关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
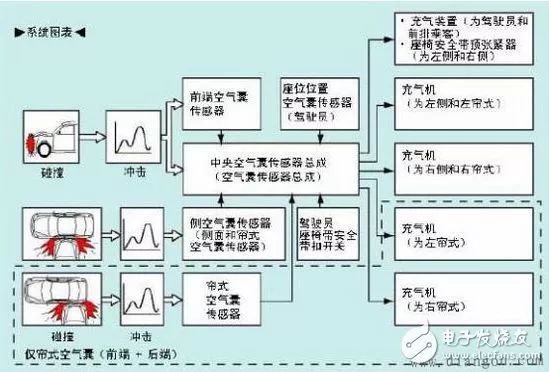
碰撞传感器是安全气囊系统中的控制信号输入装置。其作用是在汽车发生碰撞时,由碰撞传感器检测汽车碰撞的强度信号,并将信号输入安全气囊电脑,安全气囊电脑根据碰撞传感器的信号来判定是否引爆充气元件使气囊充气。碰撞传感器多数采用惯性式机械开关结构,相当一只控制开关,其工作状态取决于汽车碰撞时加速度的大小。
碰撞传感器作用:检测汽车发生碰撞时的极大减速度下的惯性力,并将检测信号输入到安全气囊系统的电子控制装置。
汽车碰撞传感器原理
碰撞传感器的应用非常广泛,特别是在汽车的安全系统里面,而且现在一些机器人上也都开始搭载了碰撞传感器,这里我们先来了解下汽车碰撞传感器原理。
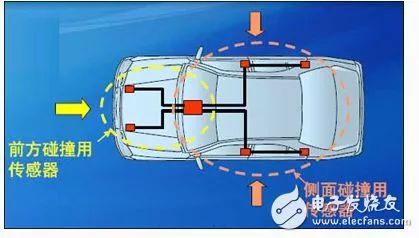
一般情况下,汽车会在三个主要地方都安装碰撞传感器,左前、右前器和中央
汽车一般设有多个触发碰撞传感器,安装位置一般在车身的前部和中部,例如车身两侧的翼子板内侧、前照灯支架下面以及发动机散热器支架两侧等部位。随着碰撞传感器制造技术的发展,有些汽车将触发碰撞传感器安装在气囊电脑内。防护碰撞传感器一般都与气囊电脑组装在一起,多数安装在驾驶舱内中央控制台下面。
安全气囊需要要配合安全带才能发挥作用,而要使得安全气囊正常工作的首要条件就是汽车碰撞传感器必须要正常工作,在碰撞发生的极短的时间内给出信号给中央控制器,中央控制发出弹射安全气囊的指令。
中央控制器是安全气囊系统的控制中心,其功用是接收碰撞传感器及其他传感器输入的信号,判断是否点火引爆气囊充气,并对系统故障进行自诊断。
中央控制器由点火控制器、驱动电路、储存电路、诊断电路等组成。在点火控制器中关键是点火控制算法,其决定了气囊的点爆时间和粗糙路面抗干扰特性,这是气囊控制的核心技术。由于实际车辆结构各不相同,碰撞特性也不同,因此关于点火控制算法也发展了很多种,以适应于不同情况,而且还在继续发展。
现在使用的有速度变量法,加速度坡度法,比功率法等。对于正碰撞来说,碰撞传感器及控制系统一般需在20ms内判断是否需要点火,且点火后30ms气囊必须完全充满气体。
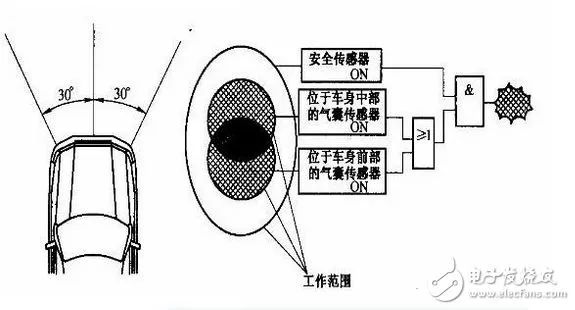
当汽车速度在30km/h以上受到正面碰撞(碰撞角度与汽车中轴线成30°角度之内)或侧面碰撞时,安装在汽车前部或侧面的碰撞传感器利用碰撞时产生的惯性力,检测到碰撞作用的时间、汽车减速度即碰撞强度。再跟出厂前设置的参数进行对比,看看是否达到设定的值,如果超过设定值就会给出报警信号。
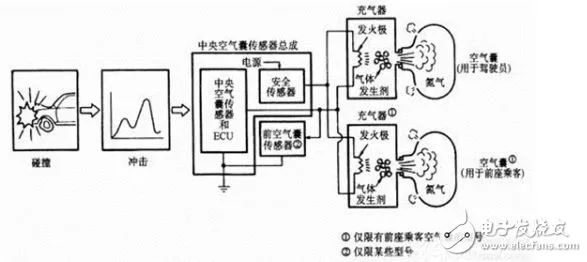
 SRSECU将碰撞传感器送来的碰撞信号与ECU内储存的碰撞触发数据进行比较,如果判定碰撞强度达到或超过其规定值,则指令接通安全气囊引爆管的工作电路,引爆管迅速爆炸燃烧,并引燃气体发生器内的气体发生剂。气体发生剂的燃烧十分剧烈,在瞬间产生释放出大量气体,经过滤冷却后充入折叠的安全气囊,使气囊在极短的时间内突破衬垫迅速膨胀展开成扁球状。在驾驶员或乘员头部、胸部或身体因碰撞时的反冲力向前或向侧面冲去时,鼓起的气囊在驾驶员或乘员的前部或侧面车身硬件间成弹性缓冲气垫,利用气体本身的阻尼作用或气囊背面排气孔排气节流的阻尼作用,吸收并分散驾驶员和乘员的冲击能量。气囊鼓起后很快就从气囊背面的小孔排出部分气体而变瘪,柔软的气囊表面就能有效地保护人体头部、胸部和身体其他部分免受冲击伤害或减轻伤害程度。
SRSECU将碰撞传感器送来的碰撞信号与ECU内储存的碰撞触发数据进行比较,如果判定碰撞强度达到或超过其规定值,则指令接通安全气囊引爆管的工作电路,引爆管迅速爆炸燃烧,并引燃气体发生器内的气体发生剂。气体发生剂的燃烧十分剧烈,在瞬间产生释放出大量气体,经过滤冷却后充入折叠的安全气囊,使气囊在极短的时间内突破衬垫迅速膨胀展开成扁球状。在驾驶员或乘员头部、胸部或身体因碰撞时的反冲力向前或向侧面冲去时,鼓起的气囊在驾驶员或乘员的前部或侧面车身硬件间成弹性缓冲气垫,利用气体本身的阻尼作用或气囊背面排气孔排气节流的阻尼作用,吸收并分散驾驶员和乘员的冲击能量。气囊鼓起后很快就从气囊背面的小孔排出部分气体而变瘪,柔软的气囊表面就能有效地保护人体头部、胸部和身体其他部分免受冲击伤害或减轻伤害程度。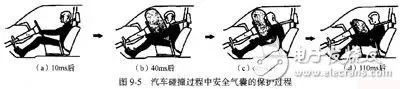
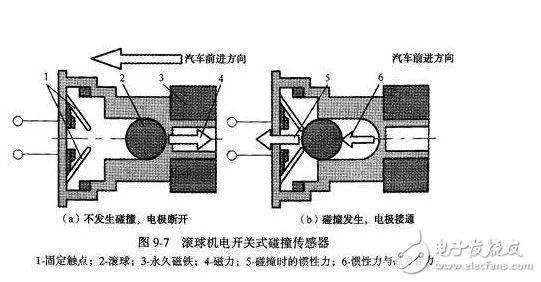
我们以德国博世(BOSCH)公司生产的SRS在奥迪轿车上进行的试验来说明下安全气囊工作状态,当汽车以50km/h的速度撞击前方障碍物时,安全气囊系统的保护动作过程可分为图9-5所示的4步。1) 见图9-5(a),碰撞约10ms后,SRS达到引爆极限。引爆管引爆产生大量热能,点燃气体发生剂叠氮化钠药片,使其受热分解。此时驾驶员尚未因碰撞惯性向前倾。2) 见图9-5(b),碰撞约40ms后,安全气囊完全充气膨胀,体积变到最大。驾驶员由于碰撞惯性力作用向前扑,此时系在驾驶员身上的安全带迅速收紧,吸收了部分冲击能量。3) 见图9-5(c),碰撞约60ms后,驾驶员头部及身体上部快速压向已膨胀的安全气囊,人体的冲击能量被弹性气囊吸收并扩散。安全气囊背面的排气孔在气体张力和人体压力的作用下,向外排气,排气节流阻尼进一步吸收人体与安全气囊之问弹性碰撞产生的动能,有效地保护了驾驶员的生命安全。4) 见图9-5(d),碰撞约110ms后,大部分气体已从安全气囊逸出,气囊变瘪,防止了驾驶员被膨胀的气囊憋气窒息。在安全带作用下,驾驶员上身后倾回到座椅靠背上,汽车前方恢复视野。碰撞约120ms后,汽车碰撞产生的动能危害完全解除,车速降低直至为零。汽车安全气囊系统中常用的碰撞传感器一般可以分成滚球式碰撞传感器、滚轴式碰撞传感器、偏心锤式碰撞传感器、水银开关式碰撞传感器、电阻应变计式碰撞传感器、压电效应式碰撞传感器六大类,下文我们会详细介绍这六大类碰撞传感器的工作原理。滚球式碰撞传感器又称为偏压磁铁式碰撞传感器,结构如图1所示,主要由铁质滚球、永久磁铁、导缸、固定触点和壳体组成。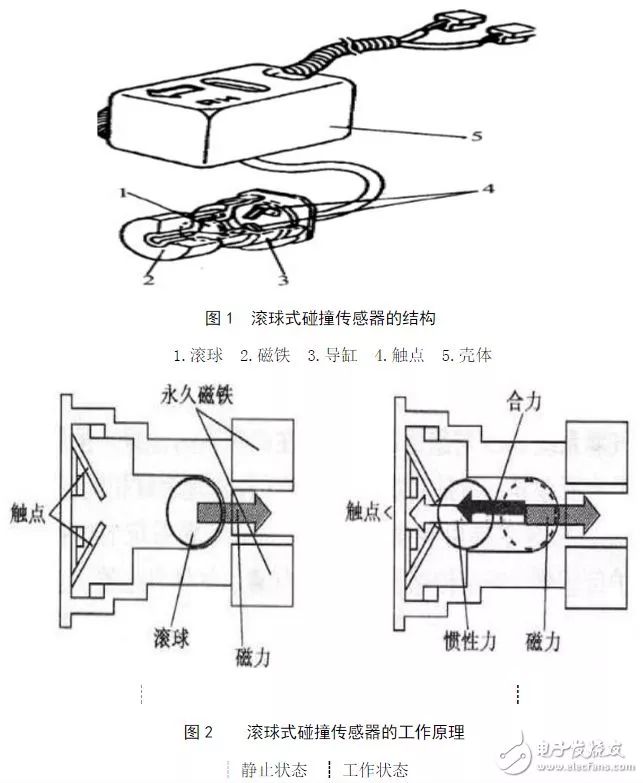
两个触电分别与传感器引线端子连接。滚球用来感测减速度大小,在导缸内可以移动或滚动。壳体5上印制有箭头标记,方向与传感器结构有关,有的规定指向汽车前方(如丰田凌志LS400型轿车),有的规定指向汽车后方,因此在安装传感器时,箭头方向必须符合使用说明书规定。滚球式碰撞传感器工作原理如图2所示。当传感器处于静止状态时,在永久磁铁作用下,导缸内的滚球被吸向磁铁,两个触点与滚球分离,传感器电路处于断开状态,如图2所示。当汽车遭受碰撞且减速度达到设定阈值时,滚球产生的惯性力将大于永久磁铁的电磁吸力。滚球在惯性力作用下就会克服磁力沿导缸向两个固定触点运动并将固定触点接通,如图2所示。当传感器用作碰撞传感器信号时,固定触点接通则将碰撞信号输入SRS ECU;当传感器用作碰撞防护传感器时,则将点火器电源接通。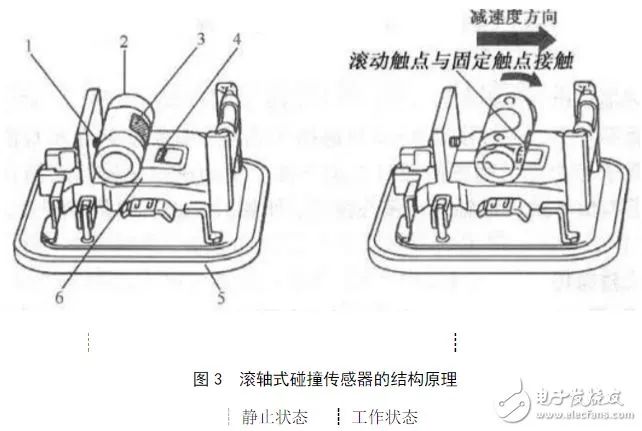
片状弹簧6一端固定在底座5上,并与传感器的一个引线端子连接,另一端绕在滚轴2上,滚动触点3固定在滚轴部分的片状弹簧上,并可随滚轴一起转动。固定在触点4与片状弹簧6绝缘固定在底座5上,并与传感器的另一个引线端子连接。当传感器处于静止状态时,滚轴在片状弹簧的弹力作用下滚向止动销一端,滚动触点与固定触点处于断开状态,如图3所示,传感器电路断开。当汽车遭受碰撞且减速度达到设定阈值时,滚轴产生的惯性力将大于片状弹簧的弹力。滚轴在惯性力作用下就会克服弹簧弹力向右滚动,滚动触点与固定触点接触,如图3所示。当传感器用作碰撞信号传感器时,滚动触点与固定触点接触则将碰撞信号输入SRSECU;当传感器用作碰撞防护传感器时,则将点火器电源电路接通。偏心锤式碰撞传感器又称为偏心转子式碰撞传感器。丰田、马自达汽车SRS采用了这种传感器,其结构如图4所示。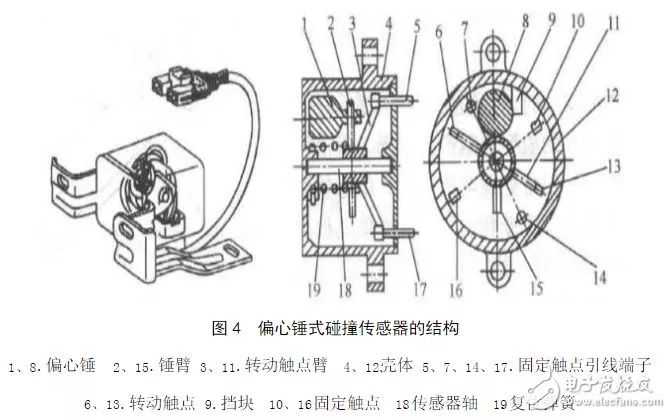
转子总成由偏心锤1、转动触点臂3及转动触点6与13组成,安装在传感器轴18上。偏心锤偏心安装在偏心锤臂上。转动触点臂3与11两端固定有触点6与13,触点随触点臂一起转动。两个固定触点10与16绝缘固定在传感器壳体上,并用导线分别与传感器接线端子7、14连接。偏心锤式传感器的工作原理如图5所示。当传感器处于静止状态时,在复位弹簧作用下,偏心锤与挡块保持接触,转子总成处于静止状态,转动触点与固定触点断开,如图5所示,传感器电路处于断开。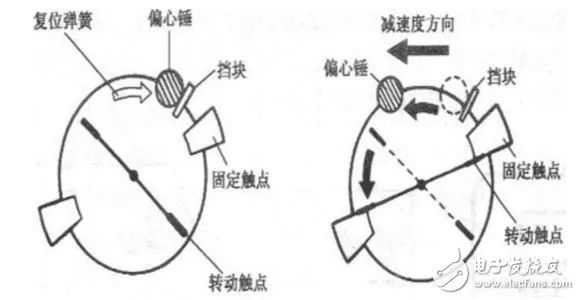
当汽车遭受碰撞且减速度达到设定阈值时,偏心锤产生的惯性力矩将大于复位弹簧的弹力力矩,转子总成在惯性力矩作用下克服弹簧力矩沿逆时针方向转动一定角度,同时带动转动触点臂转动,并使转动触点与固定触点接触,如图5所示。当传感器用作碰撞信号传感器时,转动触点与固定触点接触则将碰撞信号输入SRSECU;当传感器用作碰撞防护传感器时,则将点火器电源电路接通。水银开关式碰撞传感器是利用水银具有良好的导电特性而制成的,结果如图6所示,主要由水银、壳体、电极和密封螺塞组成。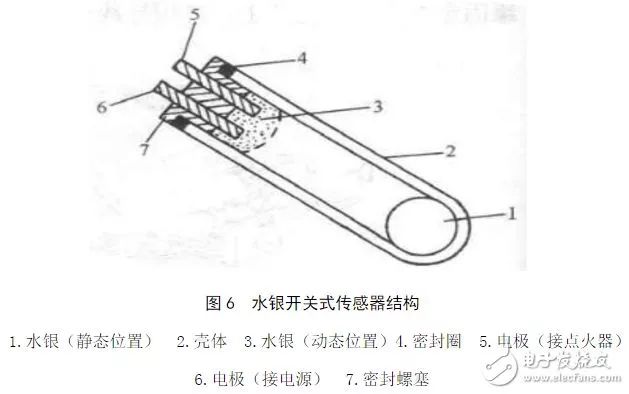
当汽车发生碰撞时,减速度将使水银产生惯性力。惯性力在水银运动方向上的分力会将水银抛向传感器电极,使两个电极接通,从而接通气囊点火器电路的电源。德国博世公司研制生产的电阻应变计式碰撞传感器的结构如图7┊所示,主要由电子电路4、电阻应变计5、震动块6、缓冲介质7、和壳体3等组成。电子电路包括稳压与温度补偿电路W、信号处理与放大电路A。应变计的电阻R?、R?、R?、R?制做在硅膜片8上,如图7所示。当膜片产生变形时,应变电阻的阻值就会发生变化。为了提高传感器的检测精度,应变电阻一般都连接成桥式电路,并设计有稳压和温度补偿电路,如图7所示。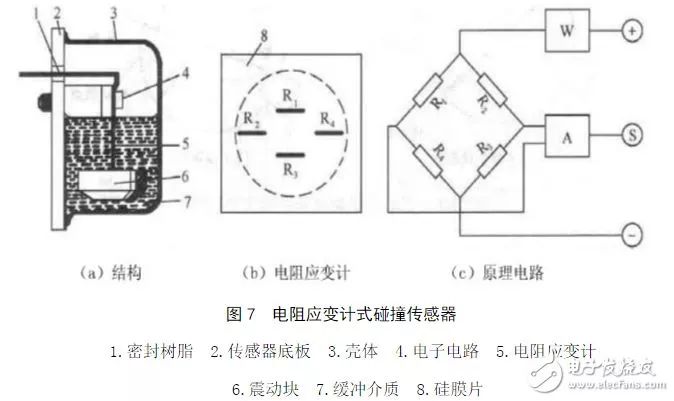
当汽车遭受碰撞时,震动块震动,缓冲介质随之震动,应变计的应变电阻产生变形,阻值随之发生变化,经过信号处理与放大后,传感器S端输出的信号电压就会发生变化。SRS电脑根据电压信号强弱便可判断碰撞的劣度(激烈程度)。如果电压超过设定值,SRS电脑就会立即向点火器发出点火指令引爆点火剂,使充气剂受热分解产生气体给气囊充气压电效应式碰撞传感器是利用压电效应制成的传感器。压电效应是指压电晶体在压力作用下,晶体外形发生变化而使其输出电压发生变化的效应。压电晶体通常用石英或陶瓷制成。在压力作用下,压电晶体的外形和输出电压就会发生变化。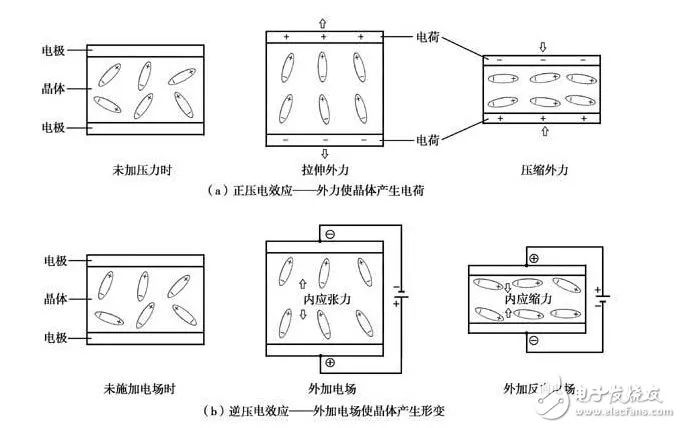
当汽车遭受碰撞时,传感器内的压电晶体在碰撞产生的压力作用下,输出电压就会变化。SRS电脑根据电压信号强弱便可判断碰撞的烈度。如果电压信号超过设定值,SRS电脑就会立即向点火器发出点火指令,引爆点火剂使气体发生器给气囊充气,SRS气囊膨开,达到保护驾驶员和乘员之目的。关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯