


前面我们学习了 Python语言, 开发无线电轨智能车模使用的是 MicroPython 语言,如何从 Python 语言编程, 转向 MicroPython 语言编程,下面让我们来谈谈以下三个问题: (1)他们之间的区别;(2) MicroPython中特殊的硬件开发软件包;(3)在 MicroPython 开发单片机中嵌入式程序的三个需要注意到的特点,Setup-Loop 整体框架结构;硬件相关软件结构;硬件中断的使用。下面让我们逐一讨论一下。

MicroPython 语言是集成了 Python 语言的一个分支, 实现了 Python 3.4 版本语言标准。它是专门为在单片机这类嵌入式微控制器上, 实现的一款简洁稳定的Python语言解释器由于它属于高级解释型语言, 使得单片机的开发变得容易起来现在已经有众多的单片机平台都支持 MicroPython 进行应用软件的开发。对于初学者来讲, 在语法层面, MicroPython 与 Python 语言的差别基本上不易被觉察。 这里就不做展开, 大家如果感兴趣,可以在 MicroPython 官网进行查看。 最后需要说明一点的是, 为了便于软件开发, 在MicroPython中有一种交互式程序开发模式, REPL, 也就是 Read Evaluate Print Loop。MicroPython 在此模式下, 不断读取从串口输入的 MicroPython 指令, 执行后, 进行结果输出。这个过程不断循环, 形成一个交互式开发模式。

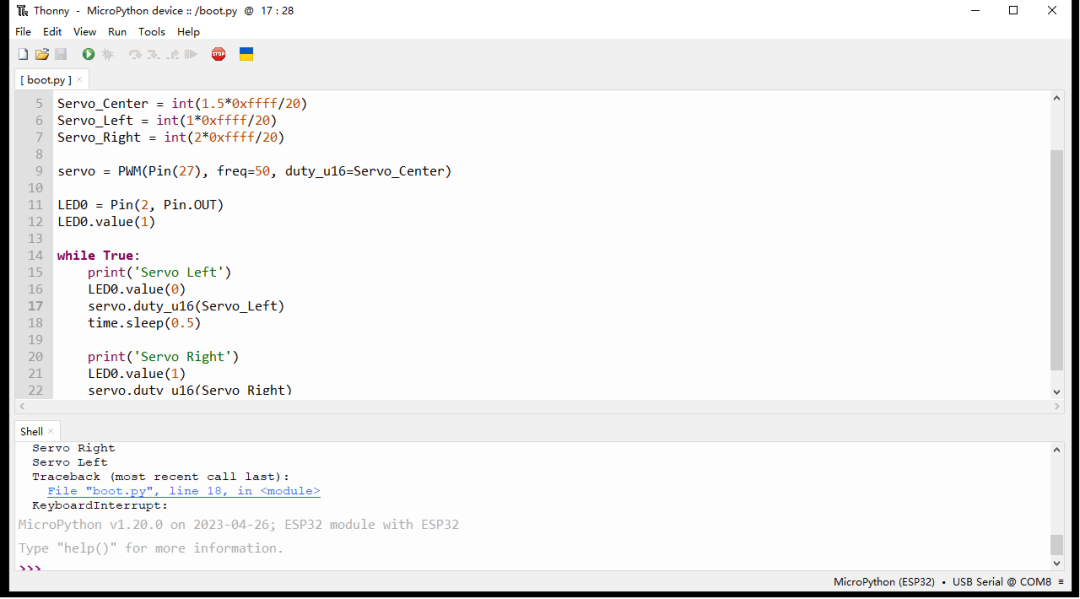
比如在Thonny 环境中,利用上面程序编辑窗口进行软件开发属于正常程序开发,在Shell中就可以使用 REPL 机制进行交互式开发,比如下面演示在 Shell 中 命令提示符后面输入不同命令, 回车后, MicroPython 执行结果的演示。手工输入, 或者拷贝前面的命令, 都可以进行执行。
为了应用到单片机平台中的硬件模块,在 MicroPython 中还集成了很多特殊的软件包。应用这些软件包可以定义一些与硬件相关的对象, 以及相关的硬件函数接口。
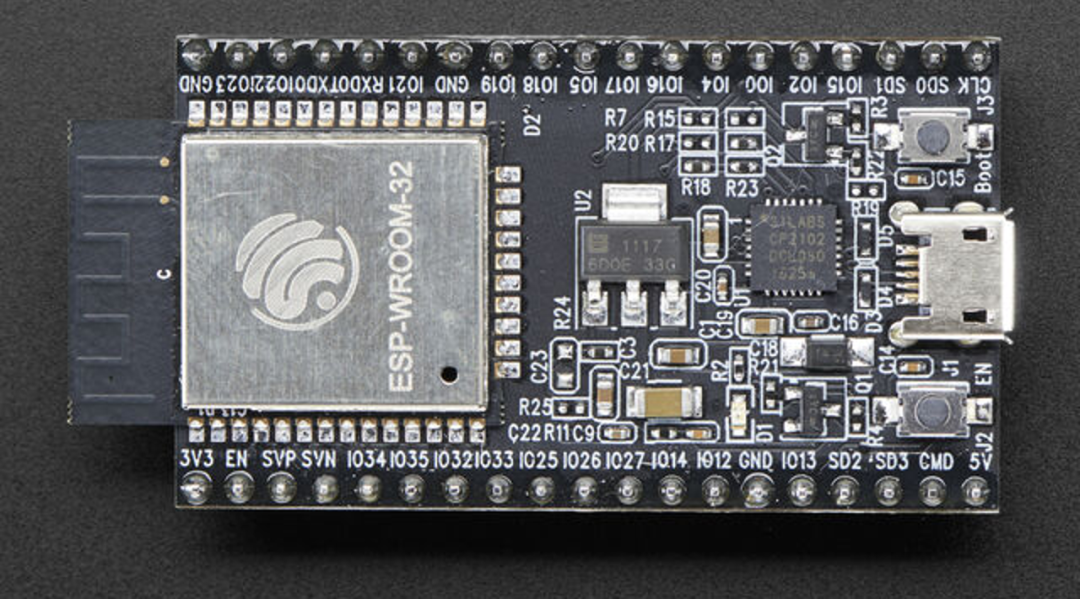
这里以无线电轨智能车重核心控制板 ESP32为例, 在它的MicroPython 中就集成了很多的硬件软件包包括有管脚、异步串口、PWM、ADC 以及外部的 I2C, SPI 串行接口等。通过这些特殊的硬件驱动软件包, 我们就可以在Python 语言中访问利用这些硬件资源, 来控制车模的运行, 感知外部环境等。比如这里是 I2C总线软件包, 通过它可以连接单片机外部很多资源,为了应用这个端口,可以 import machine 软件包中的 Pin, I2C 模块,通过定义相应的对象, 设置 I2C 总线端口的属性,并与外部设备通信。
通过实验 掌握更多单片机的这些硬件资源的特点和使用方法是应用单片机解决车模控制问题的管脚所在。
最后, 我们讨论一下 MicroPython 开发嵌入式程序的特点。对于初学者需要注意三个方面的内容。第一个就是程序主题大体上呈现设置与循环两部分。在设置部分,往往需要 import 所需要的软件包、 对程序软件变量和硬件模块进行初始化等然后程序进入一个由 for 或者 while 语句构成的无限循环结构, 在这个结构中周期的执行一系列的指令, 完成控制的主要任务。第二部分就是需要理解程序中包含有一些与硬件相关的变量、对象等。它们需要不停的进行循环刷新和幅值,这些实时变量的值反映了单片机外部端口的电压信号, 或者通讯数据等, 通过前面的循环结构进行周期的读取或者赋值。 最终形成对外部电路的控制。

最后讲一下在车模控制中会碰到的另外一个特殊编程技术, 那就是中断。中断是在 单片机内部硬件在满足某些条件下执行的程序片段, 比如当定时器硬件出现溢出是会产生周期的定时器中断; 在外部端口出现电压变化时会出现 IO 信号中断;在串口接收到数据的时候会出现串口通讯中断等。灵活的应用中断是单片机嵌入式开发的重要技巧。 通常情况下, 前面的 Loop 循环 以及中断程序, 在嵌入式软件开发中往往被称为嵌入式程序的 后台 任务和 前台 任务。

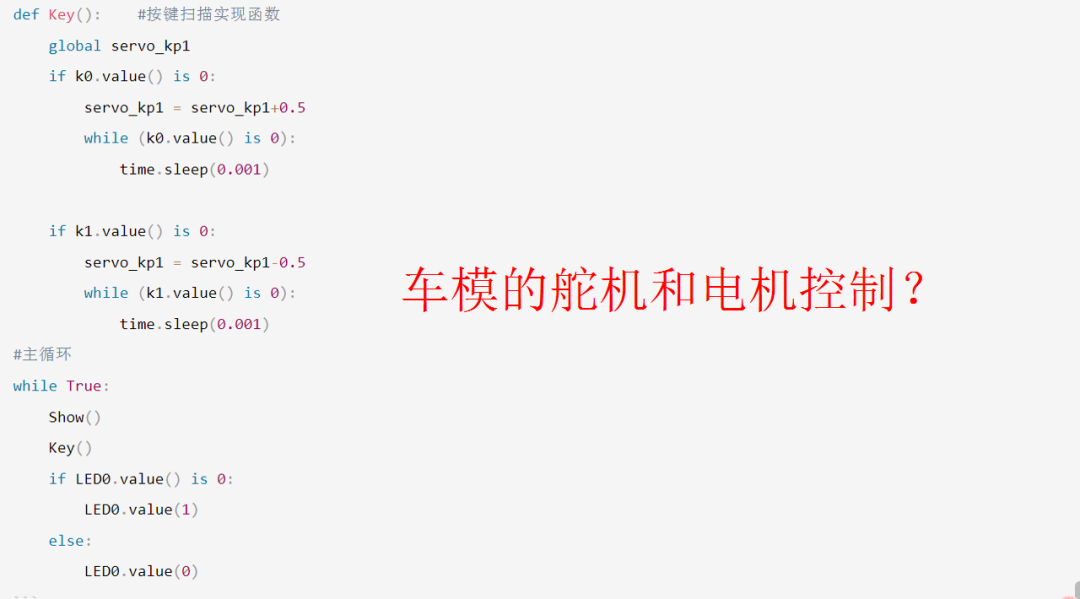
这里以无线电轨智能车综合测试程序为例, 来说明一下 MicroPython 程序的特点。对于初学者来看, 这个程序显得有点复杂,但在整体上, 大家看到, 它分为前后两部分。 前面部分属于 Setup 初始化部分, 做了很多的硬件初始化, 也定义了一些函数。后面一部分,就是有 while 形成的 循环控制部分, 这些属于软件的后台任务部分。在每一次循环中依次执行 OLED 屏幕的刷新,按键的检测处理,以及控制板上 LED 的闪烁, 用于显示程序运行状态。此时估计大家会有一个疑问, 车模运动中舵机和电机控制代码在哪里执行呢?
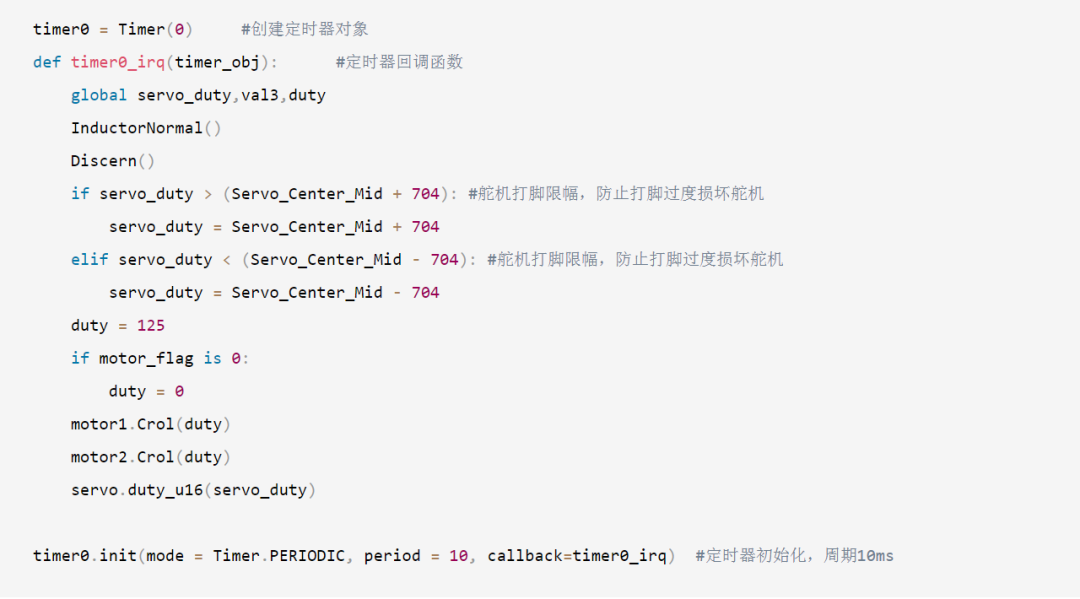
为了解决这个疑问, 大家看这个综合演示程序的中间部分,在这里定义了 ESP32 硬件定时器对象, timer0,接下来定义了一个函数, 用于定时器中断函数后面是对定时器进行初始化,设置定时器工作模式为周期中断模式,中断周期为 10毫秒, 也就是100Hz 的重复频率,第三个参数设置中断服务程序。这个程序就是前面定义的 timer0 irq 函数。因此这个中断程序就会在 Timer0 的中断驱动下, 每隔精确的 10毫秒, 就被执行一次。 中断程序属于嵌入式软件的前台任务。 中断程序定义了中断任务这些是需要用到的全局变量, 和程序中其它函数进行信息传递。读取电磁场传感器的交流电压值判断赛道的属性计算舵机偏移量对舵机偏移量进行限幅下面就是设置电机运行速度和舵机偏移量。中间部分是用于控制电机是否运行的逻辑。之所以利用中断周期进行车模控制, 主要是为了保证控制时间的精确和周期的稳定。 这要比在 while 循环中执行控制命令更加可靠。
大家感兴趣还可以研究一下这个程序前面的初始化过程,对于一些和硬件相关的模块的使用,可以配合后面相关的实验介绍进行联系。通过这个程序, 大家能够熟悉 MicroPython 编写嵌入式软件的一些特点。

本文给出了 MicroPython中 需要注意的编程事项, 结合后面无线电轨车模编程实验, 大家逐步理解嵌入式软件编程的特点, 这些特点也同样是用于 C 语言, 汇编语言开发嵌入式系统。为后面智能车模软件开发打下基础。

Introduction to MicroPython – Python for Microcontrollers: https://www.seeedstudio.com/blog/2020/03/30/introduction-to-micropython-python-for-microcontrollers/#:~:text=Basically%2C%20Micropython%20is%20a%20lean%20and%20efficient%20implementation,of%20using%20other%20more%20complicated%20languages%20like%20C%2B%2B.
[2]清华云盘资料下载: https://cloud.tsinghua.edu.cn/d/7471180bdb0f4d1ebbc7/
[3]无线电轨智能车校内赛 | 如何学习无线电轨车模?: https://zhuoqing.blog.csdn.net/article/details/131876635
[4]基础Python学习网站 Learn Python: https://www.learnpython.org/
