


《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
RT-Thread Studio 是RTT官方的一款集成开发环境,可以很方便的进行RT-Thread实时系统的程序开发,而且对应RT-Thread系统常用的组件可以进行图形化配置,非常的方便。
RT-Thread Studio可以访问官网 RT-Thread Studio 下载地址,在官网下载最新的 RT-Thread Studio 软件安装包。
下面基于 RT-Thread Studio ,把 LwIP 网络协议栈和RT-Thread系统移植到 APM32F4 上运行。
一、创建APM32F4的工程项目
1、首先点击新建RT-Thread项目

2、然后选择下面的配置,如果你的RTT Studio还没有APM32F4的软件包的话,选择添加更多资源,然后找到geehy厂商的软件包,然后安装即可。

上面的一些配置可以看自己板子的实际情况进行选择,比如可以选择其他串口作为控制台,或者选择其他调试模式等等。最后点击完成即可。
二、 编译下载生成的基本工程项目
点击完成之后,就可以在左边的资源管理器看到生成的项目文件了。
生成项目文件之后,我们可以直接点击编译(就是那个锤子的图标),刚刚生成的工程项目文件,我们现在直接编译,一般是不会有任何警告和错误的。
然后,编译完成之后,我们可以把程序下载到我们的板子上运行的。下载程序后,打开串口终端软件,可以看到RT-Thread打印的信息,如下:
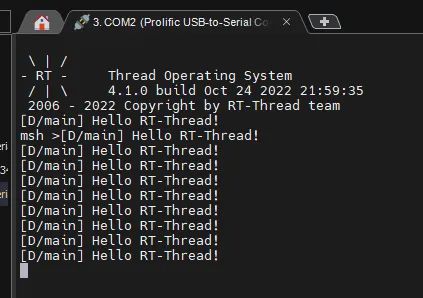
其中,程序会不断打印 Hello ... 字符串,这是因为Main函数里面输出的打印,如果觉得占用了控制台可以去main函数把该语句屏蔽。
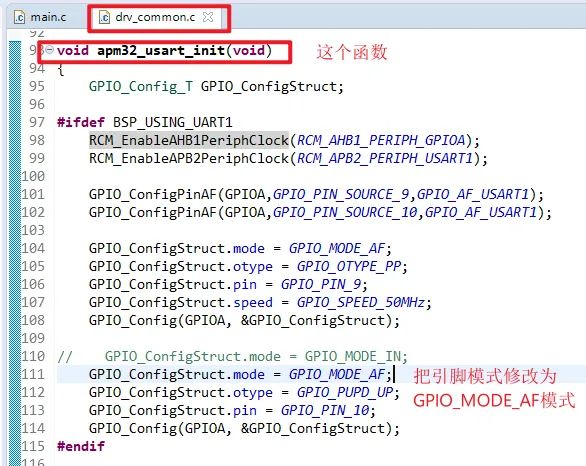
三、解决shell不能输入字符bug
这时,我们在串口终端发现,shell不能接收字符输入。这是一个bug,原因就是串口的GPIO配置有问题,我们把下面文件函数修改一下即可:
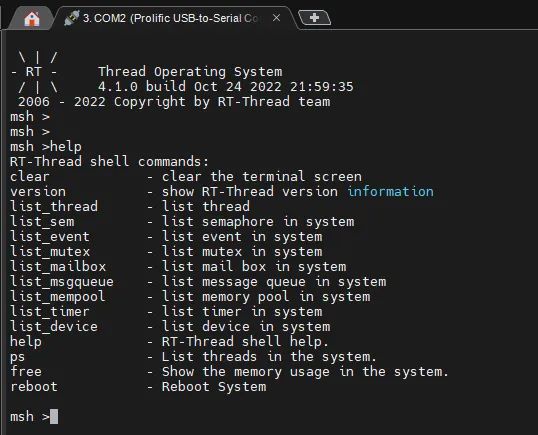
修改完之后,在重新编译下载,shell就可以正常输入字符、命令了,如下:
四、使能网络接口设备和LwIP
双击打开配置文件 RT-Thread Settings , 然后找到组件这里,使能网络接口设备和LwIP堆栈。
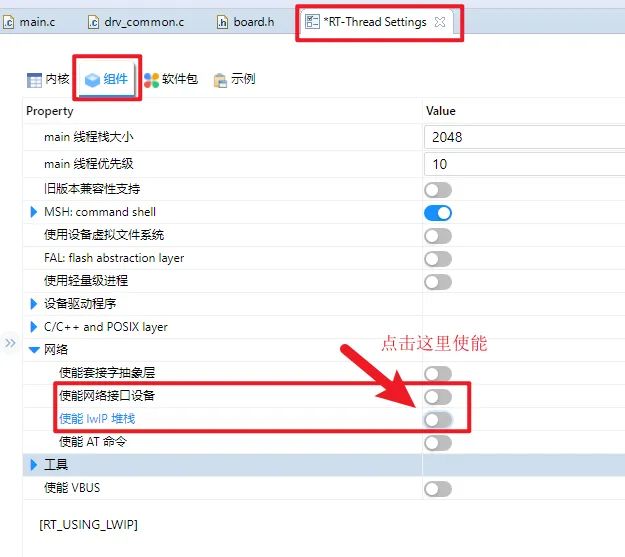
其中,我们点击使能之后,里面还有更详细的细节配置可供用户进行配置,比如是否使用DHCP进行动态获取IP地址等,这里我设置为静态IP,因为我没用插路由器。
然后点击保存后,再重新进行编译,可以看到没有任何警告和错误。
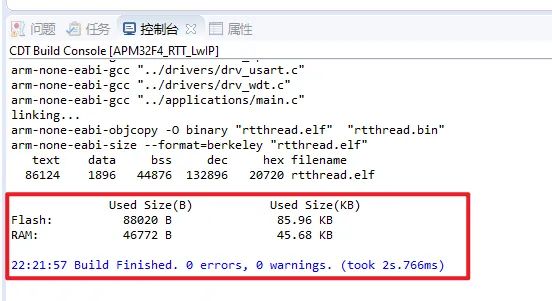
这个时候,我们其实可以下载程序运行了的,但是网络功能是还不能正常使用的,因为底层的网络驱动文件还没编写。
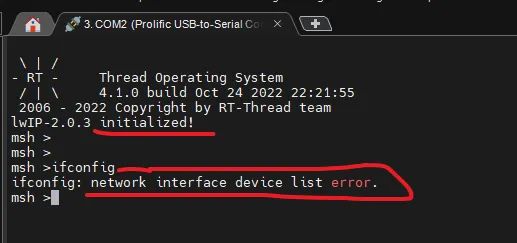
下载程序后,在终端输入 ifconfig 命令,可以看到说网络设备有错误,如下:
五、添加RTT的网络驱动文件(重点)
这个驱动文件如果bsp包里面有的话,应该是可以配置加入 RTT Studio 里面的吧,但是APM32并没有这个文件的支持,所以只能我们自己编写这个网络驱动文件了,可以参考下面RTT官方文档的介绍,看看需要我们提供什么样的接口函数。
https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/application-note/components/network/an0010-lwip-driver-porting
这里,我已经提前写好了这个文件,分别是 drv_eth.c 和 drv_eth.h 。我们把这两个文件复制到工程目录的drivers目录下。
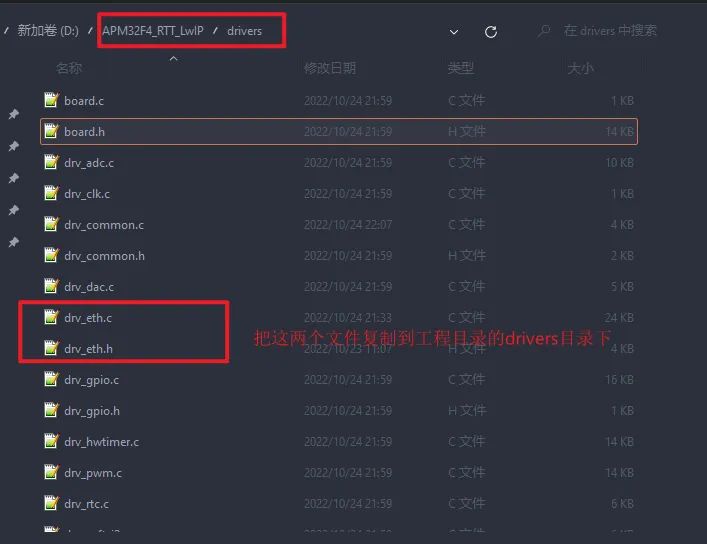
该步骤是在APM32在RT-Thread系统上使用网络组件的重点,这两个文件主要功能就是初始化MCU的ETH外设,以及对RT-Thread的网络组件提供对应的接口。
六、然后打开 BSP_USING_ETH 宏定义
我们在 board.h 文件中,打开 BSP_USING_ETH 这个宏定义,以及定义 phy 物理芯片的型号(根据自己板子的芯片类型选择),如下:
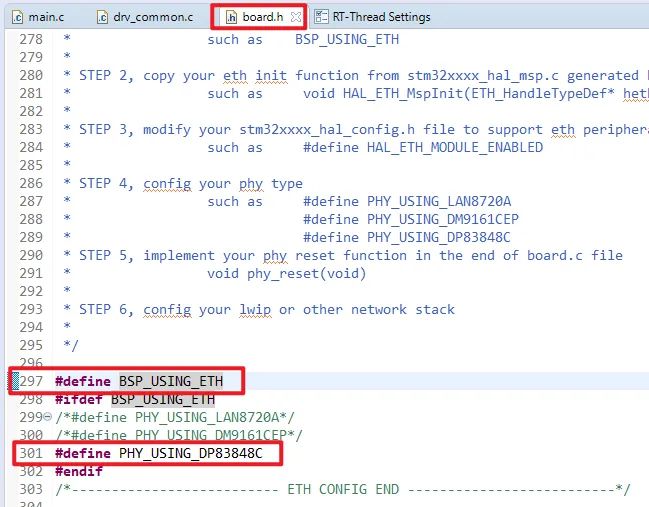
定义了 BSP_USING_ETH 和 PHY_USING_DP83848C 宏定义后,就相当于把 drv_eth.c 文件内容开启了。这时全部重新编译,然后可以看到超级多的报错。
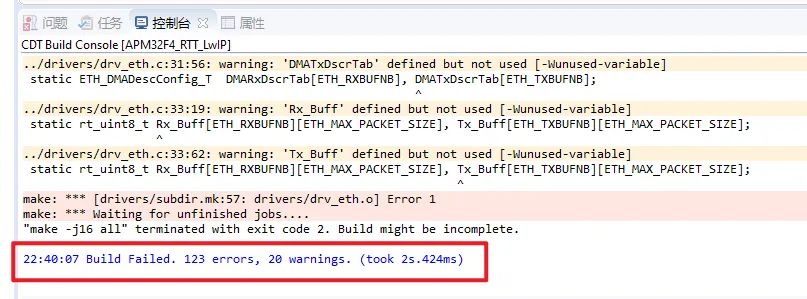
这些报错不要被吓到了,其实都是因为缺少文件造成的。
七、添加缺少的文件到工程目录中
我们打开右边的文件资源管理器,找到libraries目录,查看芯片的标准外设驱动库,可以看到并没有 apm32f4xx_eth.c 文件,这应该是 RTT Studio 没有合并进去吧。这个需要我们去geehy的官网下载f4的SDK包,然后把网口外设的标准驱动文件复制到这个目录下(包括头文件)即可。
然后再在drv_common.h文件中,添加下面两句语句(主要就是包含这两个两个所用到的头文件):
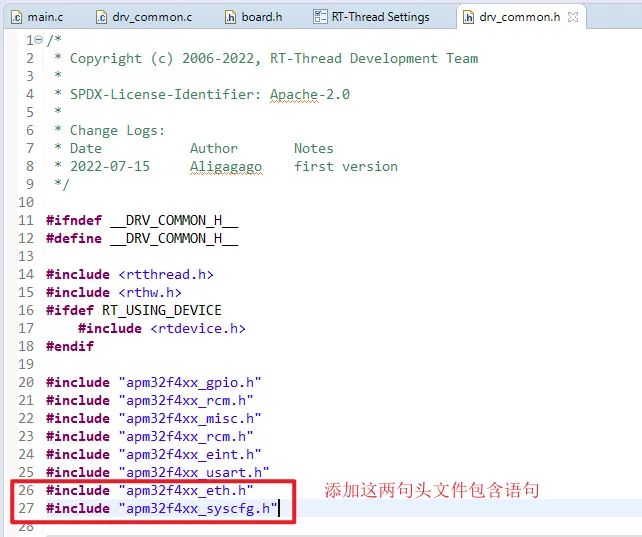
然后这时,全部重新编译,然后就可以看到报错已经非常少了。
八、添加 phy_reset 和 ETH_GPIO_Configuration 函数
上面全部重新编译,然后就只有3个报错了,如下:
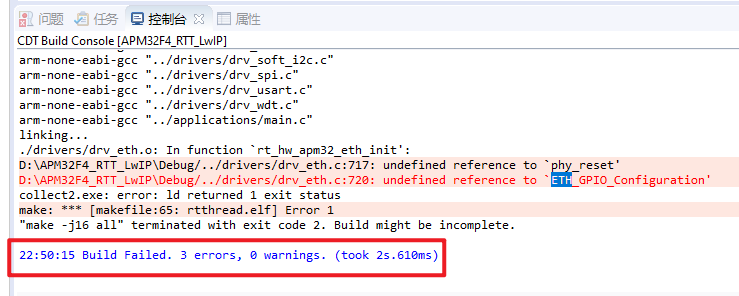
报错提示说没有phy_reset 和 ETH_GPIO_Configuration 这两个函数,这两个函数实际上时 drv_eth.c 文件要用到的,主要是复位phy芯片和初始化MCU的以太网外设的GPIO口,我们独立出来就是要用户去添加的,这里我已经写好了针对我们板子硬件的函数。
在board.c文件中添加上面两个函数:
1、phy_reset 函数:
/*
* phy reset
*/
void phy_reset(void)
{
/* PHY RESET PIN: PD11 */
GPIO_Config_T GPIO_ConfigStruct;
GPIO_ConfigStruct.mode = GPIO_MODE_OUT;
GPIO_ConfigStruct.speed = GPIO_SPEED_2MHz;
GPIO_ConfigStruct.otype = GPIO_OTYPE_PP;
GPIO_ConfigStruct.pupd = GPIO_PUPD_NOPULL;
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOD);
GPIO_ConfigStruct.pin = GPIO_PIN_11;
GPIO_Config(GPIOD, &GPIO_ConfigStruct);
GPIO_ResetBit(GPIOD, GPIO_PIN_11);
rt_thread_delay(2);
GPIO_SetBit(GPIOD, GPIO_PIN_11);
rt_thread_delay(2);
}
2、ETH_GPIO_Configuration 函数:
/* MII/RMII Media interface selection */
//#define MII_MODE
#define RMII_MODE
/*
* GPIO Configuration for ETH
*/
void ETH_GPIO_Configuration(void)
{
GPIO_Config_T GPIO_ConfigStruct;
/* Enable SYSCFG clock */
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_SYSCFG);
/* Enable GPIOs clocks */
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOA | RCM_AHB1_PERIPH_GPIOC | RCM_AHB1_PERIPH_GPIOG);
/* MII/RMII Media interface selection */
#if defined(MII_MODE) /* Mode MII. */
SYSCFG_ConfigMediaInterface(SYSCFG_INTERFACE_MII);
#elif defined(RMII_MODE) /* Mode RMII. */
SYSCFG_ConfigMediaInterface(SYSCFG_INTERFACE_RMII);
#endif
/*********************** Ethernet pins configuration ***************************/
/*
ETH_MDIO -------------------------> PA2
ETH_MDC --------------------------> PC1
ETH_MII_RX_CLK/ETH_RMII_REF_CLK---> PA1
ETH_MII_RX_DV/ETH_RMII_CRS_DV ----> PA7
ETH_MII_RXD0/ETH_RMII_RXD0 -------> PC4
ETH_MII_RXD1/ETH_RMII_RXD1 -------> PC5
ETH_MII_TX_EN/ETH_RMII_TX_EN -----> PG11
ETH_MII_TXD0/ETH_RMII_TXD0 -------> PG13
ETH_MII_TXD1/ETH_RMII_TXD1 -------> PG14
**** Just for MII Mode ****
ETH_MII_CRS ----------------------> PA0
ETH_MII_COL ----------------------> PA3
ETH_MII_TX_CLK -------------------> PC3
ETH_MII_RX_ER --------------------> PB10
ETH_MII_RXD2 ---------------------> PB0
ETH_MII_RXD3 ---------------------> PB1
ETH_MII_TXD2 ---------------------> PC2
ETH_MII_TXD3 ---------------------> PB8
*/
/* Configure PC1, PC4 and PC5 */
GPIO_ConfigStruct.pin = GPIO_PIN_1 | GPIO_PIN_4 | GPIO_PIN_5;
GPIO_ConfigStruct.speed = GPIO_SPEED_100MHz;
GPIO_ConfigStruct.mode = GPIO_MODE_AF;
GPIO_ConfigStruct.otype = GPIO_OTYPE_PP;
GPIO_ConfigStruct.pupd = GPIO_PUPD_NOPULL;
GPIO_Config(GPIOC, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOC, GPIO_PIN_SOURCE_1, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOC, GPIO_PIN_SOURCE_4, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOC, GPIO_PIN_SOURCE_5, GPIO_AF_ETH);
/* Configure PG11, PG13 and PG14 */
GPIO_ConfigStruct.pin = GPIO_PIN_11 | GPIO_PIN_13 | GPIO_PIN_14;
GPIO_Config(GPIOG, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOG, GPIO_PIN_SOURCE_11, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOG, GPIO_PIN_SOURCE_13, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOG, GPIO_PIN_SOURCE_14, GPIO_AF_ETH);
/* Configure PA1, PA2 and PA7 */
GPIO_ConfigStruct.pin = GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_7;
GPIO_Config(GPIOA, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOA, GPIO_PIN_SOURCE_1, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOA, GPIO_PIN_SOURCE_2, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOA, GPIO_PIN_SOURCE_7, GPIO_AF_ETH);
#ifdef MII_MODE
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOB);
/* Configure PC2, PC3 */
GPIO_ConfigStruct.pin = GPIO_PIN_2 | GPIO_PIN_3;
GPIO_Config(GPIOC, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOC, GPIO_PIN_SOURCE_2, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOC, GPIO_PIN_SOURCE_3, GPIO_AF_ETH);
/* Configure PB0, PB1, PB10 and PB8 */
GPIO_ConfigStruct.pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_10 | GPIO_PIN_8;
GPIO_Config(GPIOB, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOB, GPIO_PIN_SOURCE_0, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOB, GPIO_PIN_SOURCE_1, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOB, GPIO_PIN_SOURCE_10, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOB, GPIO_PIN_SOURCE_8, GPIO_AF_ETH);
/* Configure PA0, PA3 */
GPIO_ConfigStruct.pin = GPIO_PIN_0 | GPIO_PIN_3;
GPIO_Config(GPIOA, &GPIO_ConfigStruct);
GPIO_ConfigPinAF(GPIOA, GPIO_PIN_SOURCE_0, GPIO_AF_ETH);
GPIO_ConfigPinAF(GPIOA, GPIO_PIN_SOURCE_3, GPIO_AF_ETH);
#endif
}
当添加完上面的代码之后,再次编译就可以编译通过了,没有任何警告和错误,如下:
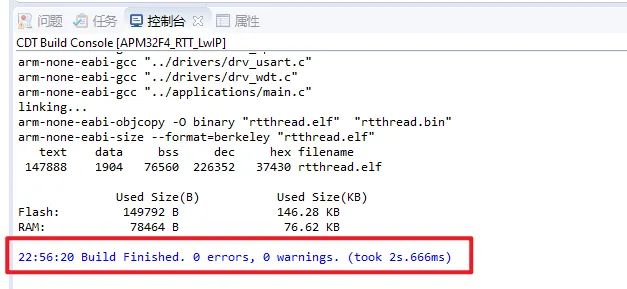
这时的代码就相当于把LwIP全部移植成功了,包括底层的网卡驱动。
九、验证网络功能是否正常
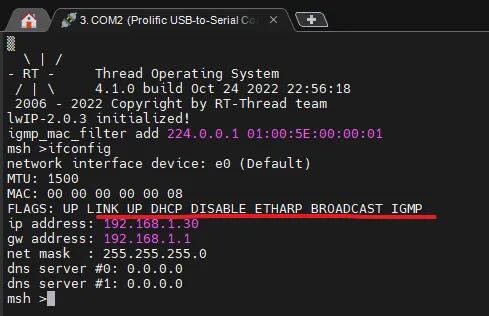
下载程序后运行,然后再串口终端输入 ifconfig 命令,可以看到网卡已经正常工作了,而且使用的是静态IP。
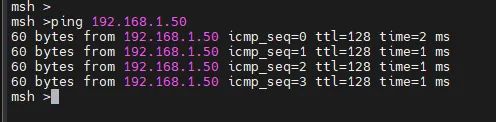
我们ping一下电脑主机IP(我的电脑主机IP是:1992.168.1.50),可以看到正常ping通,说明网络功能已经正常了。
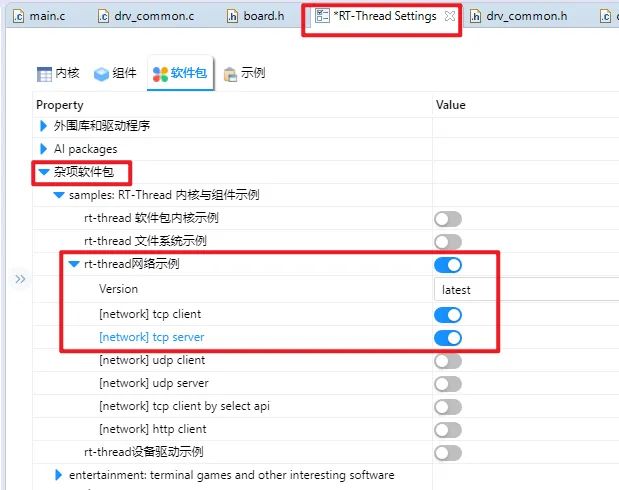
十、使用RTT的tcp client和server例程
RTT还有各种软件包,其中tcp client和server例程就属于软件包的一部分,我们可以使能这两个例程,这样就可以在shell命令行下面运行tcp客户端或者服务器例程了。
1、先使能这两个软件包
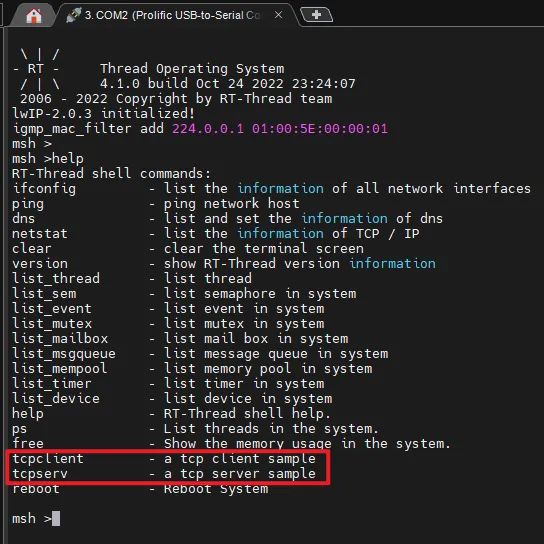
2、保存配置,然后重新编译下载,可以在shell终端看到多了两个命令:
3、然后可以运行 tcpserv 命令,使得开发板作为服务器。然后可以在电脑端打开网络调试工具,作为客户端去连接开发板,如下:
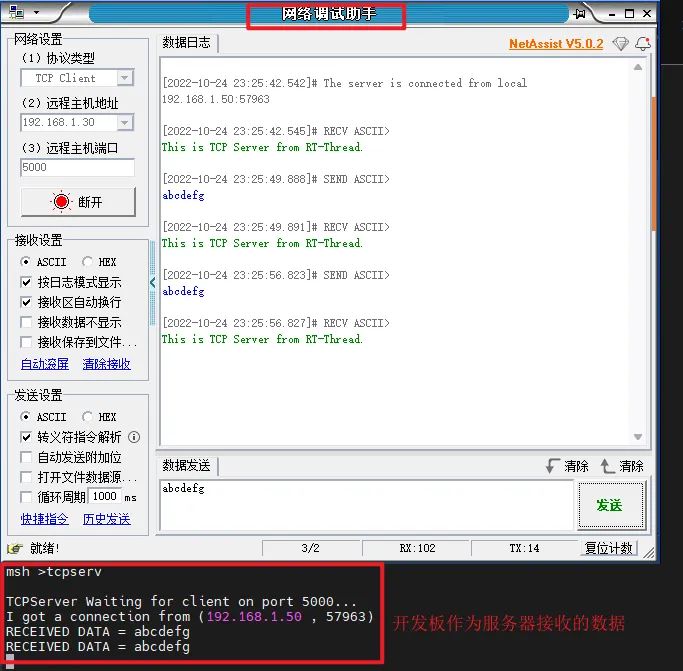
可以看到开发板接收到了客户端发过来的数据。
十一、总结
以上就是APM32F4系列,在RT-Thread系统上应用LwIP网络功能的详细过程。其实其他APM32带有以太网控制器的MCU,在RT-Thread使用LwIP网络功能也是大同小异的,按照这个过程基本都可以把网络功能应用起来。另外我也把RTT的以太网驱动文件源码上传了,以供大家参考。
注:文章作者在原帖中提供了工程文件,有需要请至原文21ic论坛下载
原文地址:https://bbs.21ic.com/icview-3271456-1-1.html
或点击下方 阅读原文 跳转


 0756 6299999
0756 6299999
info@geehy.com
www.geehy.com
广东省珠海市香洲区广湾街83号01栋
