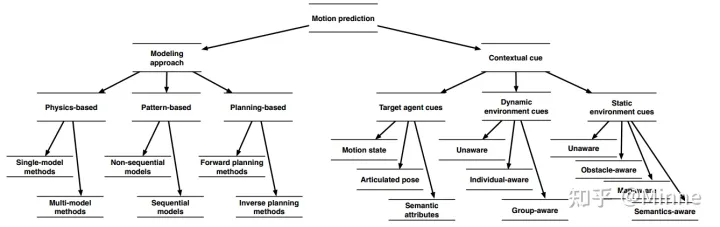
基于规划的方法本质上是map-aware 与 abstacle-aware,很自然地使用语义线索进行扩展。通常情况下,他们会将情境复杂性编码到目标/奖励方程中,但这可能无法恰当地整合动态线输入。因此,作者必须设计具体的修改,将动态输入纳入预测算法(Jump Markov Processes、local adaptations of the predicted trajectory、game-theoretic)。与基于学习的方法不同,目标输入很容易被合并,因为前向与逆向的规划过程都基于同一个目标动态模型。问题2:轨迹预测的问题现在已经解决了吗?轨迹预测的需求很大程度上取决于应用领域和其中的特定用例场景。短期内可能不能说轨迹预测这个问题已经解决了。以汽车行业举例,因为有专门的标准规定,定义了最大速度、交通规则、行人速度和加速度的分布,以及车辆舒适加速/减速率的规范,其在制定需求和提出的解决方案方面似乎是最成熟的。可以说对于智能汽车的AEB功能,解决方案已经达到了允许工业化生产消费产品的性能水平,对于其所需用例已经解决。至于其他用例,则需要在不久的将来对需求进行更多的标准化和明确的表述。并且对于鲁棒性与稳定性还需要演进。所以在回答轨迹预测是否已经解决这个问题之前,最起码应该把标准定了。当前对于机器人领域来说
Schreier M. Bayesian environment representation, prediction, and criticality assessment for driver assistance systems[J]. at-Automatisierungstechnik, 2017, 65(2): 151-152.
Rudenko A, Palmieri L, Herman M, et al. Human motion trajectory prediction: A survey[J]. The International Journal of Robotics Research, 2020, 39(8): 895-935.
Bahram M, Hubmann C, Lawitzky A, et al. A combined model-and learning-based framework for interaction-aware maneuver prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1538-1550.
Weidl G, Madsen A L, Kasper D, et al. Optimizing Bayesian networks for recognition of driving maneuvers to meet the automotive requirements[C]//2014 IEEE International Symposium on Intelligent Control (ISIC). IEEE, 2014: 1626-1631.
Zeng W, Liang M, Liao R, et al. LaneRCNN: Distributed Representations for Graph-Centric Motion Forecasting[J]. arXiv preprint arXiv:2101.06653, 2021.
Gao J, Sun C, Zhao H, et al. Vectornet: Encoding hd maps and agent dynamics from vectorized representation[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 11525-11533.
Gilles T, Sabatini S, Tsishkou D, et al. HOME: Heatmap Output for future Motion Estimation[J]. arXiv preprint arXiv:2105.10968, 2021.
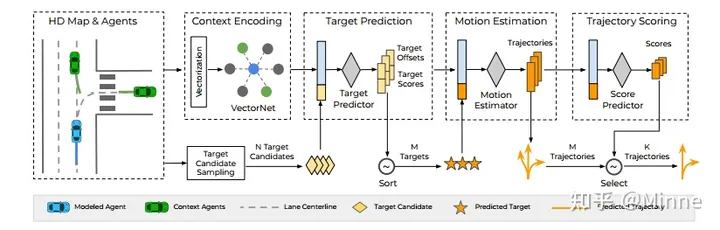
Zhao H, Gao J, Lan T, et al. Tnt: Target-driven trajectory prediction[J]. arXiv preprint arXiv:2008.08294, 2020.
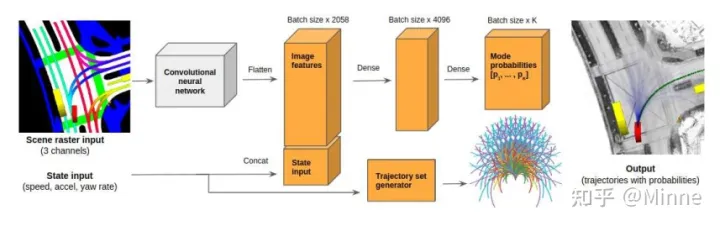
Phan-Minh T, Grigore E C, Boulton F A, et al. Covernet: Multimodal behavior prediction using trajectory sets[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 14074-14083.
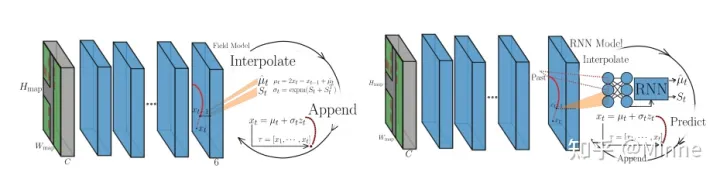
Rhinehart N, Kitani K M, Vernaza P. R2p2: A reparameterized pushforward policy for diverse, precise generative path forecasting[C]//Proceedings of the European Conference on Computer Vision (ECCV). 2018: 772-788.
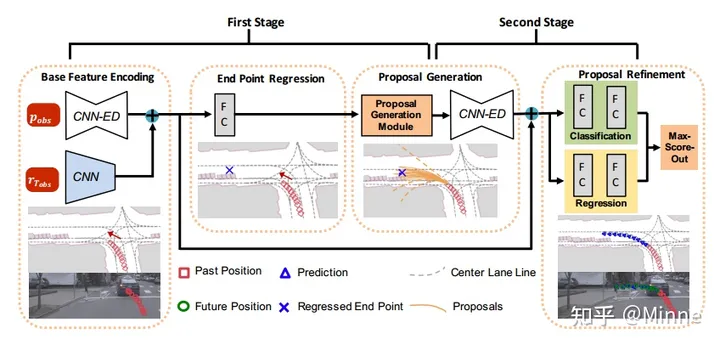
Fang L, Jiang Q, Shi J, et al. Tpnet: Trajectory proposal network for motion prediction[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 6797-6806.
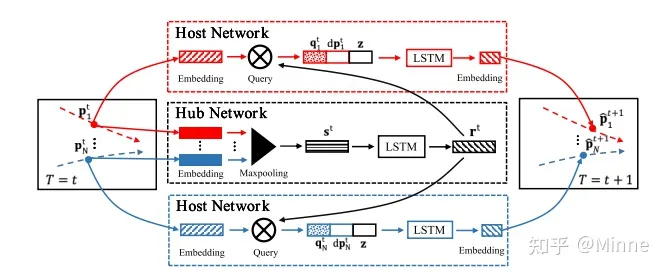
Zhu Y, Qian D, Ren D, et al. Starnet: Pedestrian trajectory prediction using deep neural network in star topology[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019: 8075-8080.
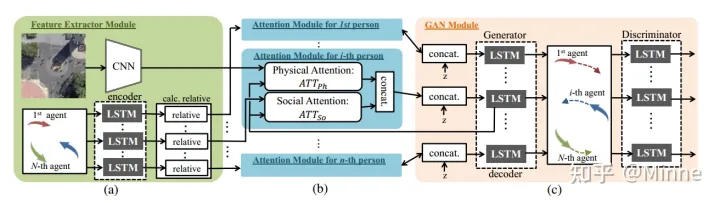
Sadeghian A, Kosaraju V, Sadeghian A, et al. Sophie: An attentive gan for predicting paths compliant to social and physical constraints[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019: 1349-1358.
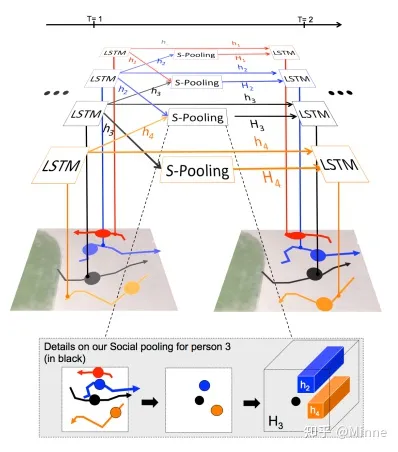
Alahi A, Goel K, Ramanathan V, et al. Social lstm: Human trajectory prediction in crowded spaces[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2016: 961-971.
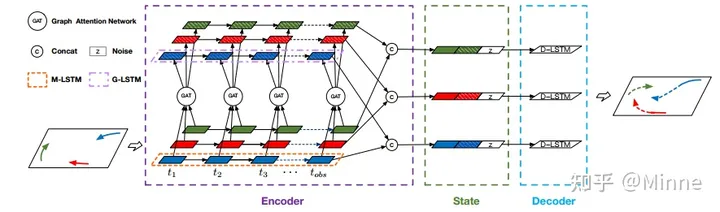
Huang Y, Bi H K, Li Z, et al. Stgat: Modeling spatial-temporal interactions for human trajectory prediction[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. 2019: 6272-6281.
Pan J, Sun H, Xu K, et al. Lane-Attention: Predicting Vehicles’ Moving Trajectories by Learning Their Attention Over Lanes[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020: 7949-7956.
Ivanovic B, Pavone M. The trajectron: Probabilistic multi-agent trajectory modeling with dynamic spatiotemporal graphs[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. 2019: 2375-2384.