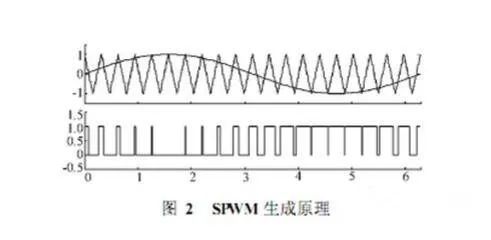
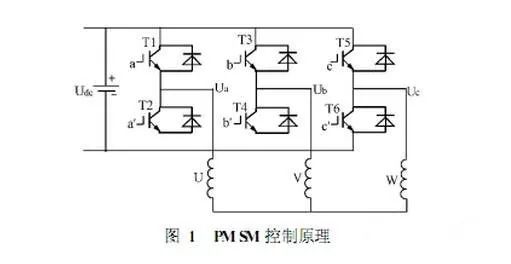
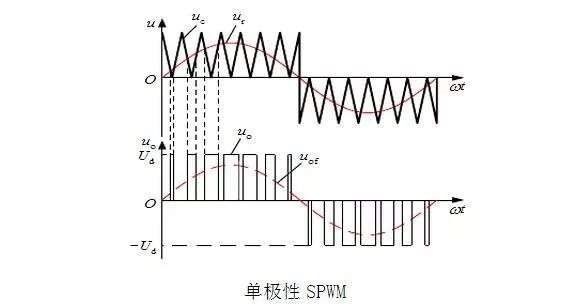
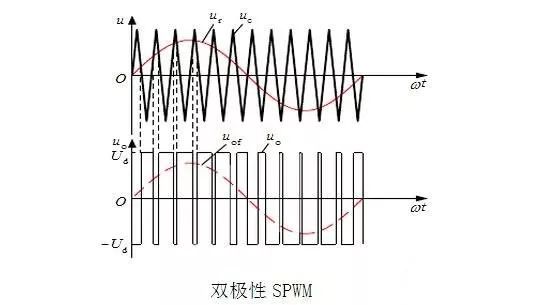
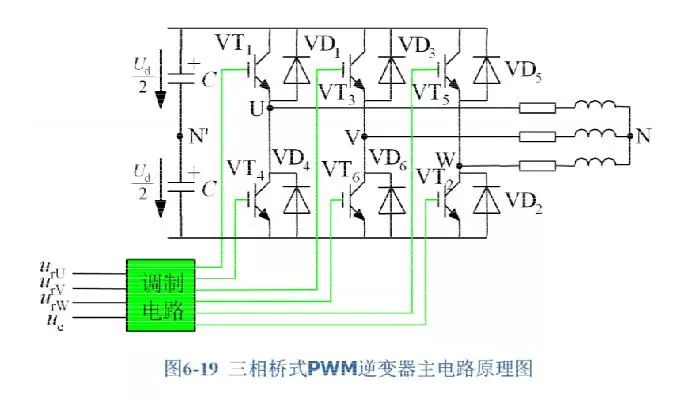
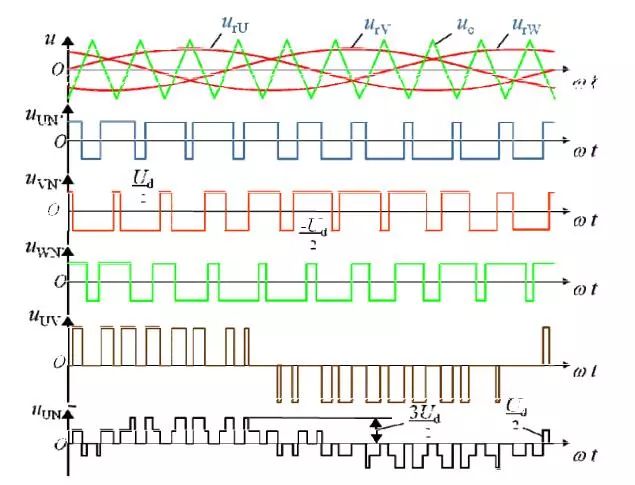
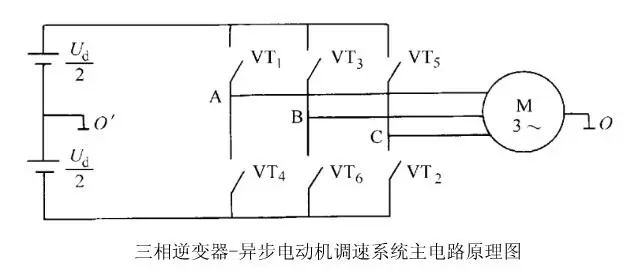
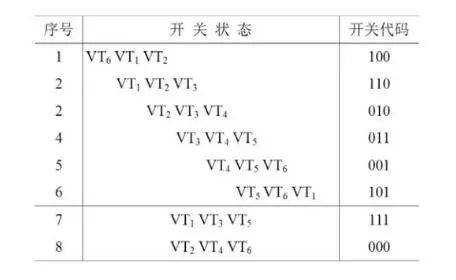
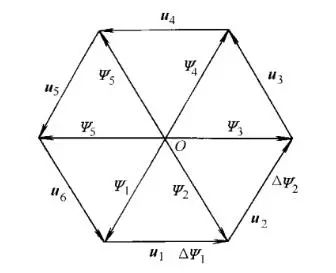
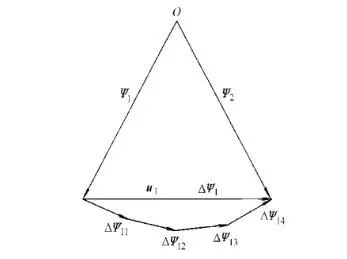
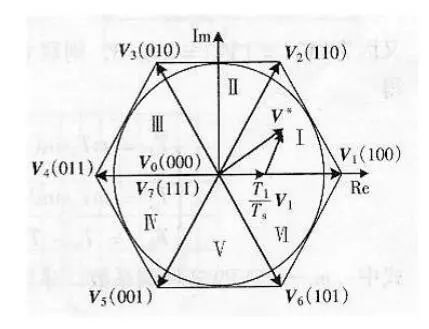
SPWM与SVPWM的原理
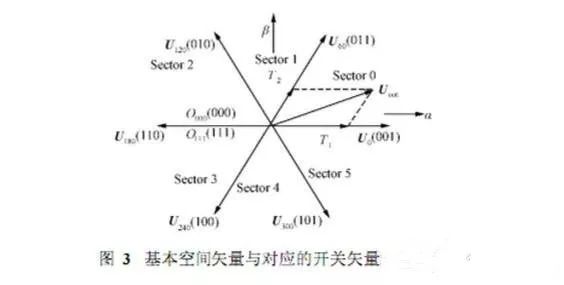
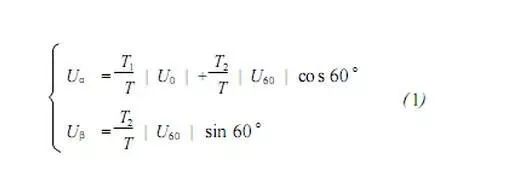
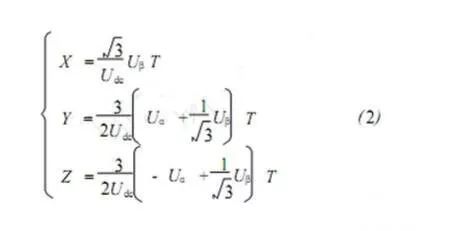
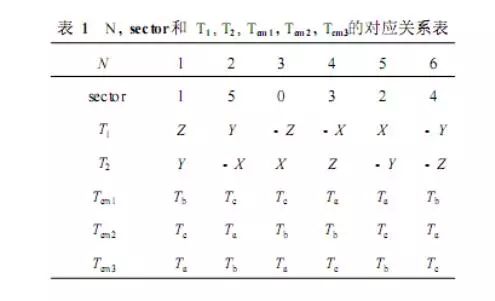
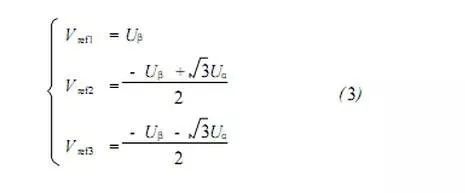
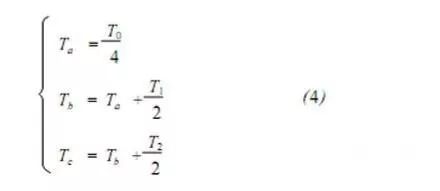
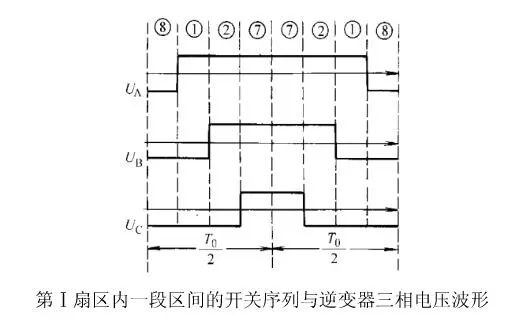
SPWM与SVPWM的算法
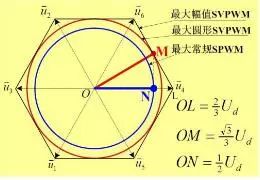
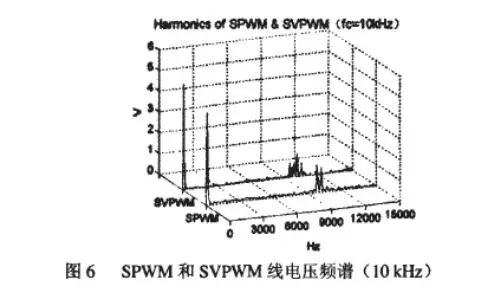
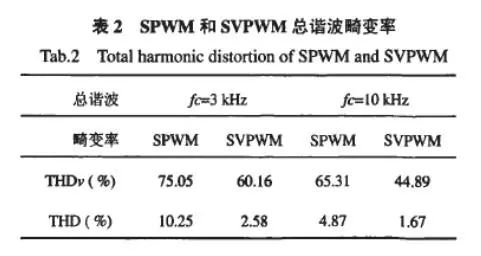
SPWM和SVPWM的对比
免责声明:本文系网络转载,版权归原作者所有。如本文所用视频、图片、文字如涉及作品版权问题,请在文末留言告知,我们将在第一时间处理!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。
推荐阅读