阅读本文后,您应该能够回答以下关键问题:
什么是编码器,它如何提高逆变器和电机驱动系统的性能?
哪些编码器性能指标对特定系统最重要?阅读本文后,您将了解如何使编码器的分辨率、精度和可重复性规格与电机和机器人系统规格相匹配。
编码器常用的电子元件有哪些,未来的发展趋势是什么?阅读本文后,您将了解设备健康监测、边缘智能、稳定可靠的检测和高速连接如何支持未来的编码器设计。
在过去的几十年里,从传统的并网电机向逆变器驱动电机的过渡一直在稳步、持续地进行。这是工业旋转设备的重大转型,通过提高电机和终端设备的使用效率,不仅实现了工艺改进,还能节省大量能源。变速驱动器和伺服驱动系统提高了电机控制性能,从而可以改善要求严苛应用的质量和同步功能。如图1所示,功率级使用了功率逆变器、高性能位置检测以及电流/电压闭环反馈,因此电机性能和效率得以提高。
将变频电压施加于逆变器采用脉冲宽度调制的电机,可以实现对电机的开环速度控制。在稳态或缓慢变化的动态条件下,这将相当有效,并且较低性能应用中的许多电机驱动器采用开环速度控制,而不需要编码器。但是,这种方法有几个缺点:
由于没有反馈,速度精度很有限
由于无法优化电流控制,电机效率很低
必须严格限制瞬态响应,以免电机丧失同步
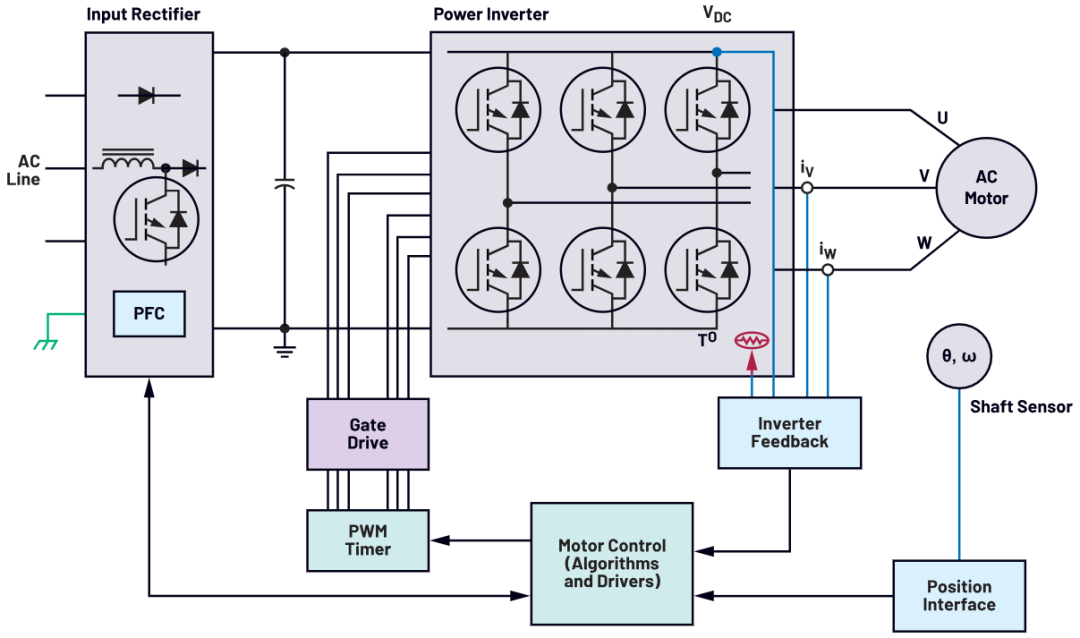
图1.闭环电机控制反馈系统
编码器通过跟踪旋转轴的速度和位置来提供闭环反馈信号。光学和磁编码器技术使用非常广泛,如图2所示。在通用伺服驱动器中,编码器用于测量轴位置,从中可推导出驱动器转速。机器人和离散控制系统需要准确且可重复的轴位置。光学编码器由带有精细光刻槽的玻璃圆盘组成。当光穿过圆盘或从圆盘反射时,光电二极管传感器检测光的变化。光电二极管的模拟输出经过放大和数字化处理后,通过有线电缆发送到逆变器控制器。磁编码器由安装在电机轴上的磁体和磁场传感器组成,传感器提供正弦和余弦模拟输出,输出经过放大和数字化处理。光学和磁传感器信号链类似,如图2所示。
单圈绝对值编码器在通电后会返回机械或电气360°范围内的绝对位置信号。电机轴的位置可以立即读取。多圈绝对值编码器不仅具有绝对位置功能,而且能提供360°圈数计数。相比之下,增量编码器提供相对于旋转起点的位置。增量编码器提供一个索引脉冲来指示0°,并提供一个单脉冲来计数圈数,或提供一个双脉冲来提供方向信息。
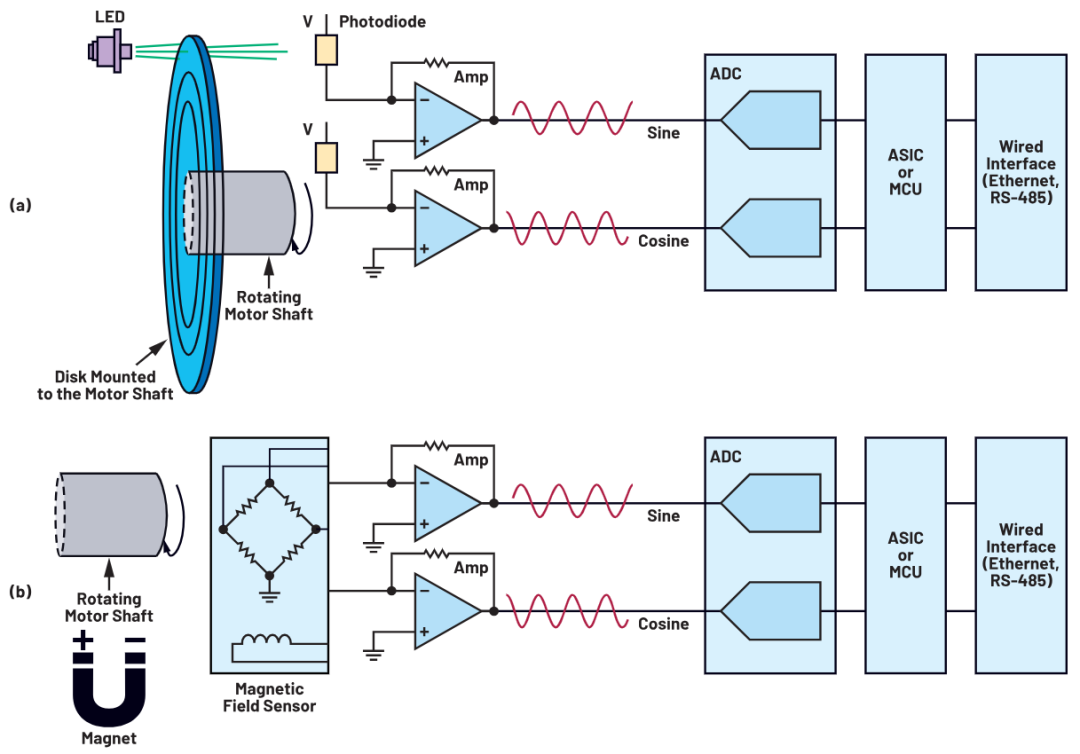
图2.(a) 光学编码器,(b) 磁编码器
编码器的分辨率是指电机轴旋转360°时可以区分的位置数量。通常,最高分辨率的编码器使用光学技术,而中高分辨率的编码器使用磁或光学传感器。中低分辨率编码器使用旋变器(旋转变压器)或霍尔传感器。光学或磁编码器使用高分辨率信号调理。大多数光学编码器是增量式的。编码器可重复性是一项关键性能指标,用于衡量编码器返回到同一指令位置的一致性。这对于重复性任务至关重要,例如在PCB制造过程中,放置半导体所用的机器人或贴片机须具有良好的可重复性。
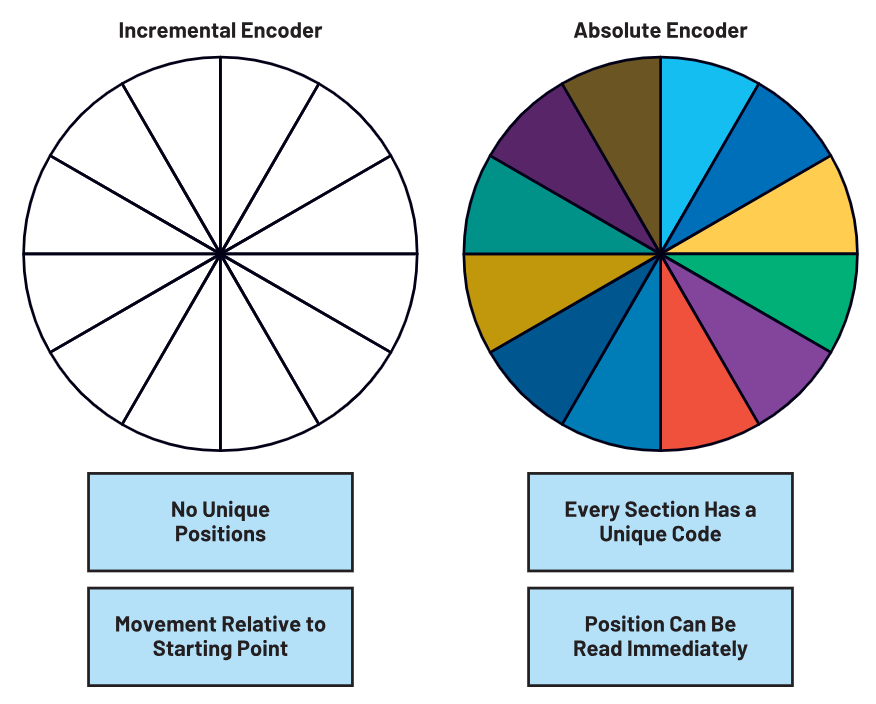
图3.编码器类型

表1.编码器关键性能指标
贴片机/机器人是食品包装和半导体制造行业中常用的自动化机器。为了提高工艺效率,需要具有高精度和可重复性的机器或机器人。使用高性能电机编码器可实现高精度、可重复性和高效率。
图4展示了机器人中的编码器应用案例。电机通过精密减速变速箱驱动机器臂中的每个关节。机器人关节角度通过电机上安装的精密轴角编码器(θm)和机器臂上安装的附加编码器(θj)来测量。
对于机器人,数据手册上列出的主要性能规格是可重复性,其数量级通常在亚毫米级。在了解可重复性规格和机器人的作用范围之后,就可以推断旋转编码器的规格。
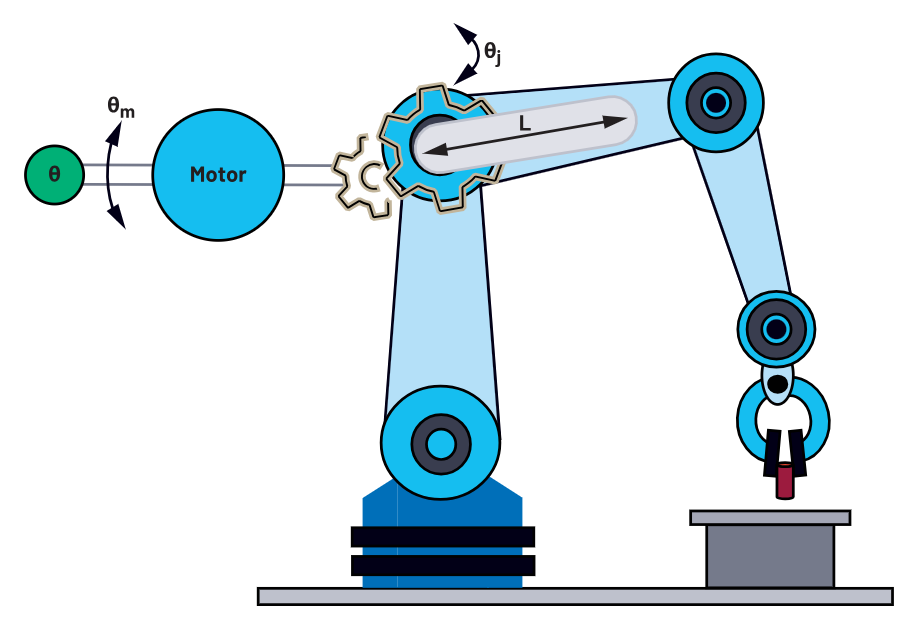
图4.电机编码器(θm)和关节编码器(θj)的角度可重复性,以及机器人作用范围(L)
关节编码器所需的角度可重复性(θ)可从三角函数得出:机器人可重复性除以作用范围的反正切。

多个关节结合起来可实现机器人的整体作用范围。传感器应具有比目标角度精度更高的性能。必须改善每个关节的可重复性规格,这里假设改进10倍。对于电机编码器,可重复性由齿轮比(G)定义。
例如,对于表2所示的机器人系统,关节编码器需要20位到22位的可重复性规格,而电机编码器需要14位到16位的分辨率。
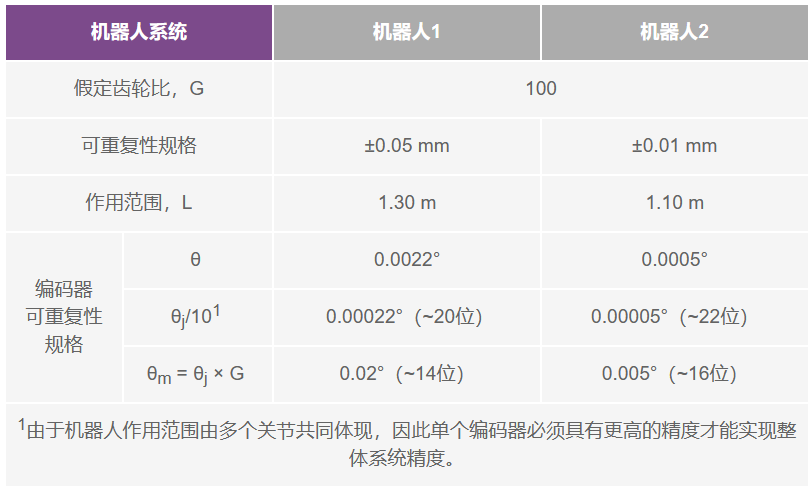
表2.编码器可重复性和机器人可重复性规格
图5说明了编码器的未来发展趋势和实现这些趋势的技术。
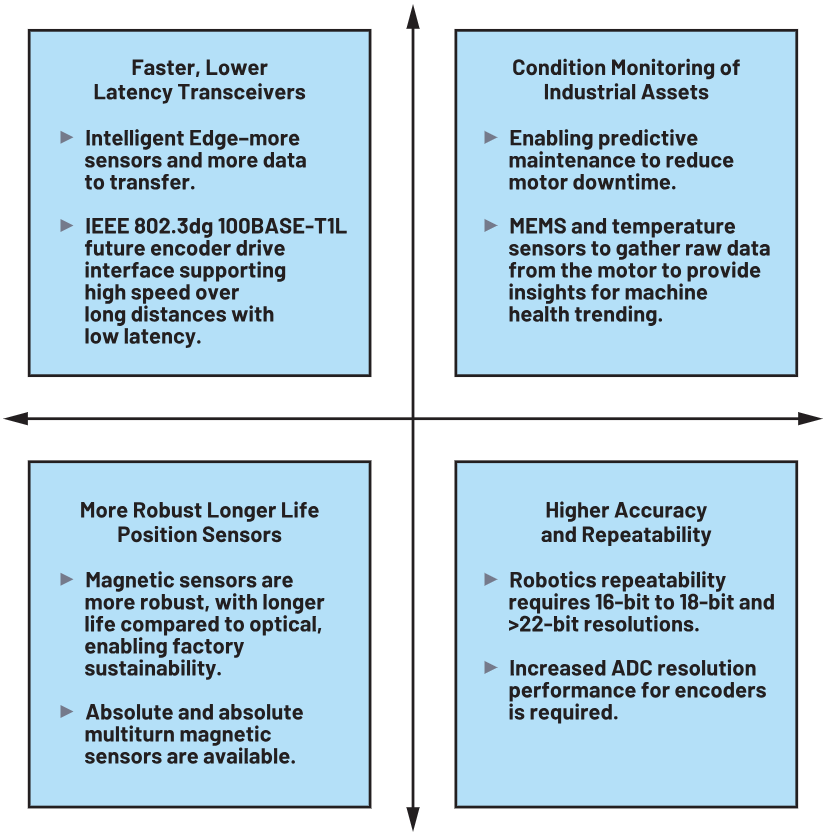
图5.编码器发展趋势和实现这些趋势的技术
Rockwell关于伺服驱动器、编码器和编码器通信端口的研究表明,用于反馈通信的收发器每年增长20%。支持通过两条线(IEEE 802.3dg标准100BASE-T1L)进行100 Mbps通信的单对以太网(SPE)收发器目前正在研究中,未来的编码器驱动接口将受益于低延迟,目标性能为≤1.5 µs。这种低延迟将支持更快的反馈数据采集和更短的控制环路响应时间。
对机器人和旋转机器(例如涡轮机、风扇、泵和电机)实施的状态监控会记录与机器的健康和性能相关的实时数据,以便针对性地实施预测维护和优化控制。在机器生命周期的早期进行针对性的预测维护,可以减少生产停机的风险,从而提高可靠性、显著节约成本和提高工厂的生产率。将MEMS加速度计放置在编码器中可提供机器的振动反馈,这适合质量控制至关重要的应用。将MEMS加速度计添加到编码器中会很方便,因为编码器具有现成的布线、通信和电源,可以向控制器提供振动反馈。在数控(CNC)机床等一些应用中,从编码器发送到伺服器的MEMS振动数据可用于实时优化系统性能。
使用CbM并结合稳健且寿命更长的位置传感器,可以延长工业资产的使用寿命。磁传感器产生指示周围磁场角位置的模拟输出,可以代替光学编码器。磁编码器可用于湿度较高、污垢严重和灰尘较大的区域。这些恶劣的环境会影响光学解决方案的性能和使用寿命。
对于机器人和其他应用,必须始终清楚机械系统的位置,哪怕在断电的情况下也要明确知晓。标准机器人、协作机器人和其他自动化装配设备在运行过程中突然断电后,需要重新归位并初始化电源,这些停机时间会带来一定的相关成本并导致效率低下。由ADI公司开发的磁性多圈存储器不需要外部电源也能记录外部磁场的旋转次数,因而可以减小系统尺寸并降低成本。
对于机器人和协作机器人,电机编码器和关节编码器通常需要16位至18位ADC性能,在某些情况下需要22位ADC。有些光学绝对位置编码器也需要高达24位分辨率的高性能ADC。
图6、图7、图8和图9展示了磁性(各向异性磁阻(AMR)和霍尔技术)、光学和旋变编码器的编码器信号链。主要元件分为五大类:
1. 使用磁传感器(AMR、霍尔)跟踪轴位置和速度
2. 设备健康状况监测
a. MEMS传感器
b. 温度传感器
3. 智能
a. 带/不带集成ADC的微控制器
b. 旋变数字转换器(RDC)
4. 电缆接口
a. 高速RS-485/RS-422收发器
b. SPI转RS-485扩展器收发器
5. 信号调理
a. 高性能ADC(12位至24位分辨率)
检测
在磁位置传感器应用领域,AMR传感器兼具稳定可靠的性能和高精度。如图6所示,传感器通常位于安装在电机轴上的偶极磁体对面。
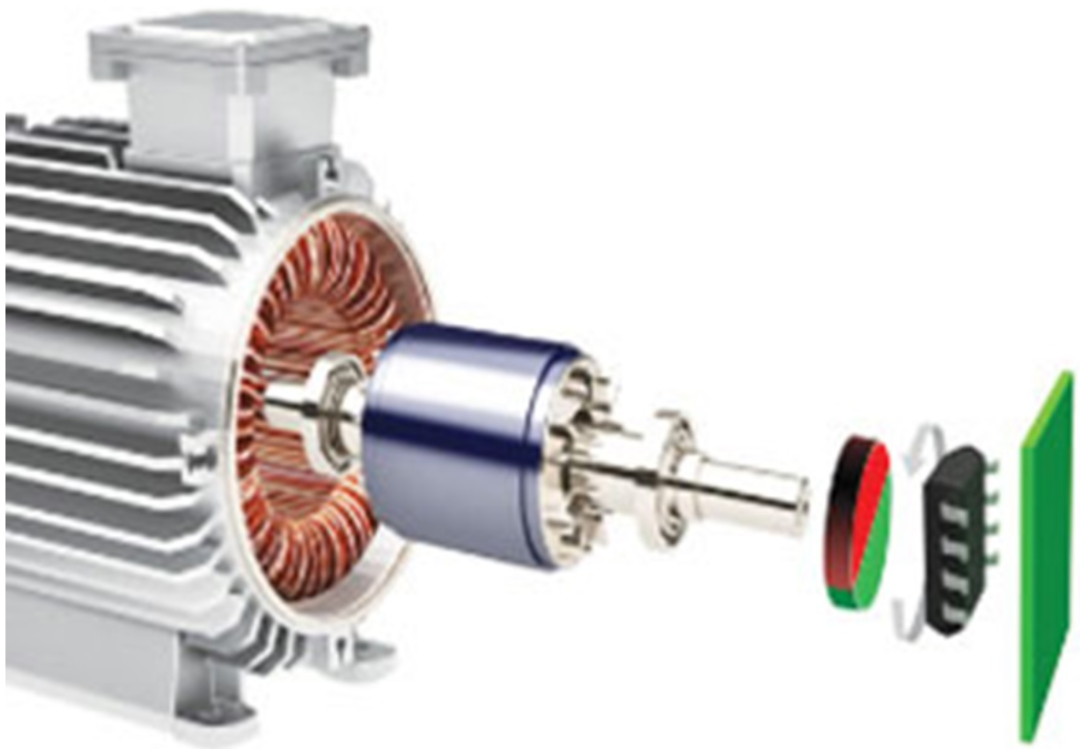
图6.AMR传感器系统
AMR传感器对磁场方向变化很敏感,而霍尔技术对磁场强度很敏感。所以传感器对系统中的气隙和机械公差变化具有很强的容忍度,这一点很有优势。此外,AMR传感器的工作磁场没有上限,因此,这种传感器在高磁场下工作时几乎不受杂散磁场的影响。
ADA4571 是一款低延迟集成信号调理功能的AMR传感器,提供单端模拟输出。ADA4571单芯片解决方案提供良好的角度精度(典型角度误差仅为0.10度),工作速度可高达50k rpm。ADA4571-2是双通道版本,可提供完全冗余能力而不影响性能,适合安全关键型应用。
ADA4570 是AAD4571的衍生产品,具有相同的性能,但提供差分输出,适用于更恶劣的环境。ADA457x系列提供的高角度精度和可重复性改善了闭环控制,降低了电机扭矩纹波和噪声。与竞争技术相比,单芯片架构提高了可靠性,减小了尺寸和重量,并且更易于集成。
信号调理和电源
AD7380 4 MSPS双通道同步采样、16位SAR ADC具有许多系统级优势,包括节省空间的3 mm × 3 mm封装,这对于空间受限的编码器PCB板非常重要。4 MSPS吞吐速率确保捕捉到正弦和余弦周期的详细信息,以及最新的编码器位置信息。高吞吐速率支持实施片内过采样,从而缩短数字ASIC或微控制器将准确的编码器位置反馈给电机时的时间延迟。AD7380片内过采样还有一个好处,它可以额外增加2位分辨率,从而与片内分辨率增强功能轻松配合使用。应用笔记AN-2003详细介绍了AD7380的过采样和分辨率增强功能。该ADC的VCC和VDRIVE以及放大器驱动器的电源轨可以由LDO稳压器(例如LT3023)供电。ADP320、LT3023和 LT3029 等多路输出低噪声LDO可用来为信号链中的所有元件供电。
收发器
ADM3066E RS-485收发器具备超低的发送器和接收器偏斜性能,所以非常适合用于传输精密时钟,EnDat 2.2 等电机控制标准通常要求精密时钟。事实证明,ADM3065E在电机控制应用中采用典型电缆长度的确定性抖动小于5%。ADM3065E具有较宽的电源电压范围,因此这种时序性能水平也可用于需要3.3 V或5 V收发器电源的应用。有关更多信息,请参阅技术文章" 利用现场总线提升速度,扩大覆盖范围 "。
微控制器
对于需要12位或更低分辨率的应用,可以用集成ADC的微控制器来代替AD7380 ADC。小巧的 MAX32672 超低功耗Arm® Cortex®-M4F微控制器包含一个12位1 MSPS ADC,具有增强的安全性、外设和电源管理接口。
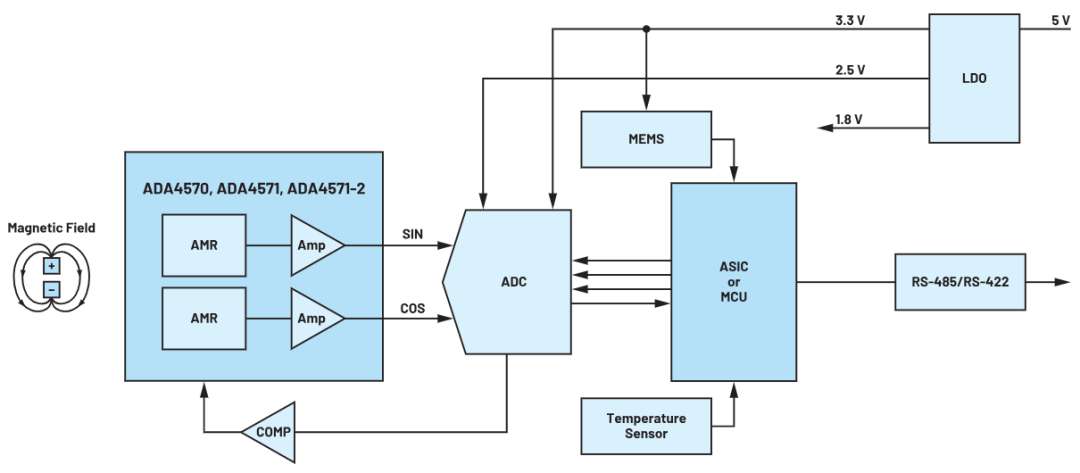
图7.磁编码器(AMR)信号链
资产状况监控
ADXL371 是一款超低功耗、3轴、数字输出、±200g微机电系统(MEMS)加速度计,适用于机器监控。ADXL371性价比高,采用小型3 mm × 3 mm封装,工作温度高达+105°C。在即时导通模式下,ADXL371消耗1.7 μA的电流,同时能持续监测环境影响。当检测到冲击事件超过内部设定的阈值时,器件会切换到正常工作模式,其速度非常快以便记录事件。
ADT7320 是一款高精度数字温度传感器,无需用户校准或校正,具有出色的长期稳定性和可靠性。ADT7320的额定工作温度范围为-40°C至+150°C,采用小型4 mm × 4 mm LFCSP封装。
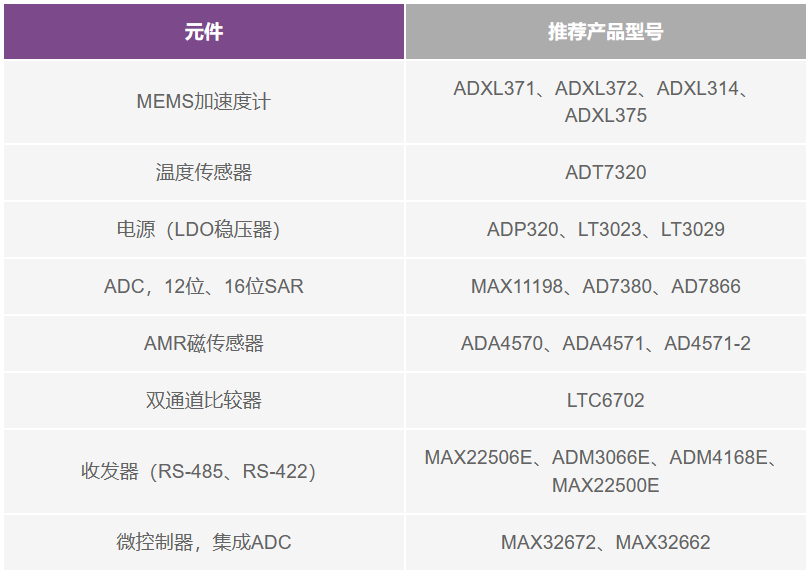
表3.磁编码器(AMR)信号链推荐元件
磁编码器(霍尔)
可以使用AD22151或 AD22151G 设计霍尔编码器。AD22151G是一款线性磁场传感器,其输出电压与垂直施加于封装上表面的磁场成比例。为了设计编码器系统,将等间距的磁体放置在旋转电机轴上。当旋转轴磁体经过霍尔传感器时,传感器输出的电压达到峰值。使用更多磁体或传感器可以获得更高的分辨率。霍尔效应编码器可以使用MAX32672和ADM3066E以支持有线接口。ADXL371 MEMS和ADT7320可为恶劣的编码器环境提供状态监控。磁编码器(AMR)部分提供了有关这些信号链元件的更多信息。

表4.磁编码器(霍尔)信号链推荐元件
光学编码器
光学编码器信号链元件与磁编码器(AMR)部分介绍的元件几乎相同。但是,为了支持更高的编码器分辨率,建议使用 AD7760 2.5 MSPS、24位、100 dB Σ-Δ ADC。它融合了宽输入带宽、高速特性和Σ-Δ转换技术的优势,2.5 MSPS时信噪比(SNR)可达100 dB,因此非常适合高速数据采集应用。
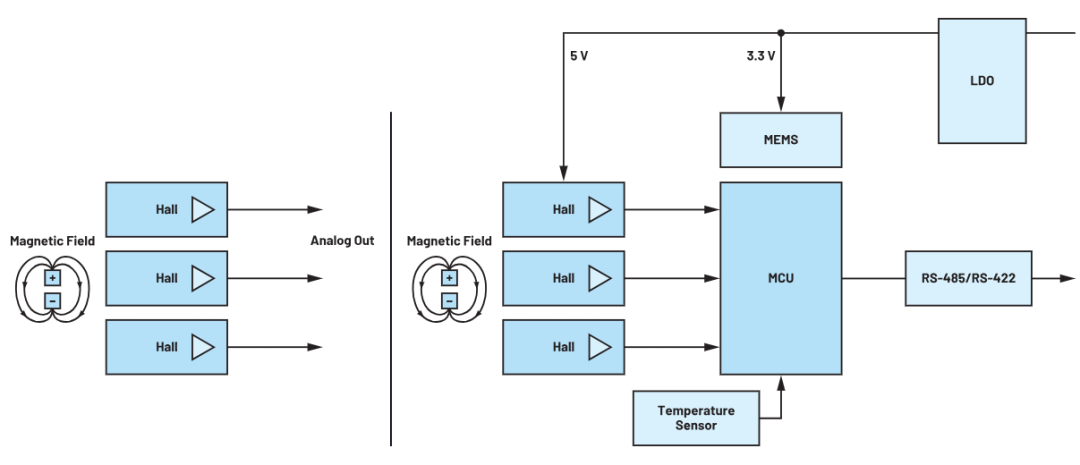
图8.磁编码器(霍尔)信号链
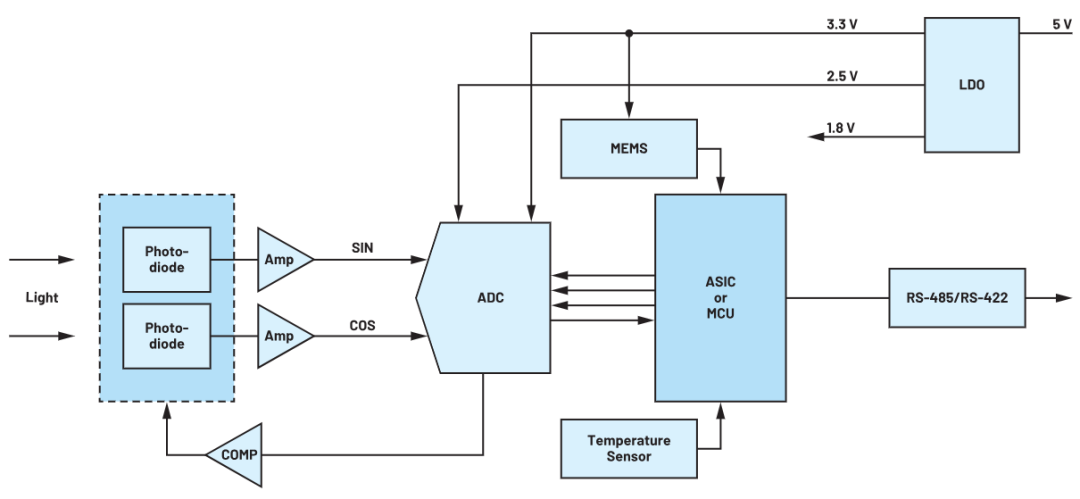
图9.光学编码器信号链
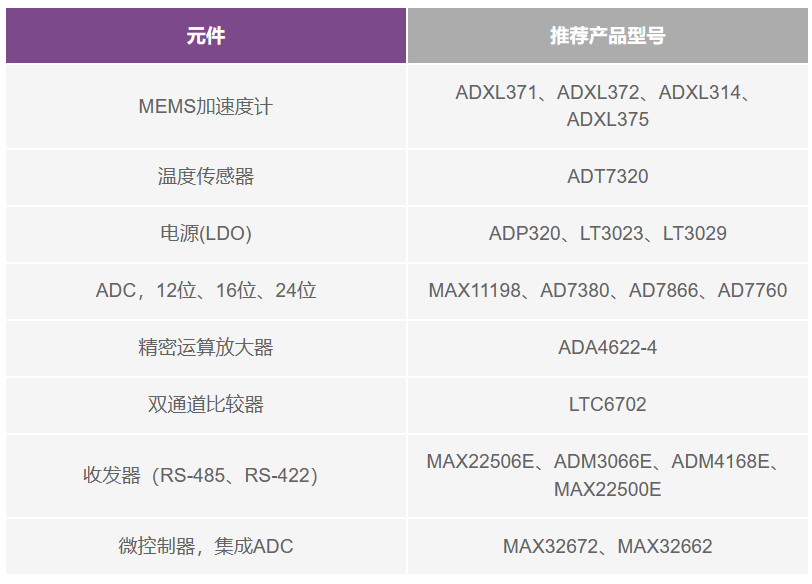
表5.光学编码器信号链推荐元件
旋变(耦合)编码器
旋变编码器具有一些优点,例如较高的机械可靠性和高精度;但与磁体和ADA4571相比,旋变器价格昂贵。
AD2S1200 将来自旋变器的信号转换为数字角度或角速率。图10显示了旋变器信号链。两个放大器用于创建三阶巴特沃斯低通滤波器,以将旋变器信号传递到AD2S1200。有关更多信息,请参阅电路笔记CN0276。
为节省空间并降低设计复杂性,建议使用 LTC4332 SPI扩展器。LTC4332支持系统分区,提供了将微控制器置于伺服器中而非编码器中的选项。如果编码器需要微控制器,可以使用MAX32672 SPI接口直接连接AD2S1200,并且可以用ADM3065E RS-485收发器代替LTC4332。
如果使用LTC4332,AD2S1200 SPI输出会转换为稳健的差分现场总线接口。LTC4332包括三条从机选择线,因此MEMS和温度传感器等额外传感器可以与AD2S1200连接到同一条总线上。

表6.旋变编码器信号链推荐元件
ADI公司利用其深厚的领域专业知识和先进技术,帮助合作伙伴设计未来工业电机编码器和网络。利用小巧而强大的微控制器、ADXL371 MEMS加速度计和ADT7320温度传感器,可以轻松地将资产健康洞察能力集成到编码器中。与光学或旋变器检测解决方案相比,ADI公司先进的AMR磁传感器(例如ADA4571)提高了可靠性,减小了尺寸和重量,并且更易于集成到编码器中。采用AD7380或AD7760等中高端ADC可实现贴片机和机器人所需的高精度和可重复性。
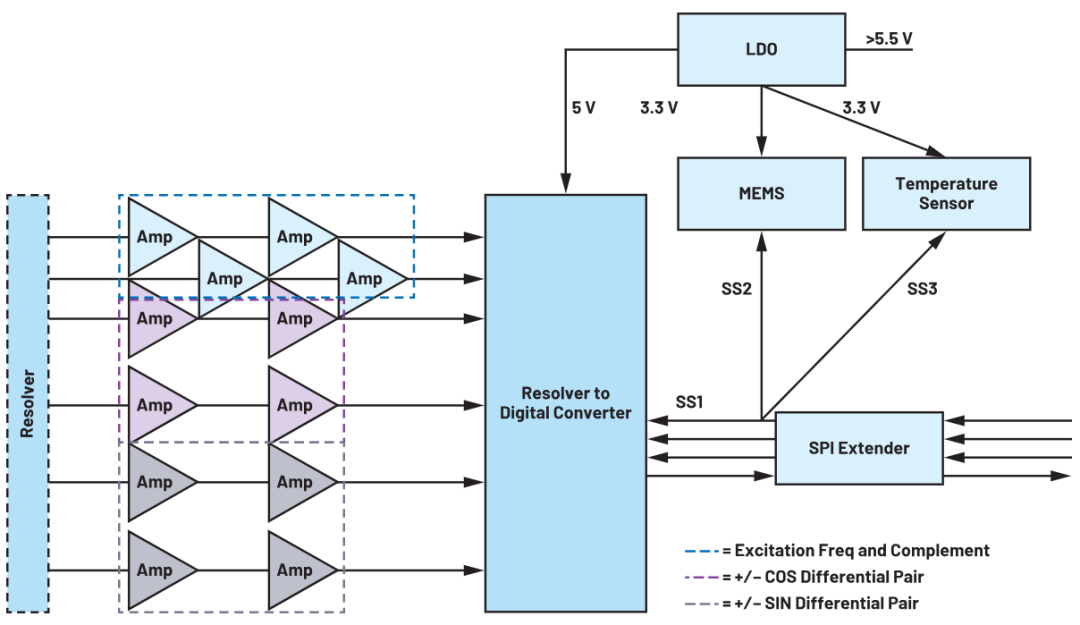
图10.旋变编码器信号链