

当U-Boot将设备树加载到内存指定位置后,ARM内核的SoC以通用寄存器r2来传递dtb在内存中的地址。kernel获取到该地址后对dtb文件做进一步的处理。
#设备树的传递
当使用bootm加载kernel镜像时(bootz是对bootm的一种封装以及功能扩展,实质一样)。U-Boot跳转到kernel的入口函数是boot_jump_linux
/* Subcommand: GO */static void boot_jump_linux(bootm_headers_t *images, int flag){...debug("## Transferring control to Linux (at address %08lx)" \"...\n", (ulong) kernel_entry);bootstage_mark(BOOTSTAGE_ID_RUN_OS);announce_and_cleanup(fake);if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)r2 = (unsigned long)images->ft_addr;elser2 = gd->bd->bi_boot_params;...}
r2作为存放设备树地址的寄存器,其取值有两种方式,分别是例化bootm_header_t这个数据结构的ft_addr,以及利用U-Boot的板级启动参数作为设备树的地址。
##bootm_header_t方式
数据结构bootm_header_t的定义如下,供各种内核的SoC使用,每家厂商根据自己CPU的特点对各个成员进行不同的例化。
/** Legacy and FIT format headers used by do_bootm() and do_bootm_() * routines.*/typedef struct bootm_headers {...char *ft_addr; /* flat dev tree address */ulong ft_len; /* length of flat device tree */...} bootm_headers_t;
用bootm_header_t的方式,U-Boot需支持设备树以及文件非空。
ft_len以及ft_addr属于bootm_header_t,在U-Boot解析镜像文件时,实例化这两个成员。函数调用栈如下:
do_bootz(struct cmd_tbl *cmdtp, int flag, int argc, char *const argv[])-bootz_start()--bootm_find_images(int flag, int argc, char *const argv[], ulong start,ulong size)---boot_get_fdt(flag, argc, argv, IH_ARCH_DEFAULT, &images,&images.ft_addr, &images.ft_len);u-boot-v2021.04/common/image-fdt.c
##gd->bd->bi_boot_params方式
这种属于比较古老的一种方式了,目前基本不会采用。bi_boot_params是一个存放内核启动参数的地址,通常是在板级初始化中进行指定。
代码执行到此处,r2是否为预期的值,一是可以通过打印的方式、再有使用调试工具连上去确认。
#kernel对设备树的解析
解析分两个阶段,第一阶段进行校验以及启动参数的再调整;第二阶段完成设备树的解压,也就是将设备树由FDT变成EDT,创建device_node。
##第一阶段
kernel启动日志中与设备树相关的第一条打印如下,也就是打印出当前硬件设备的模型名,"OF: fdt: Machine model: V2P-CA9"
Booting Linux on physical CPU 0x0Linux version 5.4.124 (qemu@qemu) (gcc version 6.5.0 (Linaro GCC 6.5-2018.12)) #3 SMP Fri Jun 25 15:26:02 CST 2021CPU: ARMv7 Processor [410fc090] revision 0 (ARMv7), cr=10c5387dCPU: PIPT / VIPT nonaliasing data cache, VIPT nonaliasing instruction cacheOF: fdt: Machine model: V2P-CA9
这个模型名是在设备树文件的头部定义的,定义当前设备的总体名称。
// SPDX-License-Identifier: GPL-2.0/** ARM Ltd. Versatile Express** CoreTile Express A9x4* Cortex-A9 MPCore (V2P-CA9)** HBI-0191B*//dts-v1/;/ {model = "V2P-CA9";...}
但这并不是kernel对设备树第一次进行处理的地方。在此之前已有其他的操作。函数调用栈如下:
setup_arch(char **cmdline_p) arch/arm/kernel/setup.catags_vaddr = FDT_VIRT_BASE(__atags_pointer);setup_machine_fdt(void *dt_virt) arch/arm/kernel/devtree.cearly_init_dt_verify()of_flat_dt_match_machine() drivers/of/fdt.cearly_init_dt_scan_nodes();__machine_arch_type = mdesc->nr;
第2行__atags_pointer是dtb在内存中的地址,这个地址在汇编阶段(若镜像为zImage,那么在解压缩阶段就完成了)便获取到了。由于执行到setup_arch时mmu已经使能并且4K的段页表也已经完成了映射,而U-Boot传递给kernel的设备树fdt地址属于物理地址,因此需要将物理地址转换成虚拟地址。
head-common.S.align 2.type __mmap_switched_data, %object__mmap_switched_data:.long _sdata @ r0.long __data_loc @ r1.long _edata_loc @ r2.long __bss_stop @ sp (temporary stack in .bss).long __bss_start @ r0.long __bss_stop @ r1.long init_thread_union + THREAD_START_SP @ sp.long processor_id @ r0.long __machine_arch_type @ r1.long __atags_pointer @ r2
第一阶段对设备树的配置主要包括:
A 对dtb文件进行crc32校验,检测设备树文件是否合法early_init_dt_verify()B early_init_dt_scan_nodes()/* Retrieve various information from the /chosen node */of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);/* Initialize {size,address}-cells info */of_scan_flat_dt(early_init_dt_scan_root, NULL);/* Setup memory, calling early_init_dt_add_memory_arch */of_scan_flat_dt(early_init_dt_scan_memory, NULL);C 更新__machine_arch_typeD 更新chosen
上面这个chosen信息可以在kernel起来后再次查看做了哪些修改。
##第二阶段
第二阶段单纯的是将设备树ABI文件进行解压缩,由FDT变成EDT,生成相应的device_node结点。
这个阶段的函数调用栈如下:
unflatten_device_tree();*__unflatten_device_tree()/* First pass, scan for size */size = unflatten_dt_nodes(blob, NULL, dad, NULL);/* Second pass, do actual unflattening */unflatten_dt_nodes(blob, mem, dad, mynodes);unflatten_dt_nodes()populate_node()
device_nodes结点如下:
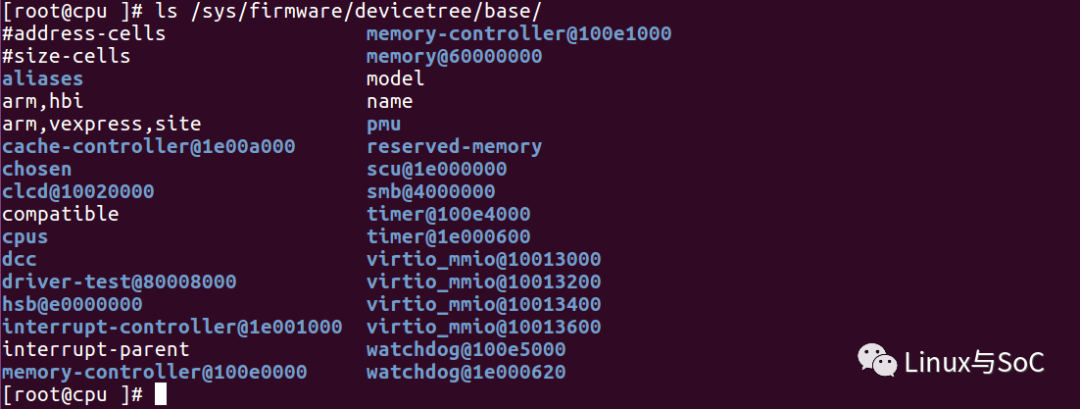
device_node创建完成后,kernel创建platform_device时依据这个阶段完成的工作情况进行对应的设备注册,供驱动代码使用。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
