

前言
作者:Jesse Fu Nordic Semiconductor
本文介绍了如何在NCS(nRF Connect SDK)下配置和使用GPIO。内容包括以下三个部分:
Zephyr GPIO API配置和使用GPIO
DK Buttons and LEDs Library
PPI TRACE
使用Zephyr GPIO API配置和使用GPIO
nRF Connect SDK是基于Zephyr操作系统的,因此可以使用Zephyr的GPIO API来配置和使用GPIO。
使用Zephyr GPIO API包括以下步骤:
Config中加入CONFIG_GPIO=y;
在device tree中添加GPIO节点;
在应用程序中获取GPIO Device;
配置GPIO;
读写GPIO,其中GPIO读取可以使用Polling模式和中断模式。
GPIO device的添加和获取
以下是在Device Tree中添加GPIO节点的例子,在节点中配置了两个GPIO,每个GPIO有三个参数。第一个GPIO为GPIO0.1,低电平有效;第二个GPIO为GPIO1.2,低电平有效。
n: node {
foo-gpios = <&gpio0 1 GPIO_ACTIVE_LOW>,
<&gpio1 2 GPIO_ACTIVE_LOW>;
}
接下来我们可以使用gpio_dt_spec来获取device tree中定义的GPIO。
gpio_dt_spec结构体包括以下三部分,分别对应device tree中GPIO的三个参数。
port:GPIO 端口设备指针
pin:GPIO的PIN NUM
dt_flags:gpio在device tree中定义的配置 flags。这些flags在
gpio_dt_spec可以通过以下宏由device tree在具有gpio属性的节点中获取:
GPIO_DT_SPEC_GET_BY_IDX
GPIO_DT_SPEC_GET_BY_IDX_OR
GPIO_DT_SPEC_GET
GPIO_DT_SPEC_GET_OR
其中GPIO_DT_SPEC_GET,GPIO_DT_SPEC_GET_OR是获取节点GPIO列表中的第一个GPIO(index=0)的gpio_dt_spec;而GPIO_DT_SPEC_GET_BY_IDX,GPIO_DT_SPEC_GET_BY_IDX_OR则是获取节点GPIO列表里指定index的gpio_dt_spec。相对于GPIO_DT_SPEC_GET_BY_IDX,GPIO_DT_SPEC_GET,在使用GPIO_DT_SPEC_GET_BY_IDX_OR,GPIO_DT_SPEC_GET_OR时,如果在device tree中找不到对应gpio的属性则将gpio_dt_spec赋值为一个指定的默认值。
下面的例子展示了如何在上面提到的node节点中获取第二个GPIO(index=1)的gpio_dt_spec。
const struct gpio_dt_spec spec = GPIO_DT_SPEC_GET_BY_IDX(DT_NODELABEL(n), foo_gpios, 1);
相当于给gpio_dt_spec初始化为以下值:
{
.port = DEVICE_DT_GET(DT_NODELABEL(gpio1)),
.pin = 2,
.dt_flags = GPIO_ACTIVE_LOW
}
GPIO的配置
除了gpio_dt_spec中定义的配置flags以外,GPIO还需要其他额外的配置。可以通过以下API来对GPIO进行配置:
gpio_pin_configure_dt(const struct gpio_dt_spec *spec, gpio_flags_t extra_flags)相当于gpio_pin_configure(spec->port, spec->pin, spec->dt_flags | extra_flags);
以下是一些GPIO的配置选项:
GPIO_INPUT:将引脚配置为输入。
GPIO_OUTPUT:将引脚配置为输出,不更改输出状态。
GPIO_DISCONNECTED:禁用输入和输出引脚。
GPIO_OUTPUT_LOW:将GPIO引脚配置为输出并将其初始化为低状态。
GPIO_OUTPUT_HIGH:将GPIO引脚配置为输出并将其初始化为高状态。
GPIO_OUTPUT_INACTIVE:将GPIO引脚配置为输出并将其初始化为逻辑0。
GPIO_OUTPUT_ACTIVE:将GPIO引脚配置为输出并将其初始化为逻辑1。
另外还有一些配置选项是Nordic独有的,比如Drive strength(bit8,bit9),它通常与GPIO_OPEN_DRAIN,GPIO_OPEN_SOURCE配合使用。具体代码如下:
static int get_drive(gpio_flags_t flags, nrf_gpio_pin_drive_t *drive)
{
switch (flags & (NRF_GPIO_DRIVE_MSK | GPIO_OPEN_DRAIN)) {
case NRF_GPIO_DRIVE_S0S1:
*drive = NRF_GPIO_PIN_S0S1;
break;
case NRF_GPIO_DRIVE_S0H1:
*drive = NRF_GPIO_PIN_S0H1;
break;
case NRF_GPIO_DRIVE_H0S1:
*drive = NRF_GPIO_PIN_H0S1;
break;
case NRF_GPIO_DRIVE_H0H1:
*drive = NRF_GPIO_PIN_H0H1;
break;
case NRF_GPIO_DRIVE_S0 | GPIO_OPEN_DRAIN:
*drive = NRF_GPIO_PIN_S0D1;
break;
case NRF_GPIO_DRIVE_H0 | GPIO_OPEN_DRAIN:
*drive = NRF_GPIO_PIN_H0D1;
break;
case NRF_GPIO_DRIVE_S1 | GPIO_OPEN_SOURCE:
*drive = NRF_GPIO_PIN_D0S1;
break;
case NRF_GPIO_DRIVE_H1 | GPIO_OPEN_SOURCE:
*drive = NRF_GPIO_PIN_D0H1;
break;
default:
return -EINVAL;
}
return 0;
}
gpio_pin_interrupt_configure_dt(const struct gpio_dt_spec *spec, gpio_flags_t flags)可以将中断配置到指定GPIO。以下是GPIO中断的配置选项:
GPIO_INT_DISABLE:禁用GPIO引脚中断。
GPIO_INT_EDGE_RISING:将GPIO中断配置为在引脚上升沿触发并启用它。
GPIO_INT_EDGE_FALLING:将GPIO中断配置为在引脚下降沿触发并启用它。
GPIO_INT_EDGE_BOTH:将GPIO中断配置为在引脚上升或下降沿触发并启用它。
GPIO_INT_LEVEL_LOW:将GPIO中断配置为在物理电平低时触发并启用它。
GPIO_INT_LEVEL_HIGH:将GPIO中断配置为在物理电平高时触发并启用它。
GPIO_INT_EDGE_TO_INACTIVE:将GPIO中断配置为在状态更改到逻辑0时触发并启用它。
GPIO_INT_EDGE_TO_ACTIVE:将GPIO中断配置为在状态更改到逻辑1时触发并启用它。
GPIO_INT_LEVEL_INACTIVE:将GPIO中断配置为在逻辑电平0时触发并启用它。
GPIO_INT_LEVEL_ACTIVE:将GPIO中断配置为在逻辑电平1时触发并启用它。
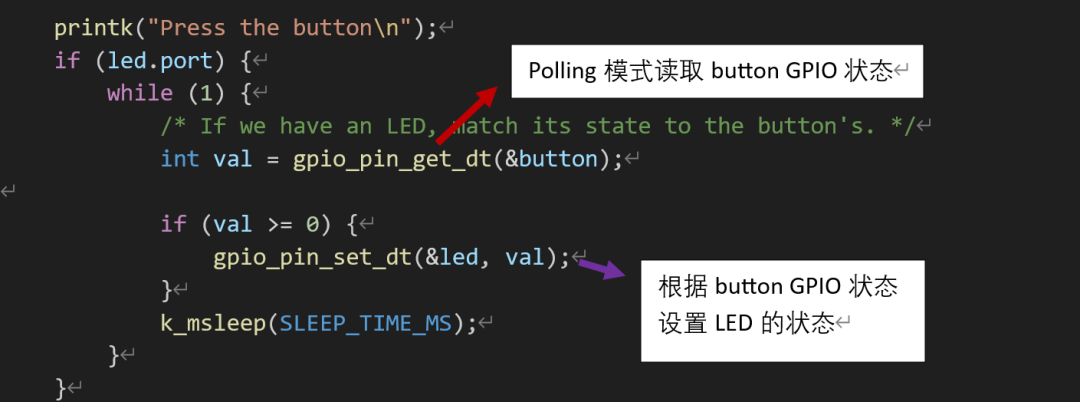
Polling模式下读写GPIO
可以使用以下API对GPIO进行读写操作:
static inline int gpio_pin_set_dt(const struct gpio_dt_spec *spec, int value) 相当于 gpio_pin_set(spec->port, spec->pin, value);
对指定输出引脚设置逻辑电平。
static inline int gpio_pin_set_raw(const struct device *port, gpio_pin_t pin, int value)
对指定输出引脚设置物理电平。
static inline int gpio_pin_toggle_dt(const struct gpio_dt_spec *spec) 相当于 gpio_pin_toggle (spec->port, spec->pin)
翻转指定输出引脚电平。
static inline int gpio_pin_get_dt(const struct gpio_dt_spec *spec)相当于 gpio_pin_get(spec->port, spec->pin)
读取指定输入引脚逻辑电平。
static inline int gpio_pin_get_raw(const struct device *port, gpio_pin_t pin)
读取指定输入引脚物理电平。
另外,还可以使用gpio_port_XXXX API对GPIO端口进行操作。
中断模式读取GPIO
中断模式读取GPIO包括以下步骤:
1. 使用下面API给指定PIN配置中断触发方式
static inline int gpio_pin_interrupt_configure_dt(const struct gpio_dt_spec *spec, gpio_flags_t flags) 相当于gpio_pin_interrupt_configure(spec->port, spec->pin, flags);
示例代码如下
gpio_pin_interrupt_configure_dt(&gpio_spec, GPIO_INT_EDGE_TO_ACTIVE);
2. 定义回调函数,比如 void pin_isr(const struct device *dev, struct gpio_callback *cb, gpio_port_pins_t pins);
这个回调函数会在中断触发时调用。
3. 定义数据类型为 struct gpio_callback 的变量,这个变量保存了pin num和回调函数的信息。下面是个示例:
static struct gpio_callback pin_cb_data;
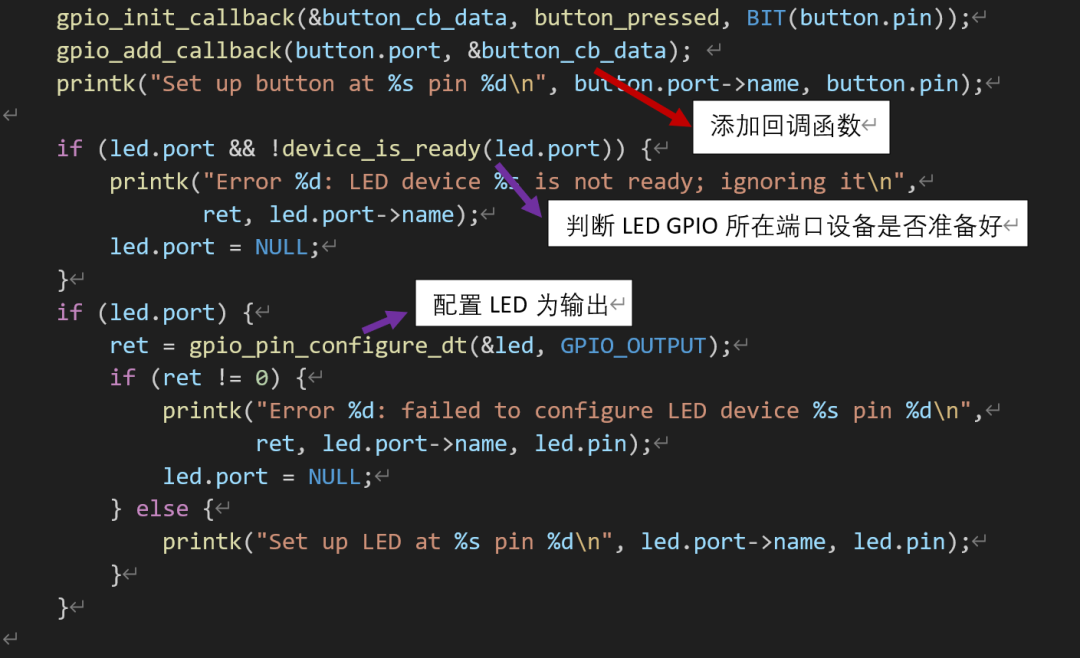
4. 使用gpio_init_callback()初始化gpio_callback 变量,下面是一个示例
gpio_init_callback(& pin_cb_data ,pin_isr ,BIT(gpio_spec.pin));
5. 使用gpio_add_callback()添加callback, 示例代码如下:
gpio_add_callback(gpio_spec.port, & pin_cb_data);
Zephyr GPIO API的实现
Zephyr gpio API最终会调用到nrfx gpiote, nrfx gpio驱动。它是由文件gpio_nrf.c以及头文件gpio.h里的内联函数实现的。下面以gpio_pin_interrupt_configure_dt()为例说明这个函数是如何实现的。
在gpio.h定义了内联函数gpio_pin_interrupt_configure_dt();
里面调用的函数关系如下
gpio_pin_interrupt_configure_dt() =>
gpio_pin_interrupt_configure() =>
z_impl_gpio_pnrfxin_interrupt_configure() =>
(api->pin_interrupt_configure()); 也就是 gpio_nrfx_pin_interrupt_configure()
而gpio_nrfx_pin_interrupt_configure()会调用nrfx gpiote, nrf gpio的驱动。
因为大部分函数都是内联函数,所以实际使用中只多增加了一个调用层级。
接下来,我们看一下gpio_nrfx_pin_interrupt_configure()是如何实现的。
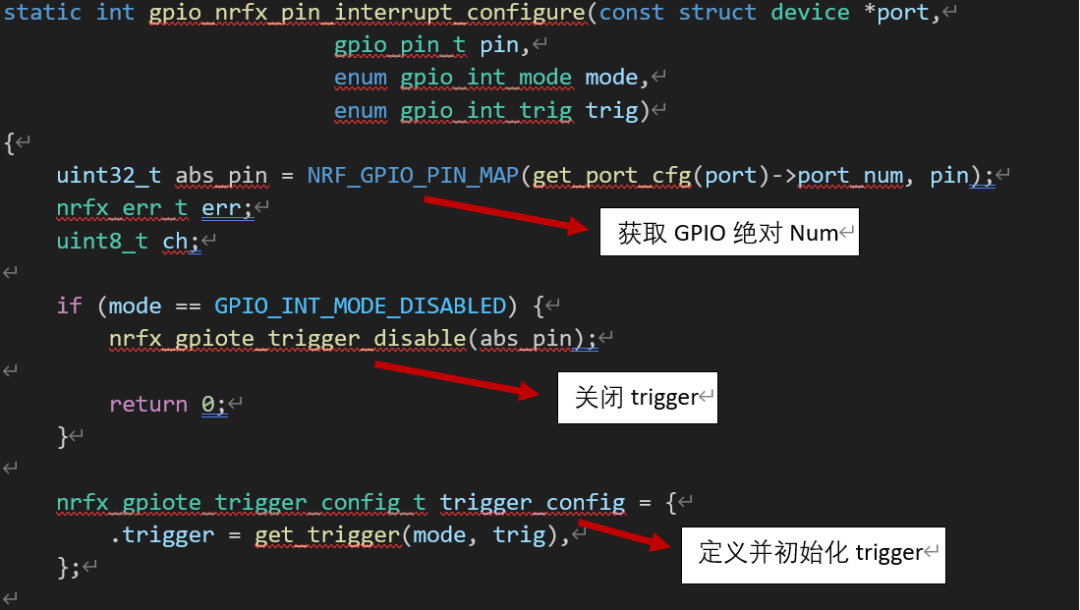
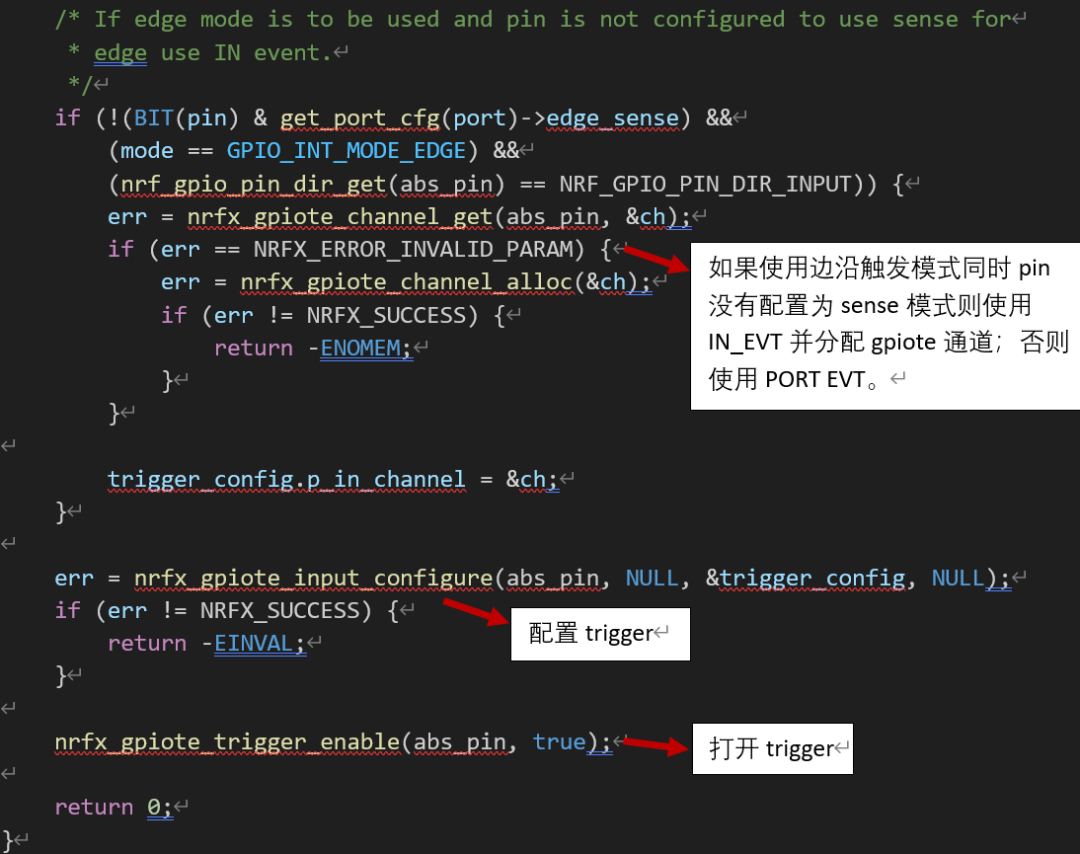
从上面我们可以看到如果中断使用边沿触发模式而且该pin没有配置成sense模式则使用nrfx gpiote的IN EVT。如果使用电平触发模式或者pin被配置为sense模式则使用PORT EVT。
Zephyr中GPIO的例子
Zephyr中关于GPIO有Blinky和Button两个例子。下面是Blinky的例子,位于zephyr\samples\basic\blinky
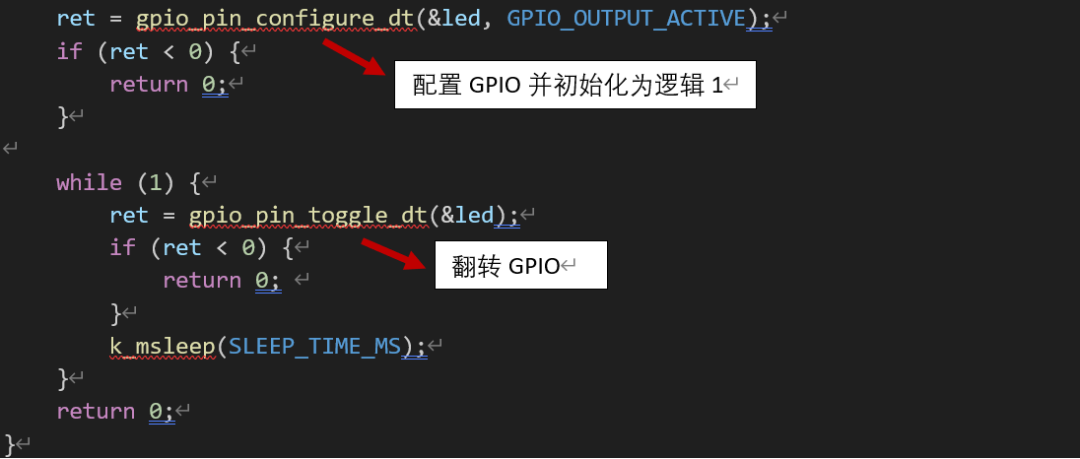
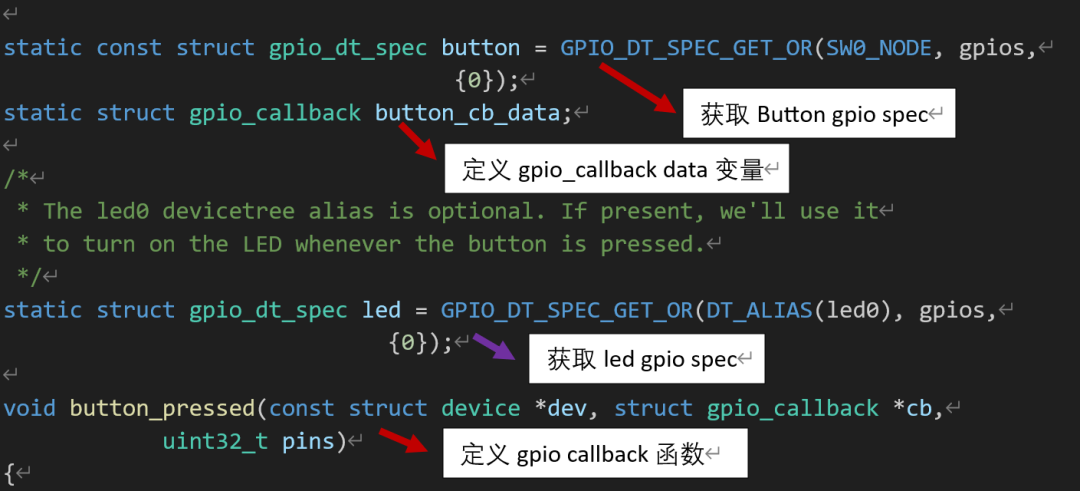
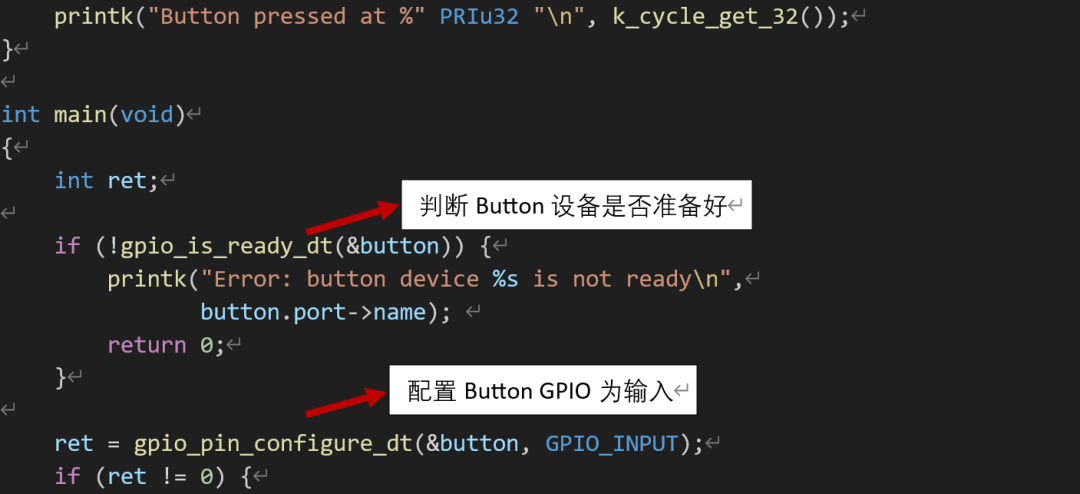
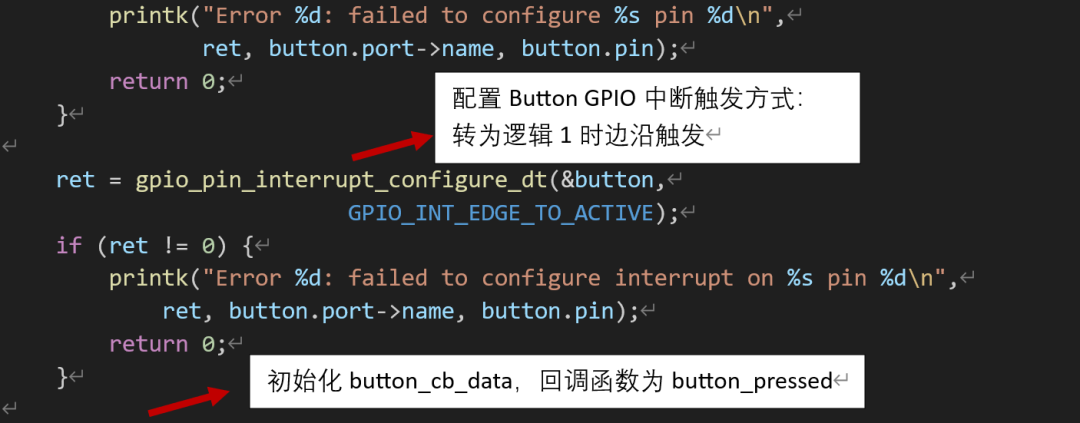
Button例子代码如下,位于zephyr\samples\basic\button
DK Buttons and LEDs Library
DK Buttons and LEDs Library是Nordic提供的用于与按键和LED交互的模块。它是在Zephyr GPIO API之上实现的API。
支持读取4个以内的按键或者控制4个以内的LEDs
支持按键防抖功能。相对于直接调用Zephyr GPIO API, 不需要用户额外实现按键防抖功能。
相对于Zephyr GPIO API,调用更加简单方便。
DK Buttons and LEDs Library的使用方法如下:
在proj conf中加入CONFIG_DK_LIB=y。
在device tree中加入LEDs和Buttons的节点。
在应用程序中添加代码
#include
调用dk_leds_init(),接下来就可以设置单个LED的值或者将他们通过掩码设置到指定的状态。
调用dk_buttons_init(),在初始化时可以传递回调函数,当每次按键更改时都会调用此回调函数。也可以通过polling模式读取按键的值。
LEDs和Buttons设备树节点的定义
LEDs和Buttons的节点Binddings定义在../bindings/gpio/gpio-leds.yaml 和 ../bindings/gpio/gpio-keys.yaml。
Leds节点的例子如下:
/ {
leds {
compatible = "gpio-leds";
led_0 {
/* LED 0 on P0.13, LED on when pin is high */
gpios = < &gpio0 13 GPIO_ACTIVE_HIGH >;
label = "LED 0";
};
led_1 {
/* LED 1 on P0.14, LED on when pin is low */
gpios = < &gpio0 14 GPIO_ACTIVE_LOW >;
label = "LED 1";
};
led_2 {
/* LED 2 on P1.0, on when low */
gpios = < &gpio1 0 GPIO_ACTIVE_LOW >;
label = "LED 2";
};
led_3 {
/* LED 3 on P1.1, on when high */
gpios = < &gpio1 1 GPIO_ACTIVE_HIGH >;
label = "LED 3";
};
};
};
这个例子中定义了四个LED。LED_0和LED_3为高电平点亮;LED_1和LED_2低电平点亮。
以下例子为Buttons的例子:
/ {
buttons {
compatible = "gpio-keys";
/*
* Add up to 4 total buttons in child nodes as shown here.
*/
button0: button_0 {
/* Button 0 on P0.11. Enable internal SoC pull-up
* resistor and treat low level as pressed button. */
gpios = <&gpio0 11 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Button 0";
};
button1: button_1 {
/* Button 1 on P0.12. Enable internal pull-down resistor.
* Treat high level as pressed button. */
gpios = <&gpio0 12 (GPIO_PULL_DOWN | GPIO_ACTIVE_HIGH)>;
label = "Button 1";
};
button2: button_2 {
/* Button 2 on P1.12, enable internal pull-up,
* low level is pressed. */
gpios = <&gpio1 12 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Button 2";
};
button3: button_3 {
/* Button 3 on P1.15, no internal pull resistor,
* low is pressed. */
gpios = <&gpio1 15 GPIO_ACTIVE_LOW>;
label = "Button 3";
};
};
};
在这个例子中定义了四个Buttons。Button0,Button2,Button3按键按下去时为低电平并且Button0和Button2配置为内部上拉,Button1按键按下去时为高电平且配置为内部下拉。
LEDs控制
LEDs控制的API包括以下:
int dk_leds_init(void) : 初始化LEDs library
int dk_set_led_on(uint8_t led_idx : 打开单个LED
int dk_set_led_off(uint8_t led_idx) : 关闭单个LED
int dk_set_led(uint8_t led_idx, uint32_t val) :打开或者关闭单个LED
int dk_set_leds(uint32_t leds) :通过LEDs的掩码来设置LEDs
int dk_set_leds_state(uint32_t leds_on_mask, uint32_t leds_off_mask) :通过LEDs on/off掩码来设置LEDs状态
Buttons读取
DK Buttons and LEDs Library 为Buttons的读取提供了以下API:
int dk_buttons_init(button_handler_t button_handler):初始化Buttons并传入回调函数,回调函数在按键状态发生改变时调用。
typedef void (*button_handler_t)(uint32_t button_state, uint32_t has_changed)
button_state: 按键的状态掩码值
has_changed: 指示哪些按键状态发生了改变
uint32_t dk_get_buttons(void):读取按键的掩码
void dk_read_buttons(uint32_t *button_state, uint32_t *has_changed):读取按键的状态和状态改变的按键掩码值
Buttons读取实现过程
DK Buttons and LEDs Library是在文件dk_buttons_leds.c中实现的,下面重点介绍下Buttons读取的实现过程。
Buttons lib采用中断和扫描相结合的方式。
Buttons lib有两种状态
STATE_WAITING:等待按键中断触发事件
STATE_SCANNING :关闭中断,启动可延迟的工作队列进行定时扫描,扫描由 buttons_scan_fn(struct k_work *work)实现,默认扫描间隔为10ms。
Buttons lib状态转换
当Buttons初始化时或者Button中断被触发时会关闭中断并启动可延迟的工作队进行定时扫描。
在扫描状态下,当发现按键状态发生改变时,调用用户回调函数;当按键掩码值为0时,即所有按键都处于release状态,程序退出扫描状态并启动中断进入等待状态;当按键掩码值不为0时,继续启动可延迟的工作队列,过一段时间进行下一次扫描。
因为按键采用定时扫描,所以过滤掉了按键抖动。
在没有按键发生时,程序处于等待状态进入睡眠,从而降低了功耗。
中断通常采用电平触发模式,使用PORT EVT。
配置选项
DK Buttons and LEDs Library包括以下配置选项:
menuconfig DK_LIBRARY
bool "Button and LED Library for Nordic DKs"
select GPIO
开启DK_LIBRARY
config DK_LIBRARY_BUTTON_SCAN_INTERVAL
int "Scanning interval of buttons in milliseconds"
default 10
按健的扫描间隔(毫秒)
config DK_LIBRARY_DYNAMIC_BUTTON_HANDLERS
bool "Enable the runtime assignable button handler API"
default y
除了传递给 dk_buttons_init 的按健处理程序函数之外,还可以在运行时添加和删除任意数量的按健处理程序。使用的API如下:
void dk_button_handler_add(struct button_handler *handler)添加回调函数;
int dk_button_handler_remove(struct button_handler *handler)动态删除回调函数。
Peripheral LBS Sample
接下来,我们以Peripheral LBS Sample为例说明这个例子是如何使用DK Buttons and LEDs Library的。这个例子位于nrf\samples\bluetooth\peripheral_lbs
以下是这个例子中初始化LEDs和Buttons的代码:
err = dk_leds_init();
if (err) {
printk("LEDs init failed (err %d)\n", err);
return 0;
}
err = init_button();
if (err) {
printk("Button init failed (err %d)\n", err);
return 0;
}
static int init_button(void)
{
int err;
err = dk_buttons_init(button_changed);
if (err) {
printk("Cannot init buttons (err: %d)\n", err);
}
return err;
}
接下来是LEDs的控制BEL连接时,点亮连接指示灯。
dk_set_led_on(CON_STATUS_LED);
BLE断开时,关闭连接指示灯
dk_set_led_off(CON_STATUS_LED);
app_led_cb():根据BLE传入命令设置用户灯状态。
static void app_led_cb(bool led_state)
{
dk_set_led(USER_LED, led_state);
}
在main()主函数里闪烁运行状态灯
for (;;) {
dk_set_led(RUN_STATUS_LED, (++blink_status) % 2);
k_sleep(K_MSEC(RUN_LED_BLINK_INTERVAL));
}
最后是按键的回调函数,当按键状态发生改变时,通过BLE把按键状态发送出去。
tatic void button_changed(uint32_t button_state, uint32_t has_changed)
{
if (has_changed & USER_BUTTON) {
uint32_t user_button_state = button_state & USER_BUTTON;
bt_lbs_send_button_state(user_button_state);
app_button_state = user_button_state ? true : false;
}
}
PPI TRACE
Nordic除了提供DK Buttons and LEDs Library这个与GPIO相关模块以外,还提供了PPI trace。
PPI trace是使用GPIO跟踪硬件事件的软件模块。
因为 PPI 用于将事件与 GPIOTE 中的任务连接起来,所以跟踪是在没有 CPU 干预的情况下进行的,非常适用于DEBUG。
PPI trace 可用于跟踪单个事件或一对互补事件。
当跟踪单个事件时,事件的每次发生都会切换引脚的状态(请参见 ppi_trace_config())。
当跟踪一对互补事件时(例如,传输的开始和结束),当其中一个事件发生时,引脚被设置为1,而当另一个事件发生时,引脚被清除(请参见 ppi_trace_pair_config())
需要注意的是,这个模块并没有调用Zephyr GPIO API,而是直接调用了nrfx gpiote的驱动。这是因为这样不但效率更高而且可以实现更加丰富的功能。
关于nrfx gpiote以及nrfx gpio的API请参阅以下在线文档:
https://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrfx/drivers/gpiote/driver.html
https://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrfx/drivers/gpio/index.html
PPI trace API
PPI trace 提供了以下四个API:
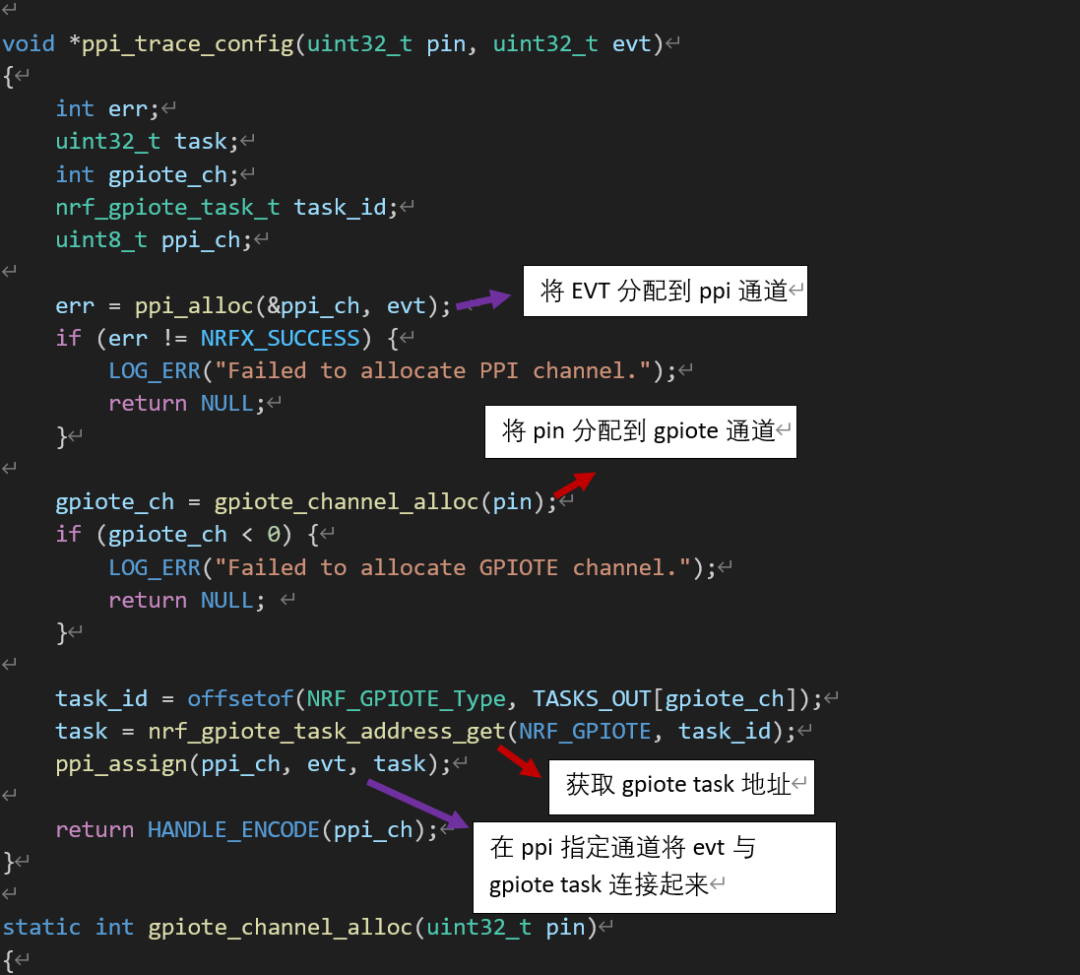
void *ppi_trace_config(uint32_t pin, uint32_t evt) :配置 PPI trace 引脚以跟踪单个事件
void *ppi_trace_pair_config(uint32_t pin, uint32_t start_evt, uint32_t stop_evt) :配置 PPI trace 引脚以跟踪一对互补事件
void ppi_trace_enable(void *handle) :启用 PPI trace 引脚
void ppi_trace_disable(void *handle):禁用 PPI trace 引脚
PPI trace API的实现
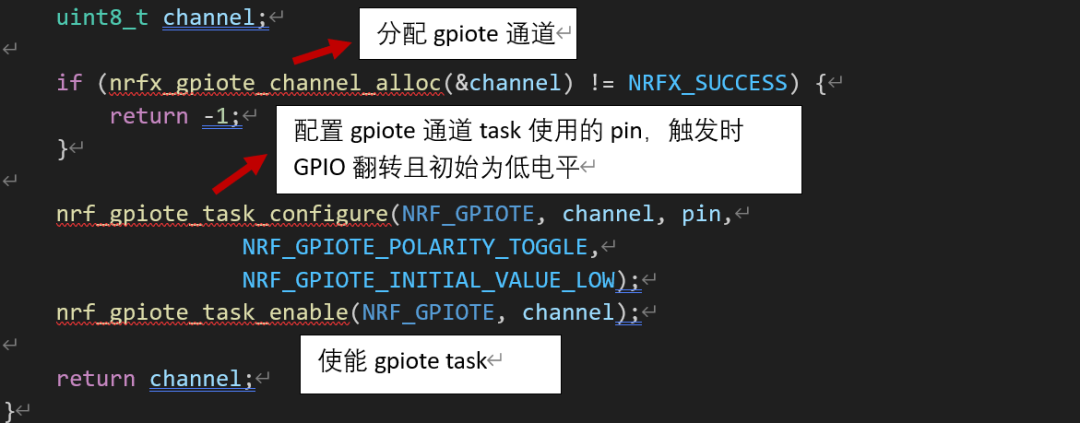
PPI trace API是在nrfx gpiote和nrfx ppi驱动之上实现的API,下面以ppi_trace_config() 为例看一下它是如何实现的。
PPI trace Sample
在nRF Connect SDK中,Nordic还提供了PPI trace的例子,这个例子位于nrf\samples\debug\ppi_trace。
此sample中使用了四个PIN来trace以下事件。
RTC 比较事件(NRF_RTC_EVENT_COMPARE_0),每50ms触发一次。
ppi_trace_pin_setup(CONFIG_PPI_TRACE_PIN_RTC_COMPARE_EVT,
nrf_rtc_event_address_get(RTC, NRF_RTC_EVENT_COMPARE_0));
RTC Tick 事件(NRF_RTC_EVENT_TICK),开始使用内部RC震荡器,然后无缝切换到外部晶振低频时钟。
ppi_trace_pin_setup(CONFIG_PPI_TRACE_PIN_RTC_TICK_EVT,
nrf_rtc_event_address_get(RTC, NRF_RTC_EVENT_TICK));
低频时钟 (LFCLK) 开始事件 (NRF_CLOCK_EVENT_LFCLKSTARTED),RTC外部晶振时钟ready时产生
ppi_trace_pin_setup(CONFIG_PPI_TRACE_PIN_LFCLOCK_STARTED_EVT,
nrf_clock_event_address_get(NRF_CLOCK,
NRF_CLOCK_EVENT_LFCLKSTARTED));
在蓝牙广播中Radio active 事件(radio ready和radio disable互补事件)
start_evt = nrf_radio_event_address_get(NRF_RADIO,
NRF_RADIO_EVENT_READY);
stop_evt = nrf_radio_event_address_get(NRF_RADIO,
NRF_RADIO_EVENT_DISABLED);
handle = ppi_trace_pair_config(CONFIG_PPI_TRACE_PIN_RADIO_ACTIVE,
start_evt, stop_evt);
例子中使用了Zephyr’s链路层而不是SoftDevice链路层,这是因为SoftDevice链路层在初始化期间被阻塞,直到低频晶振启动并且时钟稳定。因此,SoftDevice 链路层不能用于显示引脚上的LFCLK开始事件。
接下来我们选择nrf52840dk编译这个例子。四个PIN的默认定义在Kconfig中,分别为:
PPI_TRACE_PIN_RTC_COMPARE_EVT => 3 即A0.3。
PPI_TRACE_PIN_RTC_TICK_EVT => 4 即A0.4。
PPI_TRACE_PIN_LFCLOCK_STARTED_EVT => 28 即A0.28。
PPI_TRACE_PIN_RADIO_ACTIVE =>29 即A0.29。
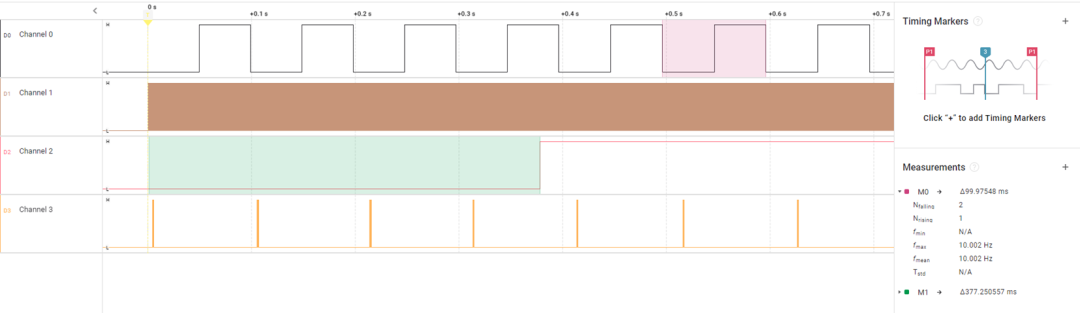
接下来我们把这四个管脚接入逻辑分析仪,打开nRF52840DK并捕获到以下波形。
通道0对应RTC 比较事件,通道1对应RTC Tick时间, 通道2对应低频时钟 (LFCLK) 开始事件,通道3对应Radio active 事件。从中我们可以看到RTC比较事件约50ms触发一次,打开PPI trace后377ms左右低频时钟被触发。大约每隔100ms 会有一组Radio Active事件。
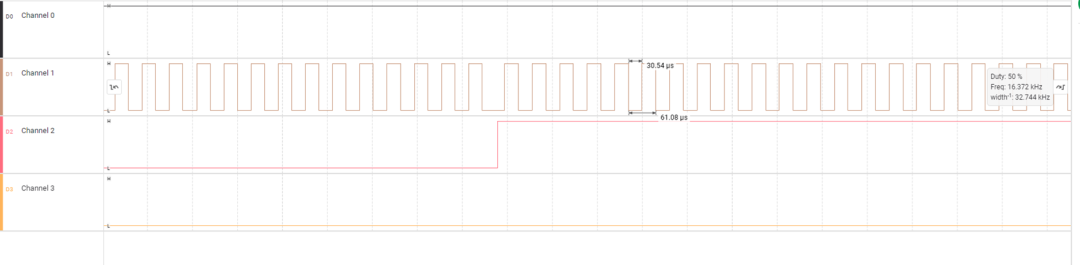
下面的图是放大的低频时钟被触发前后的波形,通道2低电平时RTC使用内部RC振荡器,高电平时使用外部低频晶振。我们可以看到RTC tick事件频率大约为32768Hz:
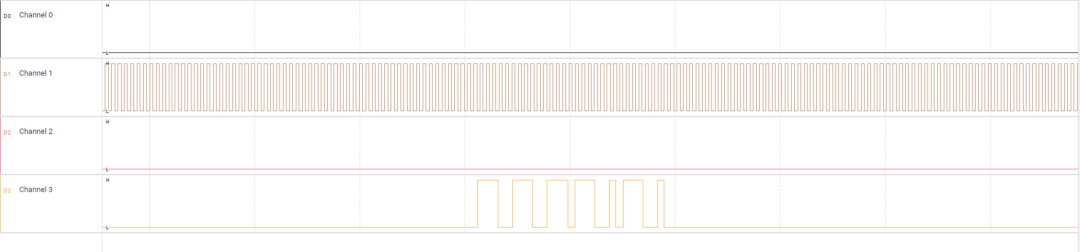
接下来的图形是放大的Radio Active事件,该事件在通道3中,高电平时表示Radio Active(Radio Ready EVT开始-->Radio Disable EVT结束)。
总结
nRF Connect SDK下可以使用以下三种方法对GPIO进行配置和使用。
使用DK Buttons and LEDs Library
这种方法最简单易用。
使用Zephyr GPIO API
这种方法调用标准的Zephyr GPIO驱动,因此对于基于Zephyr的工程易于移植和维护。
直接调用nrfx gpiote, nrfx gpio驱动
无论使用方法1还是方法2最终都会调用到nrfx gpiote, nrfx gpio 驱动。因此用户直接调用nrfx gpiote, nrfx gpio 驱动效率最高,也最灵活,比如ppi trace模块就是直接调用nrfx gpiote的驱动。如果用户已有nrf5 sdk基于nrfx gtiote,nrfx gpio驱动的程序,可以使用这种方法快速移植到nRF Connect SDK上面来。

中文官网:www.nordicsemi.cn
英文官网:www.nordicsemi.com
微信公众号:nordicsemi
https://devzone.nordicsemi.com
北京分公司: +86 10 6410 8596
上海分公司: +86 21 6330 0620
深圳分公司: +86 755 8322 0147
sales.cn@nordicsemi.no
按下方提示星标 Nordic🌟
以免错过半导体行业深度好文👇



点击“阅读原文” 进入Nordic半导体中文官网


