



光场相机通过在主透镜与传感器元件间放置一块紧密排布的微透镜阵列,仅需单次曝光即可获得光线的空间、角度四维信息,经过后期算法处理可以得到场景处于不同视角和不同景深的图像以及深度信息,具有结构紧凑,体积小,采集效率高等优点。据笔者了解,目前在工业级光场相机制造供应上,主要有德国的Raytrix公司以及国内的VOMMA奕目(上海)科技有限公司。
Raytrix 成立于2008年,自2010年起销售用于专业应用和研究的3D光场相机。Raytrix专注于为工业应用开发光场相机,获得专利的微透镜阵列设计能够在高效分辨率和大景深之间实现最佳折中(trade-off)。Raytrix推出的光场相机已经在计算机摄影、PIV三维测速、工件视觉检测、三维立体显示、人脸辨识以及交通监控等领域均取得了较好的应用。
奕目(上海)科技有限公司则成立于2019年,为上海交通大学科技成果转化企业,计算成像领域的"专精特新"高新技术企业。核心产品光场相机结合计算成像技术,实现对多维度光线信息的瞬时记录,拥有单次拍摄、瞬时三维建模的能力,具有微纳级精度、毫秒级计算、被动式测量的特点。至今VOMMA推出了多台工业级光场相机,在屏幕缺陷分层检测以及芯片金线三维检测、虚拟像面等落地应用上都取得了较好的检测效果。
虽然Raytrix和VOMMA的核心产品——光场相机都是基于微透镜阵列对光场进行采集,但两者在成像原理上存在本质的差别。
如图1所示,Raytrix推出的光场相机为聚焦型光场相机,微透镜阵列(MLA)并不是放置在主透镜像侧焦平面位置,因此微透镜阵列实际上是对主透镜所成的像进行二次成像。根据聚焦型光场相机的成像原理,微透镜阵列的位置可以进行调整,因此对于Raytrix光场相机系统,微透镜阵列与传感器元件的间距为毫米尺度,封装要求较低,微透镜阵列易于封装。
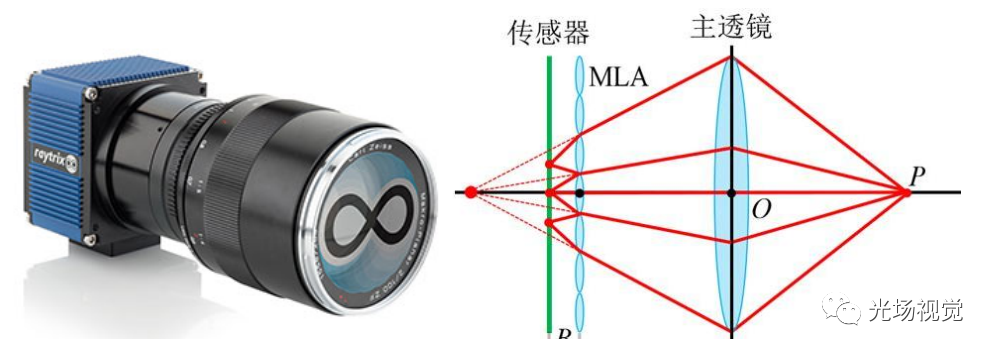
图1 Raytrix光场相机及成像原理
如图2所示,VOMMA推出的光场相机大多为散焦型光场相机,微透镜阵列放置在主透镜像侧焦平面位置,因此微透镜阵列对主透镜所成的像直接成像。对于散焦型光场相机系统,微透镜阵列与传感器元件的间距为一个微透镜焦距,为微米尺度,封装要求极高。VOMMA采用高精度芯片级封装工艺,自主研发的光场封装机台可将封装误差控制在±1um,从而得到精度更高的深度计算结果。
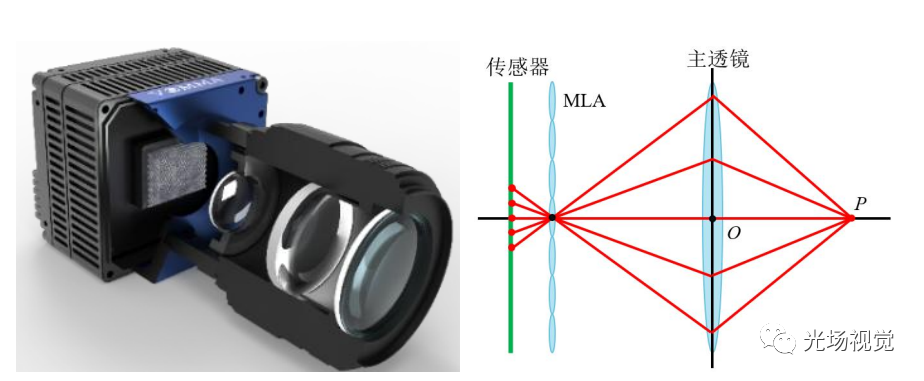
图2 VOMMA光场相机及成像原理
光场相机应用案例
3.1 3D金线检测
随着半导体技术的快速发展,电子产品的封装集成度越来越高、实现功能越来越多,市场对高质量芯片的需求也相应增长。芯片生产制造过程中,各工艺流程环环相扣且技术复杂,导致芯片容易产生缺陷而被强制报废,因此芯片金线的缺陷检测至关重要。
芯片制造过程中产生的表面缺陷示例如图3所示,主要为金线产生多线、并线、塌线、断线、线高等缺陷。

图3芯片表面缺陷
芯片金线体积很小,且表面金属反光明显,目前对于芯片金线的检测基本采用人工检测的方式。人工在高倍显微镜下进行检测,效益低且检测精度不高,易出现疲劳导致生产效率低,无法满足芯片批量生产的检测需求。另外,单一工位检测容易出现漏判情况,从而无法实现全方位检测的目的。视觉测量技术的逐渐发展使得金线缺陷检测方式拥有了更多的可能性。图4和图5分别展示了Raytrix和VOMMA、对金线的3D检测应用案例效果。
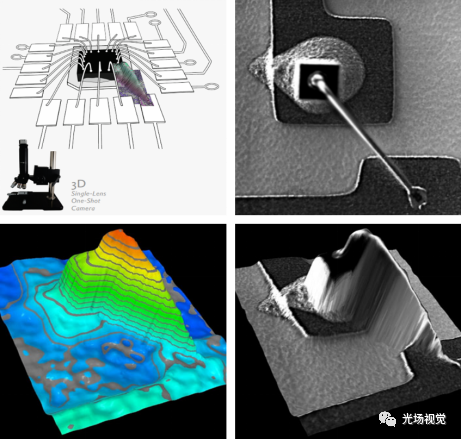
图4 Raytrix芯片金线3D检测应用
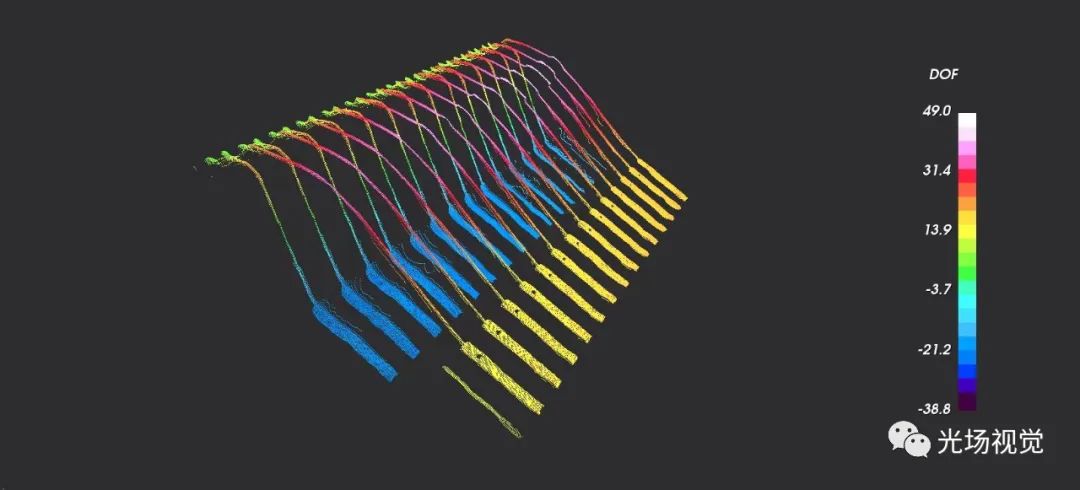
图5 VOMMA 芯片金线3D检测应用
除了对芯片金线的三维形貌测量之外,为了提高检测效率,奕目科技还开发了成熟的AI视觉检测算法平台。该算法平台基于光场相机三维成像过程中得到的2D和3D结果,能够自动识别、定位芯片、金球和金线,从而完成对多种缺陷的识别与检测。图6展示了视觉检测算法平台自动完成了单个芯片的金球、金线识别,并且输出是否断线以及线高的测量数值。

图6 VOMMA开发的金线缺陷检测算法平台
3.2 人脸建模
3D人脸建模,在游戏、影视特效、VR等领域应用广泛,但是由于人脸的复杂性、易变性,如何建立逼真的3D 人脸模型成为了一道难题。软件建模是最常见的人脸建模方式,利用3Dmax、Maya和Blender等3D建模软件可以对人脸进行手工建模,但是该方式耗时耗力且对电脑显卡要求较高,很容易出现电脑系统延迟甚至崩掉的情况。
相比之下,仪器采集的建模方式要轻松的多,通过3D测量设备,对人脸进行多次、多角度的数据采集就能够获得人脸的三维信息。由于人类无法做到长时间保持动作一致,因此对采集仪器的效率和测量精度有着较高的要求。具有高采集率和高测量精度的光场相机不失为一种好选择。
图7和8分别展示了Raytrix和VOMMA人脸建模应用案例结果。在面部还原效果以及细节上,VOMMA丝毫不逊色于发展多年的Raytrix。

图7 Raytrix人脸建模应用案例
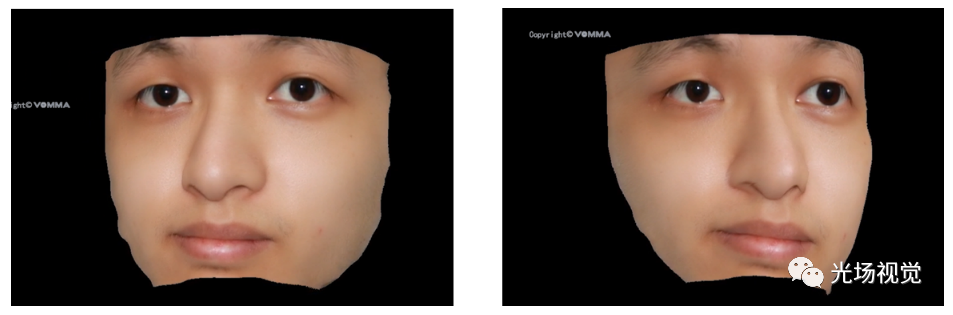
图8 VOMMA人脸建模应用案例
3.3 手机屏幕分层检测
现在的手机屏幕主要以触摸屏为主,组成部分有盖板玻璃、触控模组和显示模组。其中,显示模组通常分为LCD和OLED,其结构如图9所示。
LCD屏幕显示模组由偏光片、彩色滤光片、TFT、液晶、背板等构成,图像显色度好、画面柔和不伤眼。OLED屏幕显示模组由偏光片、有机发光层、玻璃、TFT等材料构成,屏幕可自发光,具有轻薄、可弯曲、低耗能的优点。

图9 LCD和OLED屏幕结构组成
手机屏幕在生产过程中可能出现亮点、划痕、崩边或附着异物等多种缺陷,并且这些缺陷可能会以分层的形式出现,导致其百分百强制报废。因此对手机屏幕检测相当有必要。VOMMA提供的手机屏幕缺陷3D检测方案(见图10和图11)可通过单次拍摄(<100ms)获得三维信息,通过成熟的AI视觉检测算法平台,能自动识别、定位点状灰尘、亮点、暗点,并完成检测、测量和分层判断。
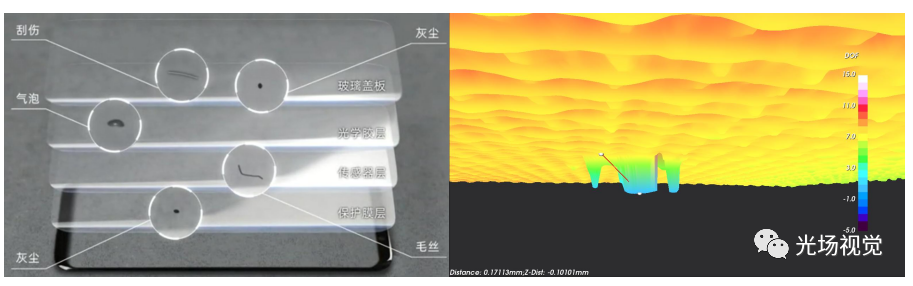
图10 VOMMA屏幕缺陷3D检测方案成像效果展示
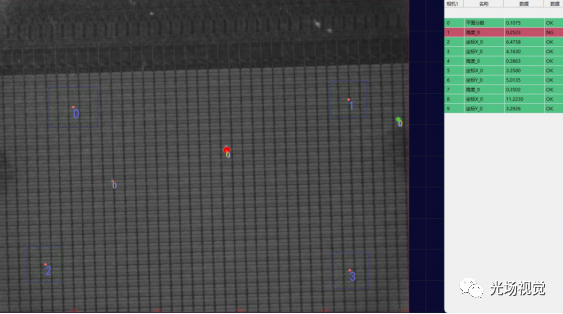
图11 VOMMA开发的手机屏幕缺陷检测算法平台
3.4 虚拟像面三维检测
VR眼镜之所以能给人以沉浸式体验,主要归功于:(1)大FOV使人视线范围内都沉浸于VR图像中;(2)单目成像的分辨率高、畸变小等;(3)双目图像的合像特性好,左右图像一致性高、融合程度好。其中,合像特性尤为重要,它影响着虚拟物体显示的立体感,融合程度差会让使用者产生视觉疲劳(大脑会尝试将左右眼得到的图像经过旋转平移来重合,如有差异就容易视觉疲劳,见图12)。因此,左右眼画面和虚拟像面距离(Virtual image distance,VID)的一致性,对VR眼镜的使用体验有较大影响。
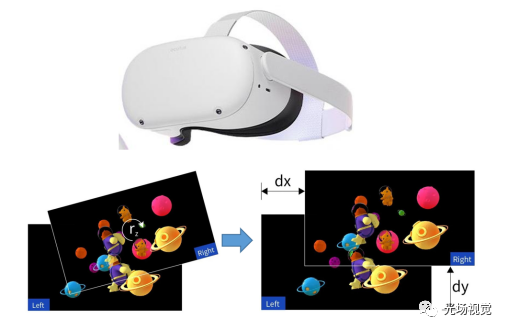
图12 VR眼镜合像特性
由于VR眼镜投射的是光线而非实物,无法使用接触式三维测量技术以及依赖主动光源的结构光、TOF、线激光等测量方式。而在被动式三维测量技术中, 双目视觉技术由于基线距离、双相机光轴无法与VR眼镜统一等原因,也无法完成虚拟像面距离测量。因此,光场成像测量方式在VID测量上具有绝对优势。VOMMA首次运用光场成像技术对VR眼镜左右眼形成的虚拟像面分别进行了测量,测量效果如图13所示。
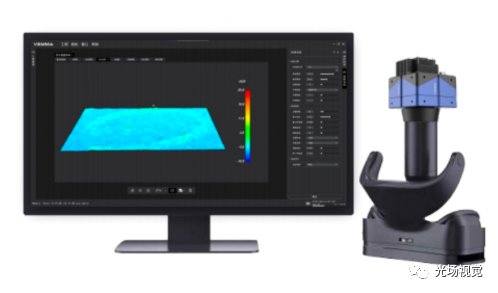
图13 VOMMA虚拟像面测量应用案例
四、总结
光场相机应用场景广泛,特别是在工业检测领域,其独特优势使得这项技术具备相当大的发展潜力,光场相机的出现为工业检测领域注入了新的活力。国内的光场技术研发公司,如VOMMA,一直致力于光场相机的研发和创新。他们不断提升光场相机的分辨率和成像质量,拓展其在工业检测领域的应用。通过不断优化算法和硬件设计,光场相机的性能得到了大幅提升,使得其在工业检测应用上展现出更大的潜力。
总而言之,光场相机在工业检测领域具备广泛的应用场景和潜力。其能够提供更加准确和全面的图像数据,有助于实现精确的工业检测和质量控制。随着光场相机技术的不断发展和创新,相信它将会在工业检测应用上大放异彩。

