
转自:Mculover666
之前给大家分享过关于CMSIS的内容,比如:
Cortex-M微控制器软件接口标准CMSIS详细内容
CMSIS-DAP和J-Link、ST-Link是什么关系?
今天继续给大家分享由“Mculover666”整理的关于CMSIS的内容。
CMSIS-RTOS API是ARM公司为RTOS内核制定的一套通用接口协议,它提供了一套「标准的API接口」,可以移植到各种各样的RTOS上,使得上层的软件、中间件、库以及其他组件在不同的RTOS之上都可以正常工作。
这套API表现为两个文件:cmsis-os.h和cmsis-os.c,也就是说,不同的RTOS内核分别用自己的一套东西去适配.c文件中的接口,而用户只需要调用.h文件中给出的API编写应用。
本文会列举性的给出CMSIS-RTOS有哪些API和宏定义,并给出每类API的使用demo,学习者只需要了解这些东西,能看懂用CMSIS-RTOS API编写的应用程序即可~
在TencentOS-tiny中如下。
cmsis_os.h
cmsis_os.c
cmsis_os2.h
cmsis_os2.c
CMSIS-RTOS API的整体架构如下图: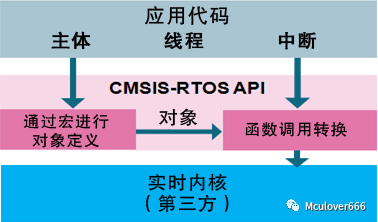
下面列出了 CMSIS-RTOS API v1.02 版本提供的所有API。
CMSIS-RTOS 所有API使用的错误码(cmsis-os.h):
typedef enum {
osOK = 0, ///< function completed; no error or event occurred.
osEventSignal = 0x08, ///< function completed; signal event occurred.
osEventMessage = 0x10, ///< function completed; message event occurred.
osEventMail = 0x20, ///< function completed; mail event occurred.
osEventTimeout = 0x40, ///< function completed; timeout occurred.
osErrorParameter = 0x80, ///< parameter error: a mandatory parameter was missing or specified an incorrect object.
osErrorResource = 0x81, ///< resource not available: a specified resource was not available.
osErrorTimeoutResource = 0xC1, ///< resource not available within given time: a specified resource was not available within the timeout period.
osErrorISR = 0x82, ///< not allowed in ISR context: the function cannot be called from interrupt service routines.
osErrorISRRecursive = 0x83, ///< function called multiple times from ISR with same object.
osErrorPriority = 0x84, ///< system cannot determine priority or thread has illegal priority.
osErrorNoMemory = 0x85, ///< system is out of memory: it was impossible to allocate or reserve memory for the operation.
osErrorValue = 0x86, ///< value of a parameter is out of range.
osErrorOS = 0xFF, ///< unspecified RTOS error: run-time error but no other error message fits.
os_status_reserved = 0x7FFFFFFF ///< prevent from enum down-size compiler optimization.
} osStatus;
CMSIS-RTOS API一些可选项控制是否开启(cmsis-os.h):
#define osFeature_MainThread 1 ///< main thread 1=main can be thread, 0=not available
#define osFeature_Pool 1 ///< Memory Pools: 1=available, 0=not available
#define osFeature_MailQ 1 ///< Mail Queues: 1=available, 0=not available
#define osFeature_MessageQ 1 ///< Message Queues: 1=available, 0=not available
#define osFeature_Signals 0 ///< maximum number of Signal Flags available per thread
#define osFeature_Semaphore 30 ///< maximum count for \ref osSemaphoreCreate function
#define osFeature_Wait 0 ///< osWait function: 1=available, 0=not available
#define osFeature_SysTick 1 ///< osKernelSysTick functions: 1=available, 0=not available
| API | 描述 |
|---|---|
| osKernelInitialize | 初始化RTOS内核 |
| osKernelStart | 启动RTOS内核 |
| osKernelRunning | Query if the RTOS kernel is running |
| osKernelSysTick (可选) | Get RTOS kernel system timer counter |
| osKernelSysTickFrequency (可选) | RTOS kernel system timer frequency in Hz |
| osKernelSysTickMicroSec (可选) | Convert microseconds value to RTOS kernel system timer value |
osKernelInitialize
osStatus osKernelInitialize(void);
返回值:status code
osKernelStart
osStatus osKernelStart(void);
返回值:status code
osKernelRunning
int32_t osKernelRunning(void);
返回值:0表示RTOS未启动,1表示RTOS已经启动
osKernelSysTick
uint32_t osKernelSysTick(void);
返回值:RTOS内核系统当前的时间
##连接符的作用是连接两个字符串,合为一个字符串。
CMSIS-RTOS API 存放线程参数管理的结构体如下:
typedef struct os_thread_def {
char *name; ///< Thread name
os_pthread pthread; ///< start address of thread function
osPriority tpriority; ///< initial thread priority
uint32_t instances; ///< maximum number of instances of that thread function
k_stack_t *stackbase; ///< base address of task
uint32_t stacksize; ///< stack size requirements in bytes; 0 is default stack size
k_timeslice_t timeslice; ///< timeslice
k_task_t *task;
} osThreadDef_t;
CMSIS-RTOS API 定义线程的宏如下:
#define osThreadDef(name, priority, instances, stacksz) \
k_task_t task_handler_##name; \
k_stack_t task_stack_##name[(stacksz)]; \
const osThreadDef_t os_thread_def_##name = \
{ #name, (os_pthread)(name), (osPriority)(priority), (instances), \
(&((task_stack_##name)[0])), (stacksz), ((k_timeslice_t)0u), (&(task_handler_##name)) }
宏定义中的 instances 表示基于此任务参数,创建出几个任务实例,比如instances为2,则会创建出两个任务。
CMSIS-RTOS API定义的获取线程参数结构体的宏如下:
#define osThread(name) \
&os_thread_def_##name
管理线程参数的API如下:
| API | 描述 |
|---|---|
| osThreadCreate | 创建线程并开始执行 |
| osThreadTerminate | 停止线程执行 |
| osThreadYield | 线程主动让出 |
| osThreadGetID | 获取当前正在运行线程的ID |
| osThreadSetPriority | 改变线程优先级 |
| osThreadGetPriority | 获取线程优先级 |
osThreadCreate
osThreadId osThreadCreate(const osThreadDef_t *thread_def, void *argument);
其中osThreadId被定义为k_task_t指针类型:
typedef k_task_t *osThreadId;
返回值:TencentOS-tiny中的任务控制块类型指针。
osThreadTerminate
osStatus osThreadTerminate(osThreadId thread_id);
返回值:osStatus
osThreadYield
osStatus osThreadYield(void);
返回值:osStatus
osThreadGetID
osThreadId osThreadGetId(void);
osThreadSetPriority
osStatus osThreadSetPriority(osThreadId thread_id, osPriority priority);
osThreadGetPriority
osPriority osThreadGetPriority(osThreadId thread_id);
使用时需要特别注意,在TencentOS-tiny中,调用CMSIS-RTOS API提供的优先级选项设置之后,实际设置的任务值是不同的。
CMSIS-RTOS API提供的线程优先级宏定义如下:
typedef enum {
osPriorityIdle = -3, ///< priority: idle (lowest)
osPriorityLow = -2, ///< priority: low
osPriorityBelowNormal = -1, ///< priority: below normal
osPriorityNormal = 0, ///< priority: normal (default)
osPriorityAboveNormal = +1, ///< priority: above normal
osPriorityHigh = +2, ///< priority: high
osPriorityRealtime = +3, ///< priority: realtime (highest)
osPriorityError = 0x84 ///< system cannot determine priority or thread has illegal priority
} osPriority;
在TecentOS-tiny中实现的时候进行了转化:
static k_prio_t priority_cmsis2knl(osPriority prio)
{
if (prio == osPriorityError) {
return K_TASK_PRIO_INVALID;
}
return (k_prio_t)(3 - prio);
}
static osPriority priority_knl2cmsis(k_prio_t prio)
{
return (osPriority)(3 - prio);
}
比如创建线程时设置为 osPriorityNormal=0,则「实际设置的任务优先级为3」。
CMSIS-RTOS提供的等待函数API如下:
| API | 描述 |
|---|---|
| osDelay | 等待指定的时间 |
| osWait(可选) | 等待信号、消息、邮箱的某个事件 |
osDelay
osStatus osDelay(uint32_t millisec);
返回值:osStatus。
CMSIS-RTOS API提供的存储定时器参数的结构体如下:
typedef struct os_timer_def {
os_ptimer cb; ///< start address of a timer function
k_timer_t *timer;
} osTimerDef_t;
CMSIS-RTOS API提供的定义一个软件定时器的宏定义如下:
#define osTimerDef(name, function) \
k_timer_t timer_handler_##name; \
const osTimerDef_t os_timer_def_##name = \
{ (os_ptimer)(function), (&(timer_handler_##name)) }
CMSIS-RTOS API定义的获取软件定时器参数结构体的宏如下:
#define osTimer(name) \
&os_timer_def_##name
CMSIS-RTOS API提供的软件定时器管理API如下:
| API | 描述 |
|---|---|
| osTimerCreate | 创建一个软件定时器 |
| osTimerStart | 启动软件定时器 |
| osTimerStop | 停止软件定时器 |
| osTimerDelete | 删除软件定时器 |
osTimerCreate
osTimerId osTimerCreate(const osTimerDef_t *timer_def, os_timer_type type, void *argument);
其中osTimerId被定义为k_timer_t指针类型:
typedef k_timer_t *osTimerId;
type参数为 os_timer_type 类型,表示软件定时器的类型为单次触发或者周期触发:
typedef enum {
osTimerOnce = 0, ///< one-shot timer
osTimerPeriodic = 1 ///< repeating timer
} os_timer_type;
osTimerStart
osStatus osTimerStart(osTimerId timer_id, uint32_t millisec);
返回值:osStatus。
osTimerStop
osStatus osTimerStop(osTimerId timer_id)
返回值:osStatus。
osTimerDelete
osStatus osTimerDelete(osTimerId timer_id);
返回值:osStatus。
CMSIS-RTOS API提供的存储信号量参数的结构体如下:
typedef struct os_semaphore_def {
uint32_t dummy; ///< dummy value.
k_sem_t *sem;
} osSemaphoreDef_t;
CMSIS-RTOS API提供的定义一个信号量的宏定义如下:
#define osSemaphoreDef(name) \
k_sem_t sem_handler_##name; \
const osSemaphoreDef_t os_semaphore_def_##name = { 0, (&(sem_handler_##name)) }
CMSIS-RTOS API定义的获取信号量参数结构体的宏如下:
#define osSemaphore(name) \
&os_semaphore_def_##name
CMSIS-RTOS API提供的信号量管理API如下:
| API | 描述 |
|---|---|
| osSemaphoreCreate | 创建一个信号量 |
| osSemaphoreWait | 等待信号量 |
| osSemaphoreRelease | 释放信号量 |
| osSemaphoreDelete | 删除信号量 |
osSemaphoreCreate
osSemaphoreId osSemaphoreCreate(const osSemaphoreDef_t *semaphore_def, int32_t count);
其中 osSemaphoreId 被定义为k_sem_t指针类型:
typedef k_sem_t *osSemaphoreId;
osSemaphoreWait
int32_t osSemaphoreWait(osSemaphoreId semaphore_id, uint32_t millisec);
返回值:int32_t ,正常返回当前count数,失败返回-1。
如果需要阻塞延时,参数应该设置为CMSIS-RTOS API提供的宏定义 osWaitForever :
#define osWaitForever 0xFFFFFFFF ///< wait forever timeout value
osSemaphoreRelease
osStatus osSemaphoreRelease(osSemaphoreId semaphore_id);
返回值:osStatus。
osSemaphoreDelete
osStatus osSemaphoreDelete(osSemaphoreId semaphore_id);
返回值:osStatus。
CMSIS-RTOS API提供的存储互斥锁参数的结构体如下:
typedef struct os_mutex_def {
uint32_t dummy; ///< dummy value.
k_mutex_t *mutex;
} osMutexDef_t;
CMSIS-RTOS API提供的定义一个互斥锁的宏定义如下:
#define osMutexDef(name) \
k_mutex_t mutex_handler_##name; \
const osMutexDef_t os_mutex_def_##name = { 0, (&(mutex_handler_##name)) }
CMSIS-RTOS API定义的获取互斥锁参数结构体的宏如下:
#define osMutex(name) \
&os_mutex_def_##name
CMSIS-RTOS API提供的互斥锁管理API如下:
| API | 描述 |
|---|---|
| osMutexCreate | 创建一个互斥锁 |
| osMutexWait | 等待获取互斥锁 |
| osMutexRelease | 释放互斥锁 |
| osMutexDelete | 删除互斥锁 |
osMutexCreate
osMutexId osMutexCreate(const osMutexDef_t *mutex_def);
其中 osMutexId 被定义为k_mutex_t指针类型:
typedef k_mutex_t *osMutexId;
osMutexWait
osStatus osMutexWait(osMutexId mutex_id, uint32_t millisec);
返回值:osStatus 。
如果需要阻塞延时,参数应该设置为CMSIS-RTOS API提供的宏定义 osWaitForever :
#define osWaitForever 0xFFFFFFFF ///< wait forever timeout value
osMutexRelease
osStatus osMutexRelease(osMutexId mutex_id);
返回值:osStatus。
osMutexDelete
osStatus osMutexDelete(osMutexId mutex_id);
返回值:osStatus。
CMSIS-RTOS API提供的存储静态内存池参数的结构体如下:
typedef struct os_pool_def {
uint32_t pool_sz; ///< number of items (elements) in the pool
uint32_t item_sz; ///< size of an item
void *pool; ///< pointer to memory for pool
k_mmblk_pool_t *mmblk_pool; ///< memory blk pool handler
} osPoolDef_t;
CMSIS-RTOS API提供的定义一个互斥锁的宏定义如下:
#define osPoolDef(name, no, type) \
k_mmblk_pool_t mmblk_pool_handler_##name; \
uint8_t mmblk_pool_buf_##name[(no) * sizeof(type)]; \
const osPoolDef_t os_pool_def_##name = \
{ (no), sizeof(type), (&((mmblk_pool_buf_##name)[0])), (&(mmblk_pool_handler_##name)) }
CMSIS-RTOS API定义的获取互斥锁参数结构体的宏如下:
#define osPool(name) \
&os_pool_def_##name
CMSIS-RTOS API提供的互斥锁管理API如下:
| API | 描述 |
|---|---|
| osPoolCreate | 创建一块固定大小的静态内存池 |
| osPoolAlloc | 申请分配内存 |
| osPoolCAlloc | 申请分配一块内存并全部初始化为0 |
| osPoolFree | 申请回收内存 |
osPoolCreate
osPoolId osPoolCreate(const osPoolDef_t *pool_def);
其中 osPoolId 被定义为 k_mmblk_pool_t 指针类型:
typedef k_mmblk_pool_t *osPoolId;
osPoolAlloc
void *osPoolAlloc(osPoolId pool_id);
osPoolCAlloc
void *osPoolCAlloc(osPoolId pool_id);
osPoolFree
osStatus osPoolFree(osPoolId pool_id, void *block);
返回值:osStatus。
CMSIS-RTOS API提供的存储消息队列参数的结构体如下:
typedef struct os_messageQ_def {
uint32_t queue_sz; ///< number of elements in the queue
uint32_t item_sz; ///< size of an item
void *pool; ///< memory array for messages
k_msg_q_t *queue; ///< queue handler
} osMessageQDef_t;
CMSIS-RTOS API提供的定义一个消息队列的宏定义如下:
#define osMessageQDef(name, queue_sz, type) \
k_msg_q_t msg_q_handler_##name; \
const osMessageQDef_t os_messageQ_def_##name = \
{ (queue_sz), sizeof(type), NULL, (&(msg_q_handler_##name)) }
CMSIS-RTOS API定义的获取消息队列参数结构体的宏如下:
#define osMessageQ(name) \
&os_messageQ_def_##name
CMSIS-RTOS API提供的消息队列管理API如下:
| API | 描述 |
|---|---|
| osMessageCreate | 初始化一个消息队列 |
| osMessagePut | 向消息队列中加入数据 |
| osMessageGet | 从消息队列中取出数据 |
osMessageCreate
osMessageQId osMessageCreate(const osMessageQDef_t *queue_def, osThreadId thread_id);
其中 osMessageQId 被定义为 k_msg_q_t 指针类型:
typedef k_msg_q_t *osMessageQId;
osMessagePut
osStatus osMessagePut(osMessageQId queue_id, uint32_t info, uint32_t millisec);
返回值:osStatus 。
因为TencentOS-tiny中消息队列实现机制的不同,此API中的 millisec 参数未用到。
osMessageGet
osEvent osMessageGet(osMessageQId queue_id, uint32_t millisec);
返回值:osEvent ,其中包含了事件信息和错误码,以及消息队列收到的值。
如果需要阻塞延时,参数应该设置为CMSIS-RTOS API提供的宏定义 osWaitForever :
#define osWaitForever 0xFFFFFFFF ///< wait forever timeout value
#include <cmsis_os.h>
void task1_entry(void *arg)
{
while(1)
{
printf("task1 is running...\r\n");
osDelay(1000);
}
}
osThreadDef(task1_entry, osPriorityNormal, 1, 512);
void task2_entry(void *arg)
{
while(1)
{
printf("task2 is running...\r\n");
osDelay(1000);
}
}
osThreadDef(task2_entry, osPriorityNormal, 1, 512);
void application_entry(void *arg)
{
osThreadCreate(osThread(task1_entry), NULL);
osThreadCreate(osThread(task2_entry), NULL);
return;
}
任务运行结果如下:
task1 is running...
task2 is running...
task1 is running...
task2 is running...
task1 is running...
task2 is running...
#include <cmsis_os.h>
void timer1_cb(void *arg)
{
printf("timer1 is timeout!\r\n");
}
void timer2_cb(void *arg)
{
printf("timer2 is timeout!\r\n");
}
osTimerDef(timer1, timer1_cb);
osTimerDef(timer2, timer2_cb);
void application_entry(void *arg)
{
osTimerId timer1;
osTimerId timer2;
timer1 = osTimerCreate(osTimer(timer1), osTimerOnce, NULL);
timer2 = osTimerCreate(osTimer(timer2), osTimerPeriodic, NULL);
osTimerStart(timer1, 5000);
osTimerStart(timer2, 1000);
return;
}
运行结果如下:
timer2 is timeout!
timer2 is timeout!
timer2 is timeout!
timer2 is timeout!
timer1 is timeout!
timer2 is timeout!
timer2 is timeout!
timer2 is timeout!
timer2 is timeout!
#include <cmsis_os.h>
osSemaphoreId sync_sem_id;
osSemaphoreDef(sync_sem);
void task1_entry(void *arg)
{
while(1)
{
printf("task1 is waiting sem forever...\r\n");
osSemaphoreWait(sync_sem_id, osWaitForever);
printf("task1 get sem!\r\n");
}
}
osThreadDef(task1_entry, osPriorityNormal, 1, 512);
void task2_entry(void *arg)
{
while(1)
{
printf("task2 will release a sem...\r\n");
osSemaphoreRelease(sync_sem_id);
osDelay(1000);
}
}
osThreadDef(task2_entry, osPriorityNormal, 1, 512);
void application_entry(void *arg)
{
sync_sem_id = osSemaphoreCreate(osSemaphore(sync_sem), 0);
osThreadCreate(osThread(task1_entry), NULL);
osThreadCreate(osThread(task2_entry), NULL);
return;
}
运行结果为:
task1 is waiting sem forever...
task1 get sem!
task1 is waiting sem forever...
task2 will release a sem...
task1 get sem!
task1 is waiting sem forever...
task2 will release a sem...
task1 get sem!
task1 is waiting sem forever...
task2 will release a sem...
task1 get sem!
task1 is waiting sem forever...
task2 will release a sem...
task1 get sem!
task1 is waiting sem forever...
#include <cmsis_os.h>
osMutexId sync_mutex_id;
osMutexDef(sync_mutex);
void task1_entry(void *arg)
{
while(1)
{
osMutexWait(sync_mutex_id, osWaitForever);
printf("task1 get mutex,doing sth...\r\n");
HAL_Delay(1000); //死循环占用CPU
printf("task1 finish do sth!\r\n");
osMutexRelease(sync_mutex_id);
osDelay(1000);
}
}
osThreadDef(task1_entry, osPriorityHigh, 1, 512);
void task2_entry(void *arg)
{
while(1)
{
osMutexWait(sync_mutex_id, osWaitForever);
printf("task2 get mutex,doing sth...\r\n");
HAL_Delay(2000); //死循环占用CPU
printf("task2 finish do sth!\r\n");
osMutexRelease(sync_mutex_id);
osDelay(1000);
}
}
osThreadDef(task2_entry, osPriorityNormal, 1, 512);
void application_entry(void *arg)
{
sync_mutex_id = osMutexCreate(osMutex(sync_mutex));
osThreadCreate(osThread(task1_entry), NULL);
osThreadCreate(osThread(task2_entry), NULL);
return;
}
运行结果为:
task1 get mutex,doing sth...
task1 finish do sth!
task2 get mutex,doing sth...
task2 finish do sth!
task1 get mutex,doing sth...
task1 finish do sth!
task1 get mutex,doing sth...
task1 finish do sth!
task2 get mutex,doing sth...
#include <cmsis_os.h>
typedef struct blk_st {
int id;
char* payload;
} blk_t;
#define MMBLK_BLK_NUM 10
osPoolDef (MemPool, MMBLK_BLK_NUM, blk_t);
osPoolId mem_pool_id;
void task1_entry(void *arg)
{
blk_t *ptr = NULL;
osStatus err;
/* 打印出一个块的大小 */
printf("block size is %d bytes\r\n", sizeof(blk_t));
/* 申请一个块 */
ptr = osPoolAlloc(mem_pool_id);
if (ptr == NULL) {
printf("a mmblk alloc fail\r\n");
return;
}
else {
printf("a mmblk alloc success\r\n");
}
/* 使用该块 */
ptr->id = 1;
ptr->payload = "hello";
printf("mmblk id:%d payload:%s\r\n", ptr->id, ptr->payload);
/* 使用完毕之后释放 */
err = osPoolFree(mem_pool_id, ptr);
if (err != osOK) {
printf("a mmblk free fail, err = %d\r\n", err);
return;
}
else {
printf("a mmblk free success\r\n");
}
while (1) {
tos_task_delay(1000);
}
}
#define STK_SIZE_TASK1 1024
osThreadDef(task1_entry, osPriorityNormal, 1, STK_SIZE_TASK1);
void application_entry(void *arg)
{
//初始化静态内存池
mem_pool_id = osPoolCreate(osPool(MemPool));
if (mem_pool_id == NULL) {
printf("mmblk pool create fail\r\n");
return;
}
else {
printf("mmblk pool create success\r\n");
}
//创建任务
osThreadCreate(osThread(task1_entry), NULL);
return;
}
运行结果为:
mmblk pool create success
block size is 8 bytes
a mmblk alloc success
mmblk id:1 payload:hello
a mmblk free success
#include <cmsis_os.h>
#define STK_SIZE_TASK_RECEIVER 512
#define STK_SIZE_TASK_SENDER 512
#define MESSAGE_MAX 10
osMessageQId msg_q_id;
osMessageQDef(msg_q,MESSAGE_MAX,uint32_t);
void task_receiver_entry(void *arg)
{
osEvent event;
osStatus ret;
uint32_t value;
while (1)
{
event = osMessageGet(msg_q_id, osWaitForever);
ret = event.status;
if (ret == osOK)
{
value = event.value.v;
printf("receiver: msg incoming[%s]\r\n", (char*)value);
}
}
}
osThreadDef(task_receiver_entry, osPriorityNormal, 1, STK_SIZE_TASK_RECEIVER);
void task_sender_entry(void *arg)
{
char *msg_prio_0 = "msg 0";
char *msg_prio_1 = "msg 1";
char *msg_prio_2 = "msg 2";
printf("sender: post a messgae:[%s]\r\n", msg_prio_2);
osMessagePut(msg_q_id,(uint32_t)msg_prio_2,0);
printf("sender: post a messgae:[%s]\r\n", msg_prio_1);
osMessagePut(msg_q_id,(uint32_t)msg_prio_1,0);
printf("sender: post a messgae:[%s]\r\n", msg_prio_0);
osMessagePut(msg_q_id,(uint32_t)msg_prio_0,0);
}
osThreadDef(task_sender_entry, osPriorityNormal, 1, STK_SIZE_TASK_SENDER);
void application_entry(void *arg)
{
msg_q_id = osMessageCreate(osMessageQ(msg_q),NULL);
osThreadCreate(osThread(task_receiver_entry), NULL);
osThreadCreate(osThread(task_sender_entry), NULL);
return;
}
运行结果为:
sender: post a messgae:[msg 2]
sender: post a messgae:[msg 1]
sender: post a messgae:[msg 0]
receiver: msg incoming[msg 2]
receiver: msg incoming[msg 1]
receiver: msg incoming[msg 0]
文本或代码中 \n 和 \r 的区别
几个类似 VS Code的开源编辑器工具
STM32中CRC计算单元,及CRC校验的应用

长按前往图中包含的公众号关注
