TMC5130A-TA被应用于“世界上最好的唱机转盘”Dereneville Modulaire MK II的新型全自动切向唱臂Dereneville DTT-01-S
然而就算赋予再多的意义,音乐终究要回归到听觉体验的本质,就像每个模拟音乐爱好者都希望在聆听自己喜爱的曲目时体验清晰、高保真、完美高音且无失真的声音。但在以黑胶唱片为代表的模拟唱片中,许多因素会扭曲原始曲目的信息,例如主动式线性唱臂的机电组件,即小型步进电机,会直接在唱臂的固定装置上产生振动,然后传递到唱头壳和唱针。这种振动会增加噪音,使头罩震动,并降低音频信号的质量。那么,当使用步进电机时,这些额外的振动及噪音从何而来又该如何规避呢?
要知道线性跟踪唱臂是步进电机的一个非常特殊且典型的应用,因为唱片机需要定位,非常精确地定位,而步进电机天生适合定位任务,并且成本相对较低,在静止和低速时具有高扭矩,无需使用变速箱。此外,与三相无刷电机和伺服驱动器相比,步进电机不一定需要复杂的控制算法或位置反馈进行换向。但其缺点同样明显,噪音水平较高,即使在低速或静止时也是如此。步进电机的振动有两个主要来源:步进分辨率,以及斩波器和脉宽调制(PWM)模式产生的副作用。
典型的步进电机有50个磁极,可实现200个完整步长,每个步距角为1.8°,可实现360°的完整机械旋转。但也有步数较少的步进电机,甚至高达800个全步。最初,这些电机用于全步或半步模式。施加在两个电机线圈A(蓝色)和B(红色)上的电流矢量在整个电气旋转(电气360°)上显示为矩形。下面两张图中突出显示的那样,电机线圈以90°相移模式以全电流或无电流供电。因此,每个周期的一电转由4个整步或8个半步组成。也就是说,50极步进电机需要50次电气旋转才能完成一整机械转。

全步操作(电机线圈A=蓝色和B=红色)
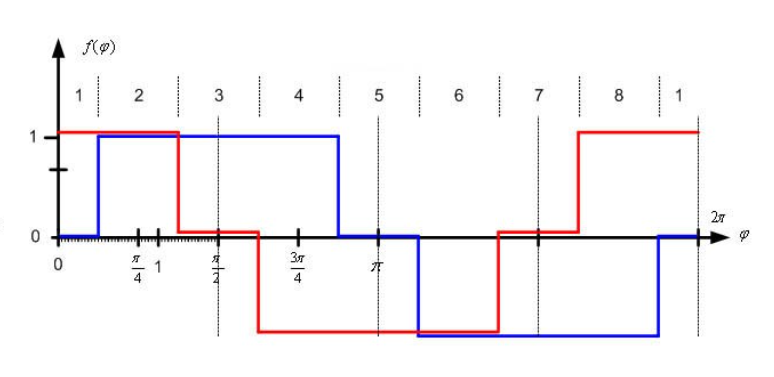
半步操作(电机线圈A=蓝色和B=红色)
全步或半步等低分辨率步进模式是步进电机的主要噪声源。它们引入了巨大的振动,这种振动遍布系统的整个力学,特别是在低速和接近某些共振频率时。在较高的速度下,由于惯性矩,这些影响会降低。
转子可以想象成一个谐波振荡器或弹簧摆,如下图所示。在驱动器电子设备施加新的电流矢量后,转子将沿着新指令位置的方向步进到下一个全步或半步位置。与脉冲响应类似,转子过冲并围绕下一个位置振荡,从而导致机械振动和噪音。运动远非平稳,尤其是在较低的速度下。
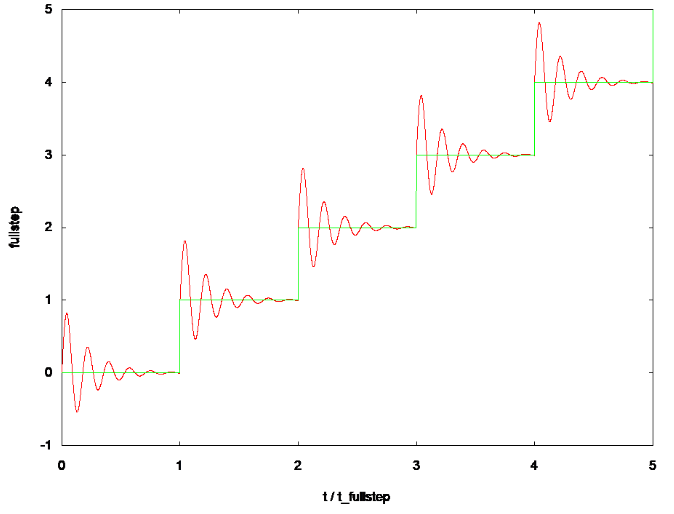
转子的摆动行为导致振动
为了减少这些振荡,可以应用一种称为微步进的机制。这将一个完整的步骤分成更小的部分,或微步骤。典型分辨率为2(半步)、4(四分之一步)、8、32甚至更多微步。定子线圈不是以全电流或零电流供电,而是以中间电流水平接近完整的正弦波波形超过4个完整的步骤。这将永磁转子定位在两个后续完整步骤之间的中间位置。这甚至允许适应步进电机的物理特性或应用的特殊定制电流波形(ADI Trinamic的驱动芯片支持该功能)。
微步进的最大分辨率由驱动器的A/D和D/A功能定义。ADI Trinamic的步进电机控制器和驱动器允许使用每整步高达256(8位)微步的步进电机,使用芯片的集成可配置正弦波表甚至完全自定义电流波形。
使用这种高微步分辨率的结果是电机转子现在以更小的角度或更短的距离步进。当切换到新位置时,如上图所示的过冲和下冲会大大减少。而下图显示了这种差异。
从全步分辨率切换到高微步分辨率时减少电机振动
另一个噪声和振动源源自步进电机通常使用的传统斩波器和PWM模式。由于粗步进分辨率的主要影响,这些模式的寄生效应常常被忽略。但随着使用微步进提高步进分辨率,这些寄生效应变得明显甚至可以听见。
经典的恒定关断时间PWM斩波器模式是一种电流控制的PWM斩波器,它以快衰减和慢衰减相位之间的固定关系工作。在其最大值点,电流达到指定的目标电流,这导致平均电流低于所需的目标电流,如下图所示。
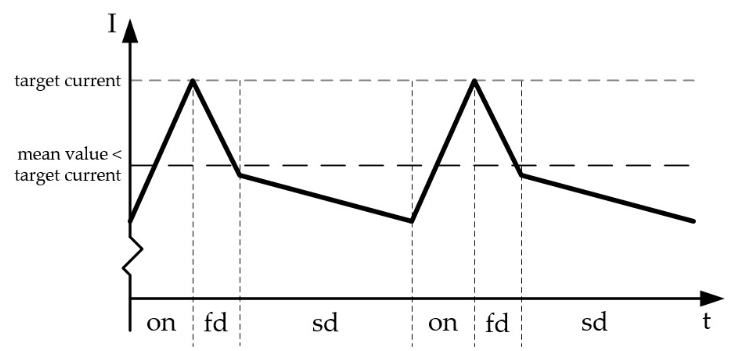
恒定关断时间(TOFF)PWM斩波模式:平均电流达不到目标电流
在完整的电气旋转中,当电流的符号(方向)发生变化时,这会导致正弦波的过零区域周围出现一个平台。这个平台的影响是电机绕组中电流为零的一小段时间,这意味着根本没有扭矩。这会导致摆动和振动,尤其是在较低的速度下。
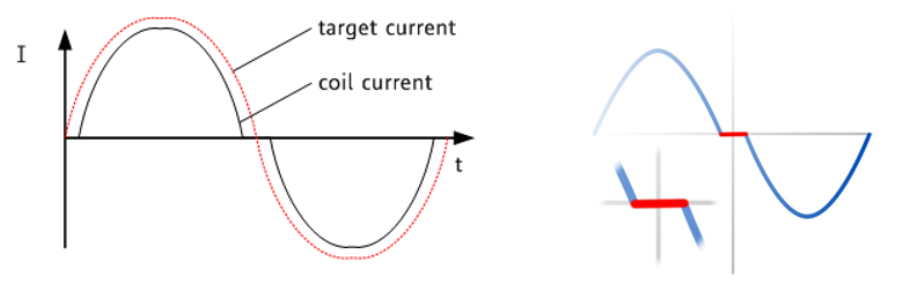
传统斩波器
与恒定关断时间斩波器相比,ADI Trinamic 的SpreadCycle™(高精度斩波算法)PWM斩波器模式应用采用磁滞功能,自动使用慢速和快速衰减周期之间的拟合关系。平均电流反映了配置的标称电流。在正弦波的过零区域没有平台。这减少了电流和转矩脉动,并接近了真正的正弦波形,与恒定关断时间的PWM斩波器相比,电机运行更加平稳。这在静止和慢速到中等速度时尤其重要。
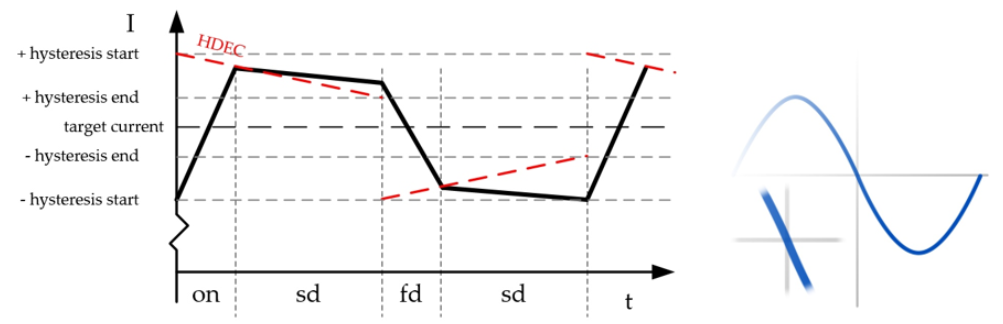
具有平滑过零的SpreadCycle 磁滞斩波器
步进电机完全静音秘诀:
硬件中实现StealthChop算法!
尽管微步减少了由低步分辨率引起的大部分振动,但高微步分辨率可以更容易地感知其他振动源。先进的电流控制PWM斩波器模式,如ADI Trinamic的SpreadCycle™(高精度斩波算法)算法,在硬件中实现,在很大程度上减少了振动和抖动。这对于许多标准应用来说已经足够了,也非常适合高速应用。
但即使使用像SpreadCycle这样的电流控制斩波器模式,由于电机线圈不同步、检测电阻上几毫伏的调节噪声和PWM抖动,仍然会产生一点点可听噪声和振动。这种噪音和振动对于高端应用、低速到中速应用以及零噪声应用至关重要,因为来自微步进驱动器和混合步进器的噪声会叠加在音频信号上,尤其是在各个音轨之间过渡的普通凹槽内。
对此,ADI Trinamic的StealthChop™算法也在硬件中实现,最终使步进电机静音。但是StealthChop实际上如何对电机实现静音,为什么它不会产生额外的噪音和振动?与基于电流的斩波器模式(如SpreadCycle)相比,StealthChop采用了不同的方法:它是一种基于电压斩波器的技术,负责唱臂和唱针的无噪音和平稳移动。结合闭环跟踪角度调节和精密激光光学,这使得头壳和测针的最大跟踪角度误差<0.05°。良好的传统枢轴唱臂具有<2°-3°的典型跟踪角误差,并且还受到滑行力和凹槽的机械磨损的影响。
ADI推出的TMC5130A-TA就是一款包含StealthChop模式的小型智能步进电机驱动器和控制器IC,是黑胶唱片机的终极解决方案。除了StealthChop之外,ADI Trinamic还改进了电压模式操作并将其与电流控制相结合。为了最大限度地减少电流波动,TMC5130A-TA芯片的驱动器根据电流反馈调节电压调制。这允许系统根据电机参数和工作电压进行自我调整。值得一提的是,被誉为“世界上最好的唱机转盘”Dereneville Modulaire MK III就采用了该款IC。

Dereneville Modulaire MK III转盘
消除了由直流控制环路的调节算法引起的小振荡。由于SpreadCycle和其他电流调节斩波器原理总是对线圈电流测量做出逐个周期的反应,因此复杂系统中总是存在几毫伏的噪声,以及内部两个线圈之间的电磁耦合。导致产生的电机电流的微小变化,从而影响斩波器。
下面两张图比较了电压控制的StealthChop和电流控制的SpreadCycle。StealthChop的过零行为是完美的:当电流值的符号从正变为负或反之亦然时,没有平台,而是零电流水平的直线交叉,因为电流是基于调制的PWM占空比。在50%PWM占空比下,电流实际上为零。
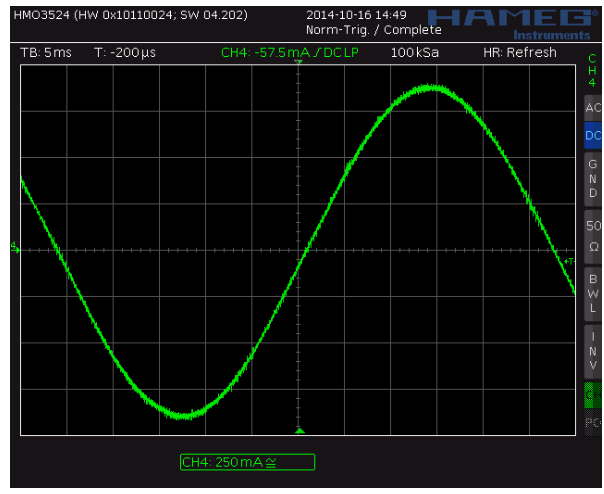
具有电压控制StealthChop™斩波器模式的一个电机相位的正弦波
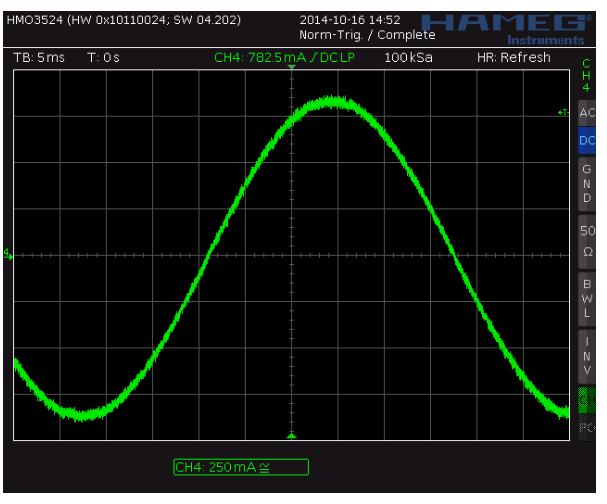
具有电流控制的SpreadCycle™(高精度斩波算法)斩波器模式的一个电机相位的正弦波
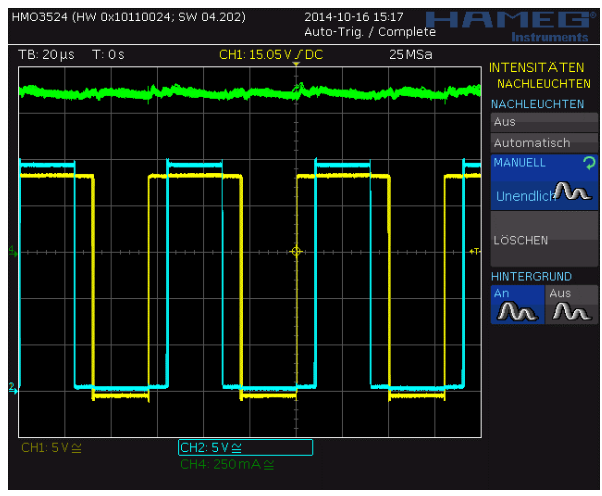
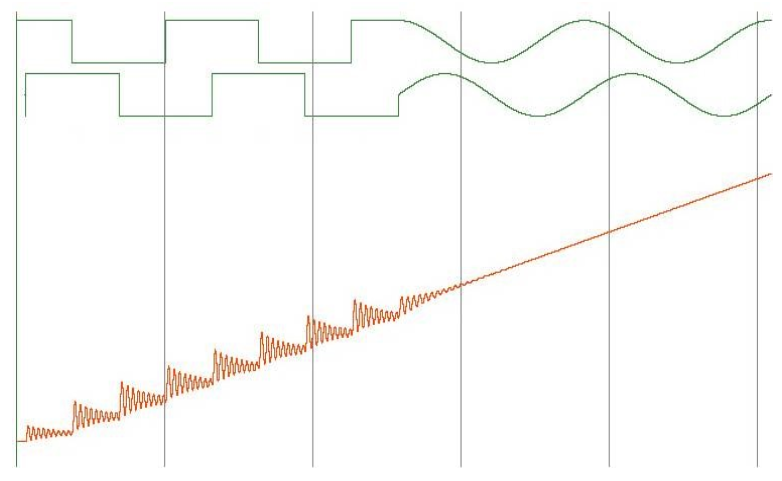
电压控制的StealthChop™斩波模式下电机相位和线圈电流的放大PWM视图
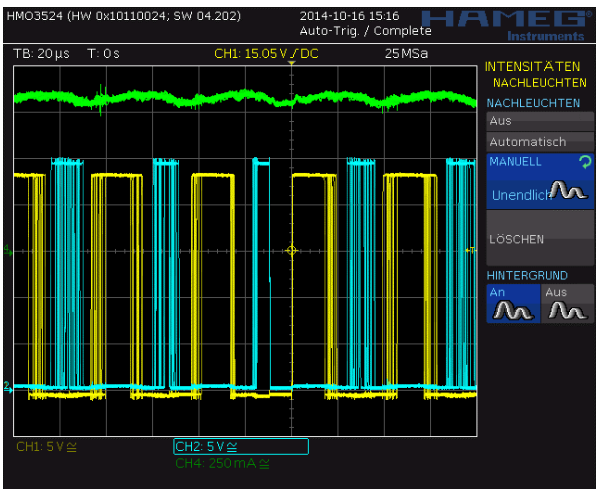
电流控制的SpreadCycle™(高精度斩波算法)斩波模式下电机相位和线圈电流的放大PWM视图
配备StealthChop的电机驱动器结合了与模拟非常相似的电流波形,并在不增加成本的情况下对功耗进行了一些小幅改进,除了无法改变的滚珠轴承噪音外,StealthChop提供了异常安静的步进电机性能,而使用StealthChop的应用已实现低于经典电流控制10dB的噪声水平。

用于切向唱臂DTT-01-S 的机电致动器的控制器 PCB,以及Trinamic 的智能步进电机驱动器解决方案