自旋锁是一种典型的对临界资源进行互斥访问的手段。
它的底层实现逻辑是:原子变量+判断检测。
原子变量我们可以理解为一把锁,通过操作原子变量(锁)的状态,并对其进行判断,如果锁未被锁定,我们就继续往下执行;如果锁已经被锁定,我们就原地自旋,直到等到锁被打开。
在ARM平台下,自旋锁的实现使用了ldrex、strex、以及内存屏障指令dmb、dsb、wfe、sev等。
SMP或者单CPU但内核可抢占的情况,对于单CPU内核不可抢占的情况时,自旋锁退化为空操作。CPU一直处于等待状态,直到该锁被释放。CPU锁死。SMP的情况下,任何一个核拿到了自旋锁,该核上的抢占调度也暂时禁止了,但是没有禁止另外一个核的抢占调度。copy_from_user()、copy_to_user()、kmalloc()和msleep(),否则会导致内核崩溃// 定义自旋锁
spinlock_t lock;
// 初始化自旋锁
spin_lock_init(&lock)
// 获得自旋锁
spin_lock(&lock) // 获取自旋锁,如果立即获得锁,则直接返回,否则,自旋等待,直到锁被释放
spin_trylock(&lock) // 尝试获取自旋锁,如果立即获得锁,返回true,否则直接返回false,不原地等待
// 释放自旋锁
spin_unlock(&lock)
自旋锁保证了不受其他CPU或者单CPU内的抢占进程的干扰,但是对于临界区代码,仍然有可能会受到中断和底半部的影响。
为了解决这种问题,我们就要使用自旋锁的衍生。
spin_lock_irq() = spin_lock() + local_irq_disable() // 获取自旋锁并关中断
spin_unlock_irq() = spin_unlock() + local_irq_enable() // 释放自旋锁并开中断
spin_lock_irqsave() = spin_lock() + local_irq_save() // 获取自旋锁并关中断,保存中断状态
spin_unlock_irqrestore() = spin_unlock() + local_irq_restore()//释放自旋锁,开中断并恢复中断状态
spin_lock_bh() = spin_lock() + local_bh_disable() // 获取自旋锁并关底半部中断
spin_unlock_bh() = spin_unlock() + local_bh_enable() // 释放自旋锁并发开底半部中断
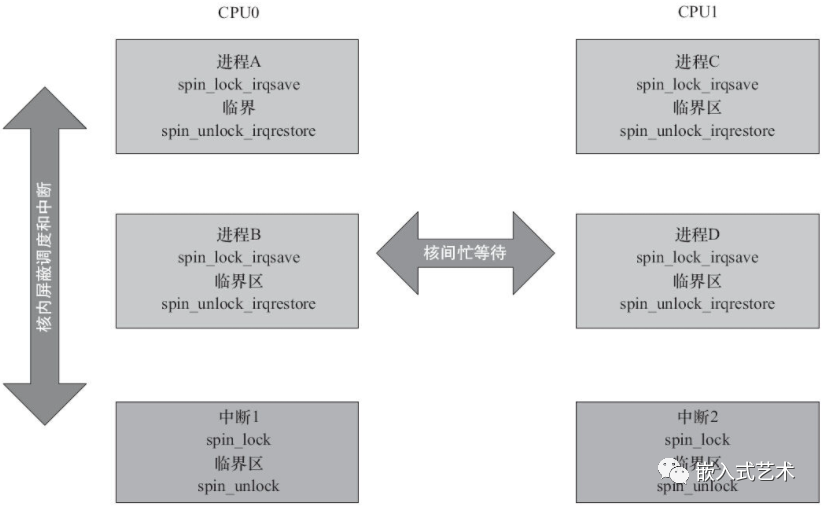
当我们的临界区代码,有可能被进程或者中断访问时,就需要在进程上下文中,调用spin_lock_irqsave()、spin_unlock_irqrestore(),在中断上下文中调用spin_lock()、spin_unlock(),如下图:
typedef struct spinlock {
union {
struct raw_spinlock rlock;
#ifdef CONFIG_DEBUG_LOCK_ALLOC
# define LOCK_PADSIZE (offsetof(struct raw_spinlock, dep_map))
struct {
u6 __padding[LOCK_PADSIZE];
struct lockdep_map dep_map;
};
#endif
};
} spinlock_t;
typedef struct raw_spinlock {
arch_spinlock_t raw_lock;
#ifdef CONFIG_DEBUG_SPINLOCK
unsigned int magic, owner_cpu;
void *owner;
#endif
#ifdef CONFIG_DEBUG_LOCK_ALLOC
struct lockdep_map dep_map;
#endif
} raw_spinlock_t;
typedef struct {
union {
u32 slock;
struct __raw_tickets {
#ifdef __ARMEB__
u16 next;
u16 owner;
#else
u16 owner;
u16 next;
#endif
} tickets;
};
} arch_spinlock_t;
结构体名称:spinlock_t、raw_spinlock、arch_spinlock_t
文件位置:include/linux/spinlock.h、arch/arm/include/asm/spinlock_types.h
主要作用:结构体层层嵌套,用于定义一个自旋锁。
slock:32位无符号整形数据,用于锁的控制
__raw_tickets:union类型,用于基于票证锁算法的自旋锁。
每个线程进入代码段时,会尝试获取自旋锁,如果获取失败,它们会在锁的等待队列中排队。然后,等待队列中的线程会按照优先级顺序依次抢占锁的拥有权,直到某个线程成功获取自旋锁并执行完关键代码,释放锁资源为止。
owner :表示当前持有自旋锁的线程的索引next :表示下一个等待获取自旋锁的线程的索引这里使用的
union联合体,其共享内存空间,其具体区别可看下面:
struct与union区别:https://blog.csdn.net/lishuo0204/article/details/118957959
#define spin_lock_init(_lock) \
do { \
spinlock_check(_lock); \
raw_spin_lock_init(&(_lock)->rlock); \
} while (0)
static __always_inline raw_spinlock_t *spinlock_check(spinlock_t *lock)
{
return &lock->rlock;
}}
# define raw_spin_lock_init(lock) \
do { *(lock) = __RAW_SPIN_LOCK_UNLOCKED(lock); } while (0)
#define __RAW_SPIN_LOCK_UNLOCKED(lockname) \
(raw_spinlock_t) __RAW_SPIN_LOCK_INITIALIZER(lockname)
#define __RAW_SPIN_LOCK_INITIALIZER(lockname) \
{ \
.raw_lock = __ARCH_SPIN_LOCK_UNLOCKED, \
SPIN_DEBUG_INIT(lockname) \
SPIN_DEP_MAP_INIT(lockname) }
#define __ARCH_SPIN_LOCK_UNLOCKED { { 0 } }
函数名称:spin_lock_init
文件位置:include/linux/spinlock.h
主要作用:初始化自旋锁
函数调用流程:
// spin_lock_init
spin_lock_init(include/linux/spinlock.h)
|--> spinlock_check // 对锁进行检查,判断是否存在
|--> raw_spin_lock_init // 初始化锁
|--> __RAW_SPIN_LOCK_UNLOCKED(include/linux/spinlock_types.h)
|--> __RAW_SPIN_LOCK_INITIALIZER // 将锁初始为__ARCH_SPIN_LOCK_UNLOCKED未上锁状态
上述函数主要通过宏定义给变量.raw_lock = __ARCH_SPIN_LOCK_UNLOCKED赋值,初始化为0,即为未上锁的状态;并且提供了两个调试接口:CONFIG_DEBUG_SPINLOCK、CONFIG_DEBUG_LOCK_ALLOC,默认为关闭。
这里面有个关于spinlock_check存在的意义的讨论,感兴趣的可以看一下:https://stackoverflow.com/questions/52551594/spinlock-initialization-function
static __always_inline void spin_lock(spinlock_t *lock)
{
raw_spin_lock(&lock->rlock);
}
#define raw_spin_lock(lock) _raw_spin_lock(lock)
#ifndef CONFIG_INLINE_SPIN_LOCK
void __lockfunc _raw_spin_lock(raw_spinlock_t *lock)
{
__raw_spin_lock(lock);
}
EXPORT_SYMBOL(_raw_spin_lock);
#ifndef CONFIG_INLINE_SPIN_LOCK
void __lockfunc _raw_spin_lock(raw_spinlock_t *lock)
{
__raw_spin_lock(lock);
}
EXPORT_SYMBOL(_raw_spin_lock);
static inline void __raw_spin_lock(raw_spinlock_t *lock)
{
preempt_disable();
spin_acquire(&lock->dep_map, 0, 0, _RET_IP_);
LOCK_CONTENDED(lock, do_raw_spin_trylock, do_raw_spin_lock);
}
#define preempt_disable() \
do { \
preempt_count_inc(); \
barrier(); \
} while (0)
#define LOCK_CONTENDED(_lock, try, lock) \
lock(_lock)
static inline void do_raw_spin_lock(raw_spinlock_t *lock) __acquires(lock)
{
__acquire(lock);
arch_spin_lock(&lock->raw_lock);
}
static inline void arch_spin_lock(arch_spinlock_t *lock)
{
unsigned long tmp;
u32 newval;
arch_spinlock_t lockval;
prefetchw(&lock->slock);
__asm__ __volatile__(
"1: ldrex %0, [%3]\n"
" add %1, %0, %4\n"
" strex %2, %1, [%3]\n"
" teq %2, #0\n"
" bne 1b"
: "=&r" (lockval), "=&r" (newval), "=&r" (tmp)
: "r" (&lock->slock), "I" (1 << TICKET_SHIFT)
: "cc");
while (lockval.tickets.next != lockval.tickets.owner) {
wfe();
lockval.tickets.owner = READ_ONCE(lock->tickets.owner);
}
smp_mb();
}
函数名称:spin_lock
文件位置:include/linux/spinlock.h
主要作用:用于在进程或线程首次尝试获取锁的时候进行自旋,不停地检查锁的状态,如果锁已经被其他进程或线程占用,则自旋等待,直到锁被释放。
函数调用流程:
// spin_lock
spin_lock(include/linux/spinlock.h)
|--> raw_spin_lock
|--> _raw_spin_lock(include/linux/spinlock_api_smp.h)
|--> __raw_spin_lock
|--> __raw_spin_lock
|--> preempt_disable
|--> preempt_count_inc
|--> barrier
|--> spin_acquire
|--> LOCK_CONTENDED
|--> do_raw_spin_lock
|--> arch_spin_lock(arch/arm/include/asm/spinlock.h)
实现流程:
preempt_disable(); 禁用内核抢占,确保当前 CPU 执行该代码时不会被其他进程或线程抢占。
preempt_count_inc增加抢占计数器的值,通过抢占计数器来实现对任务的执行顺序进行管理。barrier来确保前面的操作完成后再继续执行后面的代码。spin_acquire(&lock->dep_map, 0, 0, _RET_IP_); 通过调用 spin_acquire() 函数获取自旋锁,用于保护共享资源不被两个、或者多个线程所修改。
spin_acquire是lockdep工具的一部分,主要用于动态检测死锁。lock->dep_map是锁的依赖地图,_RET_IP_是调用者的返回地址。这两个参数都是用于lockdep的调试信息。lockdep是一个强大的锁调试工具,它可以跟踪锁的所有获取和释放,并动态地检测可能的死锁情况。LOCK_CONTENDED(lock, do_raw_spin_trylock, do_raw_spin_lock); 实际为调用do_raw_spin_lock函数来实现获取锁并自旋的操作。
下面为arch_spin_lock汇编代码分析:
prefetchw(&lock->slock) 函数用于提前加载锁的地址到处理器缓存中,从而提高锁的获取效率。
ldrex %0, [%3] 用于以原子方式读取锁的值到寄存器 %0 中,%3 为锁的地址。
add %1, %0, %4用于将当前获取锁的 CPU 分配的新值加上原锁值 %0 以及%4 固定常量,结果存放在%1新值中。
strex %2, %1, [%3] 用于以原子方式将更新的值 %1 写入锁的地址所指定的内存位置,%2 为写入结果。
这里解释一下为什么要做
add处理:由
spinlock_t的结构体可知,是由联合体组成,并且可以通过owner和next两个字段访问,next在高16位,owner在低16位。这里上锁的操作,是将其值设置为
1 << TICKET_SHIFT,也就是高16位,即next字段设置为1,表示下一个等待获取自旋锁的线程的索引。
teq %2, #0:用于测试写入结果 %2 是否为0,如果为0,表示锁获取成功,反之则跳转到标签1b处执行。
当获取锁成功之后,程序会执行 while 循环,不断等待锁的所有权被赋予当前 CPU, 直到锁的所有权的拥有者持有锁为止。
smp_mb() 函数执行一条内存屏障,确保所有关键数据的顺序性已经刷新到内存中。
综上,spin_lock代码的作用是获取自旋锁,让当前线程获得临界资源的控制权,避免多个线程同时修改共享资源而造成数据冲突。同时,通过禁用内核抢占和使用内联函数优化的方式,保证了原子操作的执行效率和可靠性。
static __always_inline void spin_unlock(spinlock_t *lock)
{
raw_spin_unlock(&lock->rlock);
}
#define raw_spin_unlock(lock) _raw_spin_unlock(lock)
void __lockfunc _raw_spin_unlock(raw_spinlock_t *lock)
{
__raw_spin_unlock(lock);
}
static inline void __raw_spin_unlock(raw_spinlock_t *lock)
{
spin_release(&lock->dep_map, 1, _RET_IP_);
do_raw_spin_unlock(lock);
preempt_enable();
}
static inline void do_raw_spin_unlock(raw_spinlock_t *lock) __releases(lock)
{
arch_spin_unlock(&lock->raw_lock);
__release(lock);
}
static inline void arch_spin_unlock(arch_spinlock_t *lock)
{
smp_mb();
lock->tickets.owner++;
dsb_sev();
}
函数名称:spin_unlock
