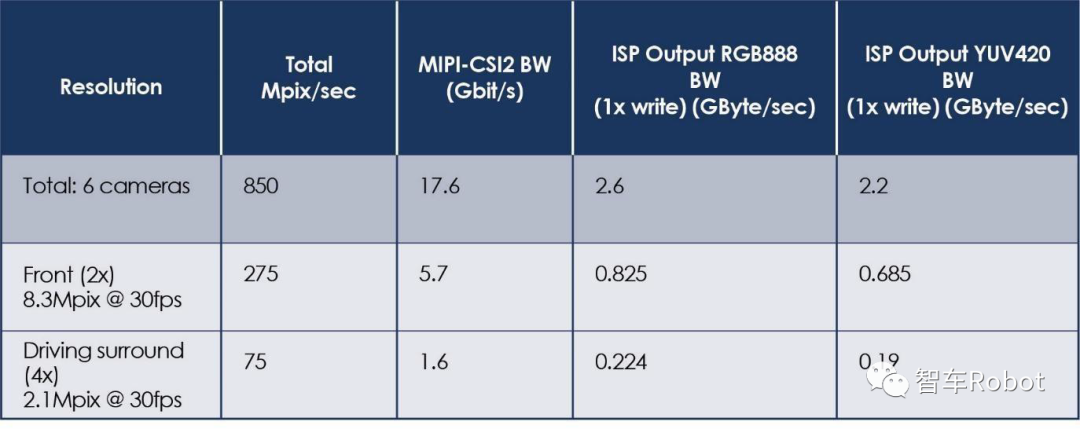
7.2 L2级系统计算
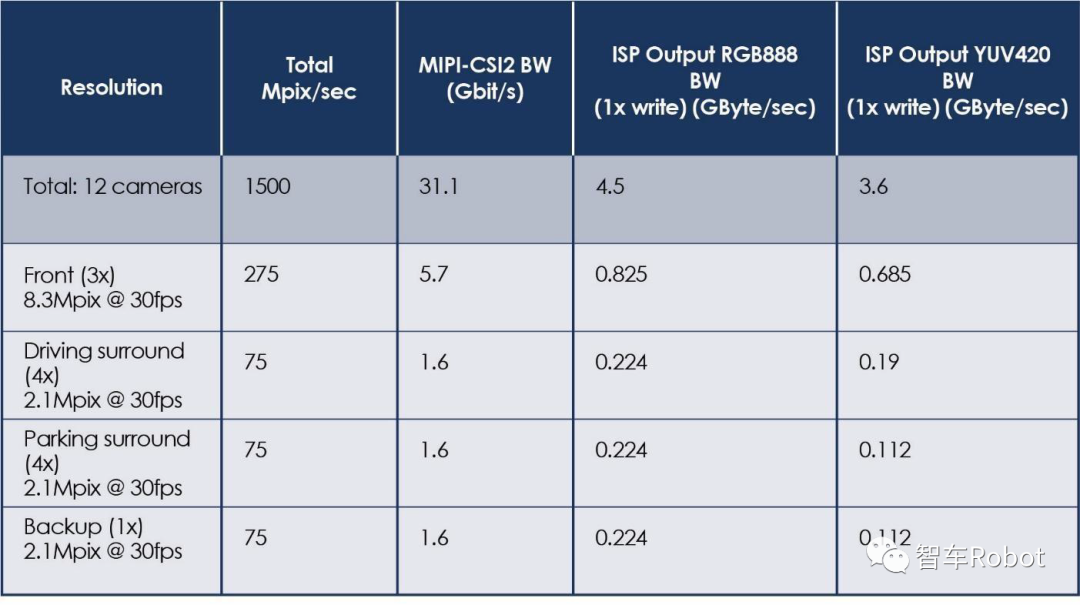
7.3 L3级系统计算
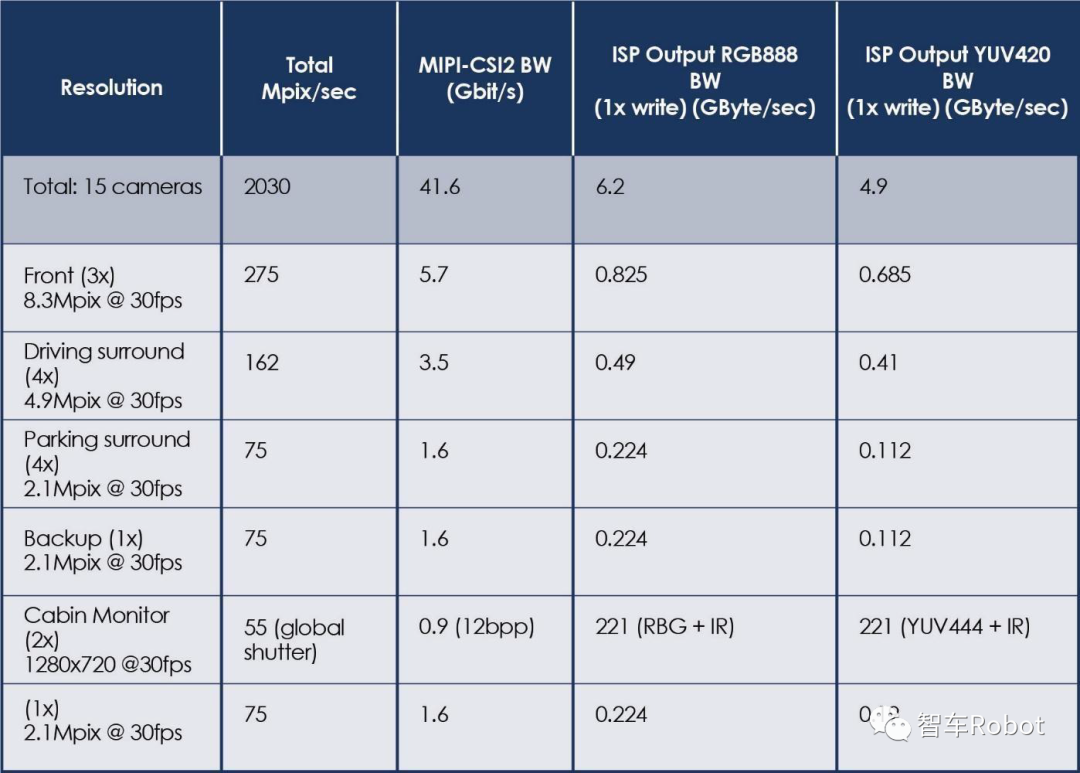
7.4 L4级系统计算
7.5 L5级系统计算
7.6 比较各级
八、ISP图像质量关键性能指标
九、行业质量标准
来都来了,点个在看再走吧~~~


