1 概述
采用 LoRa 技术进行无线通讯,考虑到产品的实际需求,增加了产品的 OTA 固件升级的功能。因为 LoRa 通讯速度较慢,合理的减小 APP 区域固件的大小加快固件升级的速度变的尤为重要,于是就开启了优化调整 APP 区域固件大小之旅。
代码中使用到了 STM32_Cryptographic_Library、STM32_Std_Library 和 LoRa 驱动库,这些库编译之后的体积较大,猜想能不能将所有的这些库文件放在 Bootload 进行固化,然后封装好接口供 APP 调用,顺着这个思路开启了优化之路。
2 调试之路
2.1 想法
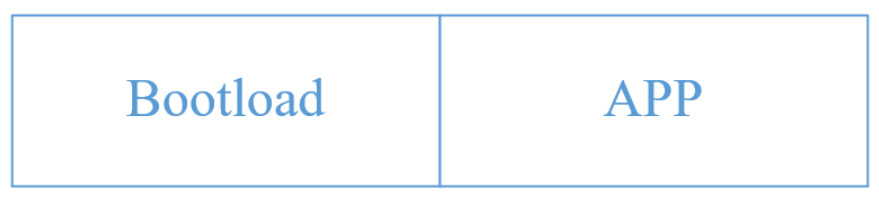
常见的固件升级是将片内 Flash 分为 Bootload 区域和 APP 区域(如下图所示),由 APP 区域接收新固件存储在片内或者片外 Flash,然后置升级的标志位并跳转到 Bootload,在 Bootload 完成新固件的更新工作。这样实现比较常规,但是由于 APP 中包含了多种库导致目标文件比较大,LoRa 通讯速率又不高会使整个升级时间很长。
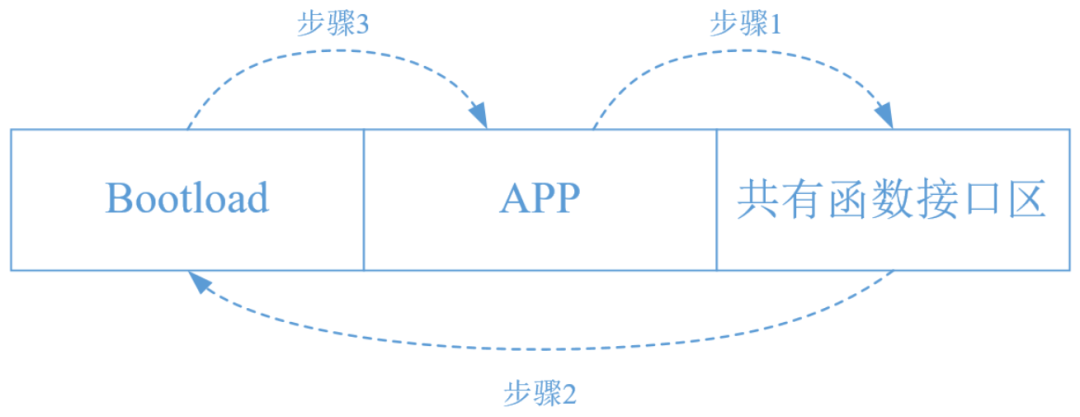
为了减小 APP 的大小,考虑将使用到库文件都固化在 Bootload 内,将片内 Flash 分为三个区域(如下图所示),增加一个共有函数区域,用于存放 Bootload 中封装好的接口。在函数调用时,如果 APP 调用的是共有函数,那么首先去共有函数区域找到函数在 Flash 中的地址,然后到 Bootload 中的对应位置执行相应的代码,再讲执行结果返回给 APP 区域,整个调用过程如下所示。
2.2 函数和变量定义在绝对地址的实现
有了上面的想法,首先需要验证的是如何将函数和变量放置在 Flash 的固定位置处,这样每次在调用固定位置处的接口就能找到 Bootload 中固化的代码接口。查阅相关资料,了解到 IAR 中的具体实现如下:
2.2.1 IAR的扩展关键字
@ 用于函数变量的绝对地址定位,将函数变量等放到指定的 section
__no_init禁止系统启动时初始化变量
__root 保证没有使用的函数或者变量也能够包含在目标代码中
2.2.2 函数的绝对定位
要将函数定义在绝对位置,需要在函数定义时后面加上
1void fun1(int a, int b) @".MY_SECTION"
2{
3 ... // 函数内容
4}
然后在链接文件 .icf 中添加如下内容。其中 0x08010000 表示在 Flash 中的地址,.MY_SECTION 必须与函数 @ 后面双引号中内容一致
1place at address mem:0x08010000 { readonly section .MY_SECTION};
2.2.3 变量的绝对定位
示例如下,变量绝对定位,无须修改 .icf 链接文件,直接指定具体位置即可。
1__no_init char array1[100]@0x2000B000;2.2.4 常量的绝对定位
常量的绝对定位示例如下:
1__root const int str1[4]@".MYSEG" = {1, 2, 3, 4};
常量绝对定位,需要改.icf文件,示例如下:
1place at address mem:0x08018500 { readonly section .MYSEG};
2.2.4 .c文件的绝对定位
要将 test.c 文件定位到 Flash 的绝对地址,那么在 .icf文件中应该按照如下格式添加:
1place at address mem:0x08018000 { section .text object test.o };
编译完成后整个 test.c 文件的所有函数,都在 0x08018000 之后。
2.3 Bootload 共有函数的实现
考虑到在初期编写代码时共有函数是可能发生变化的,如果按照上述的方法一个一个将函数放在固定的位置不是很方便,因此采用数组的方式将所有的共有函数放置在一起,如下所示:
1__root const uint32_t func_table[]@".COMMON_FUNC_SEG" = {
2
3 (uint32_t)&fun1, /** 00 */
4
5 (uint32_t)&fun2, /** 01 */
6
7 (uint32_t)&fun3, /** 02 */
8
9}
按照上面数组的方式将所有共有函数集合在一起,然后再 .icf 链接文件中将该数组放置在固定位置处,这样在 0x08010000 位置处依次就能找到定义的所有共有函数(每个成员是函数对象的地址,占 4 个字节)。
1/** 将数组放置在固定位置 */
2
3place at address mem:0x08010000 { readonly section .COMMON_FUNC_SEG};
2.4 APP 共有函数的使用
按照上述的方法可以将所有的库函数封装好并固化在 Bootload 中,并且实现了将所有的共有函数接口放置在固定的位置,在 APP 区可以使用函数指针的方式进行访问,示例如下:
1/** 1. 声明 */
2
3typedef int (*app_fun1)(int a, int b);
4
5typedef void (*app_fun2)(void);
6
7typedef char *(*app_fun3)(char *p);
8
9/** 2. 定义函数指针类型的变量 */
10
11app_fun1 fun1;
12
13app_fun2 fun2;
14
15app_fun1 fun3;
16
17/** 3. 共有函数的重定义 */
18
19#define FUNC_TABLE_ADDR (0x08010000) /** 共有函数的首地址 */
20
21void redefine_common_function(void)
22
23{
24
25 uint32_t *func_table_addr = (uint32_t *)FUNC_TABLE_ADDR;
26
27 fun1 = (app_fun1)func_table_addr[0]; /* 00 */
28
29 fun2 = (app_fun2)func_table_addr[1]; /* 01 */
30
31 fun3 = (app_fun3)func_table_addr[2]; /* 02 */
32
33}
通过上面的方式就能在 APP 区域调用 Bootload 中固化的接口了,不过要注意这种方式调试起来不是很方便,需要前期验证好 Bootload 中封装的接口有没有问题。
3 注意事项
按照上述的方法操作时有一些注意事项如下:
1. 固件更新区的绝对定位的函数,不能随意调用其他库函数,那些被调用的函数也必须是绝对定位的。
2. 绝对定位的函数,如果要使用常量,那么被使用的常量也必须是绝对定位的。
3. 绝对定位的函数,如果要使用全局变量,那么被使用的常量也必须是绝对定位的,而局部变量则不受此限制。
4 调试坎坷之路
上面的想法很有新意,在调试时自己封装的接口文件也经过了验证,但是在 APP 调用共有函数时程序还是跑飞了,经过不断的分析现实线现象,找到了问题的根源所在。STM32 标准库在进行时钟配置时定义了两个全局的数组如下,由于开始没有注意到这两个全局数组,而这两个全局数组是在 Bootload 区域定义的,跳转到 APP 区域后会对栈空间重新初始化,原本放这两个数组的位置就被初始化其他数值了,到时时钟配置出错。
1/** stm32f10x_rcc.c */
2
3static __I uint8_t APBAHBPrescTable[16] = {0, 0, 0, 0, 1, 2, 3, 4, 1, 2, 3, 4, 6, 7, 8, 9};
4
5static __I uint8_t ADCPrescTable[4] = {2, 4, 6, 8};
分析后的解决办法如下,因为这两个全局数据需要在 Bootload 区域中使用,而 Bootload 需要进行固化,所以需要将这两个数组放置固定的位置,这样每次使用到该数组时就回去固定的位置找,就不会出现被误修改的情况了。修改方式如下:
1__root const uint8_t APBAHBPrescTable[16]@".AHBAPB_PRESC_TABLE"={0, 0, 0, 0, 1, 2, 3, 4, 1, 2, 3, 4, 6, 7, 8, 9};
2
3__root const uint8_t ADCPrescTable[4]@".ADC_PRESC_TABLE"={2, 4, 6, 8};
4
5/** 对应的修改 .icf 文件 */
6
7place at address mem:0x08010000 { readonly section .AHBAPB_PRESC_TABLE};
8
9place at address mem:0x08010010 { readonly section .ADC_PRESC_TABLE};
5 补充
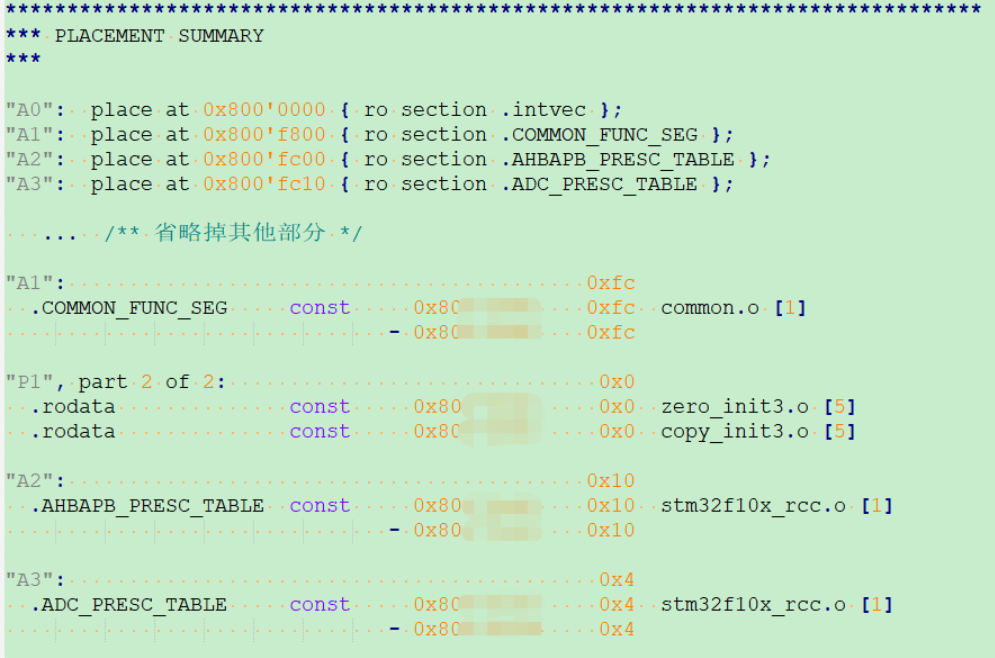
上述讲解了在 Bootload 和 APP 中共有函数的定义和使用,怎么验证是不是将其定义在绝对地址了呢?我们可以查看编译后生成的 map 文件,如下所示,可以看到在 map 文件中可以找到定义的 section。
————————————————
版权声明:本文为RT-Thread论坛用户「crystal266」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://club.rt-thread.org/ask/article/fa68bea40877eec3.html

