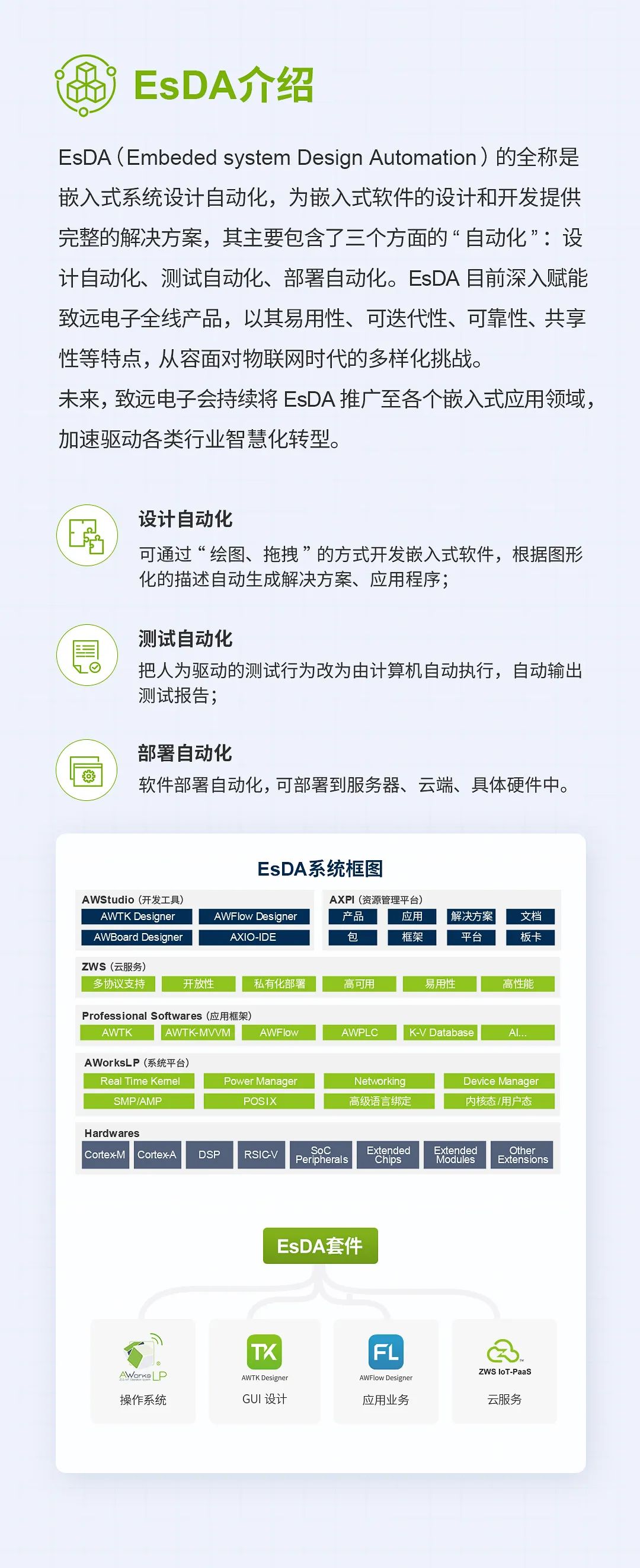
Modbus作为一种公开、免费的现场总线,被广泛应用于工业电子领域。本文基于EsDA开发平台,为您详细介绍Modbus主机功能节点的使用方式,以及如何快速实现读取Modbus从机数据。 Modbus简介Modbus是一种串行通信协议,由于其公开、免费、易于部署和维护的优点,被广泛应用于工业电子领域,并且已经成为工业领域通信协议的业界标准。
Modbus简介Modbus是一种串行通信协议,由于其公开、免费、易于部署和维护的优点,被广泛应用于工业电子领域,并且已经成为工业领域通信协议的业界标准。
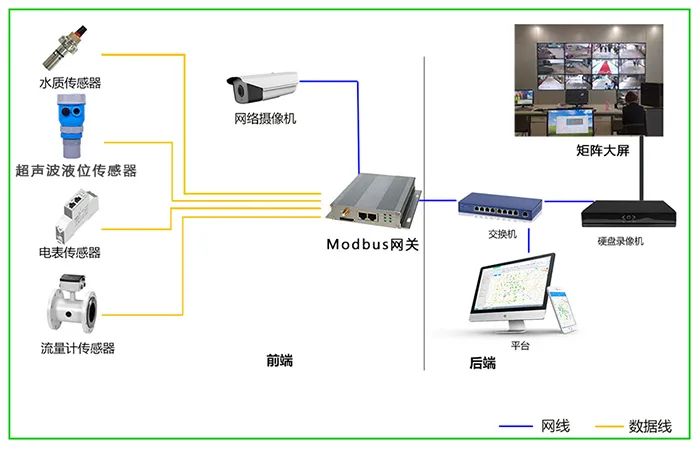
(图片源自网络,侵删)
以往我们在使用Modbus协议进行应用开发时,通常需要自己实现诸多的Modbus功能码,或者移植开源的第三方库,这个过程往往比较费时费力,耽误项目的进展。基于EsDA设计的Modbus主机功能节点,可以通过简单的拖拽、连线方式,快速实现读取Modbus从机数据,搭配其他功能节点,可以快速搭建出一个集数据采集上报、远程控制于一体的物联网应用。 Modbus相关节点介绍目前和Modbus主机相关的节点主要有6个,分别是modbus_master_rtu、modbus_master_in、modbus_master_dynamic_in、modbus_master_out、modbus_parse_in和modbus_parse_out节点。其中,modbus_master_rtu节点属于配置节点,用于配置Modbus通信设备的参数信息,该节点提供了Modbus RTU和Modbus TCP的主机通信服务;modbus_master_in和modbus_master_dynamic_in是Modbus的输入节点,主要用于读取从机设备的线圈量和寄存器数据;modbus_master_out是数据的输出节点,用于写线圈量和寄存器;modbus_parse_in和modbus_parse_out是扩展的Modbus功能节点,一般用来对输入/输出数据进行处理。
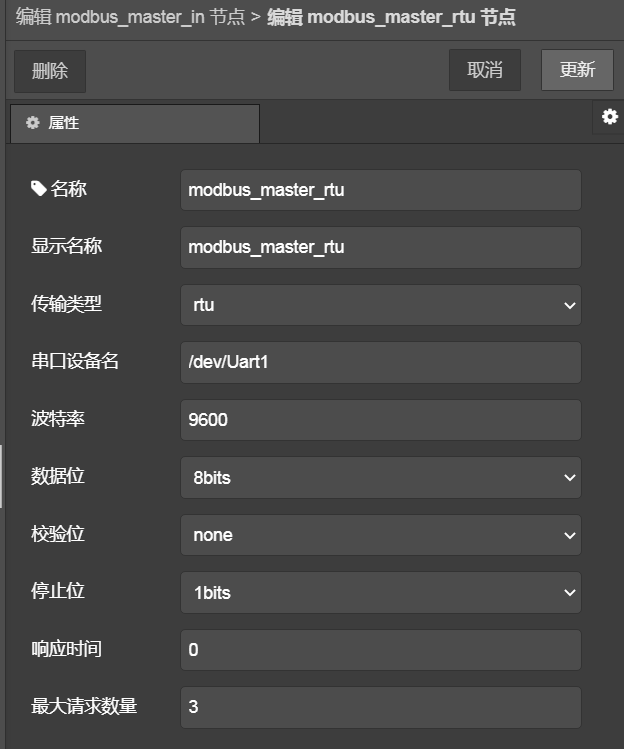
 modbus_master_rtu节点
modbus_master_rtu节点Modbus主机的配置节点,用于配置与Modbus主机通信的从设备的通信参数,提供了Modbus RTU和Modbus TCP主机功能。该节点需要和对应的功能节点搭配使用,不会在画布中显示。
1. 属性
modbus_master_rtu节点包含了RTU和TCP两种模式的配置,不同模式需要设置的属性不同。
1.1 RTU模式配置属性
- 传输类型:用于设置链路层的传输模式(rtu/tcp可选);
- 最大请求数量:用于配置Modbus主机读写请求的最大数量。
1.2 TCP模式配置属性
- 最大请求数量:用于配置Modbus主机读写请求的最大数量。
2. 使用方法
该节点的使用依附于modbus_master_in、modbus_master_dynamic_in以及modbus_master_out等节点,使用时选择对应的通信模式,根据从机信息配置相应的配置属性即可。
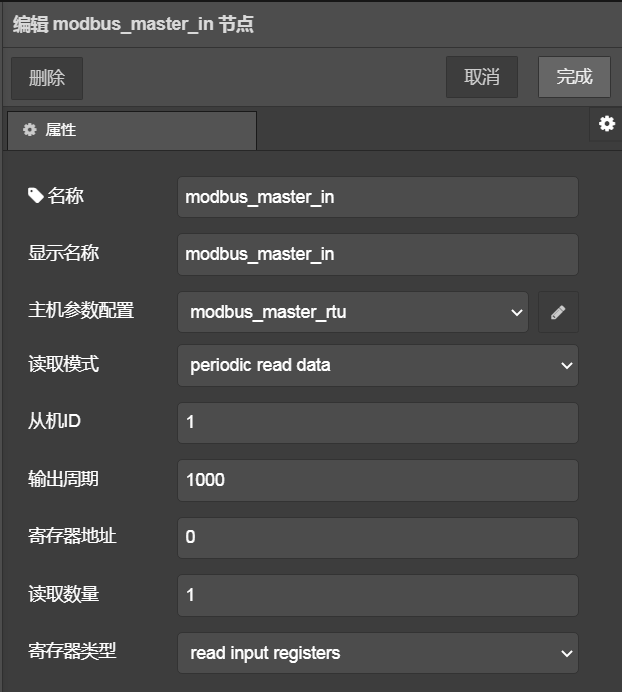
modbus_master_in节点modbus_master_in是Modbus的输入节点,主要用于读取从机设备的线圈量和寄存器数据并输出给消费者节点。其输出是原始数据的缓冲区,后续可连接modbus_parse_in节点对数据进行处理。
1. 属性
- 主机参数配置:输入节点依赖modbus_master_rtu节点,选择对应的配置节点即可;
- 读取模式:选择节点的触发方式,可选择以用户设定的输出周期定时向消费者节点输出数据;也可根据输入的信息(来自push节点)进行数据读取并输出;
- 寄存器类型:用于选择读取目标的类型,可选线圈量、离散量、输入寄存器、保持寄存器。
2. 输入
该节点属于pump类型节点,一般不需要数据输入,但可以使用push节点来实现数据输入。- address:需要被读取的寄存器/线圈的起始地址;
3. 输出
- slaveID:从机设备的ID地址,通常用于后级节点区分设备;
4. 使用方法
这里我们借助ZC1平台和一个RS485型的温湿度变送器来说明节点的使用方法。按照下图所示分别给ZC1开发板和传感器供电,并连接好RS485的A、B两线。4.1 添加节点
添加modbus_master_in、modbus_parse_in、fscript以及log节点到画布上并连接节点。
4.2 配置节点
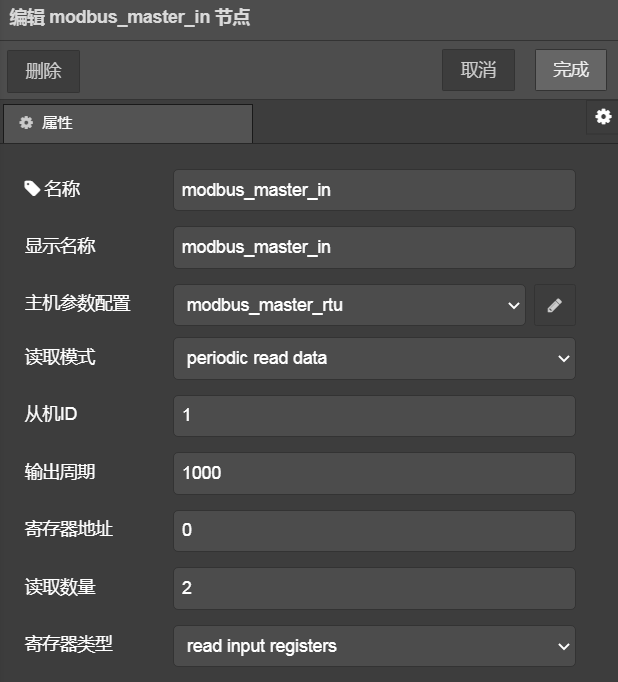
双击modbus_master_in节点打开属性配置面板。
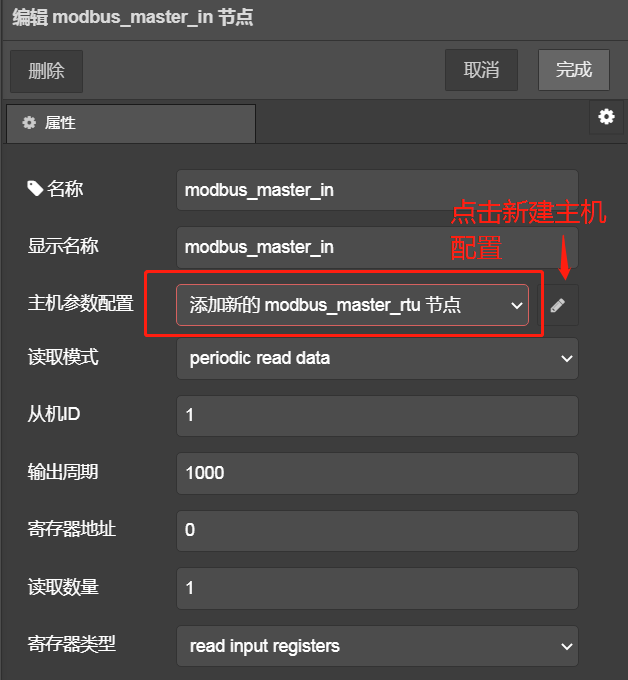
选择“添加新的modbus_master_rtu节点”,进入配置主机参数面板。
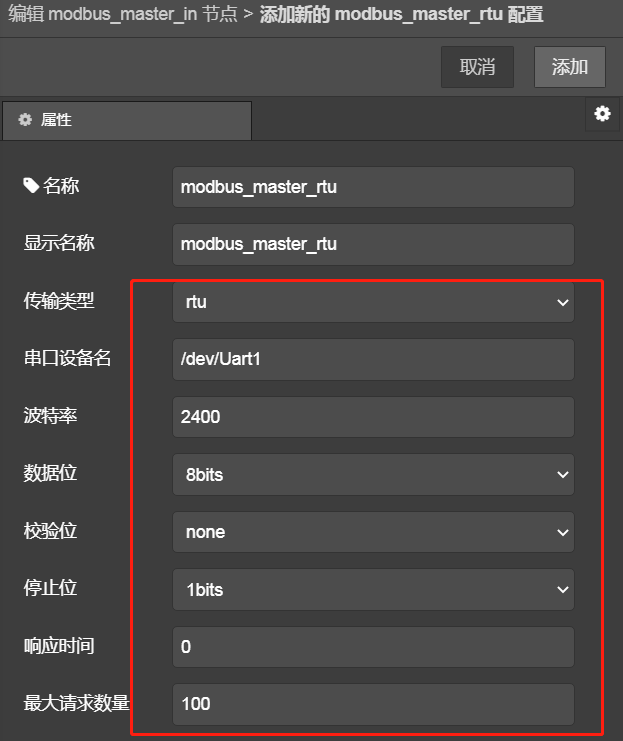
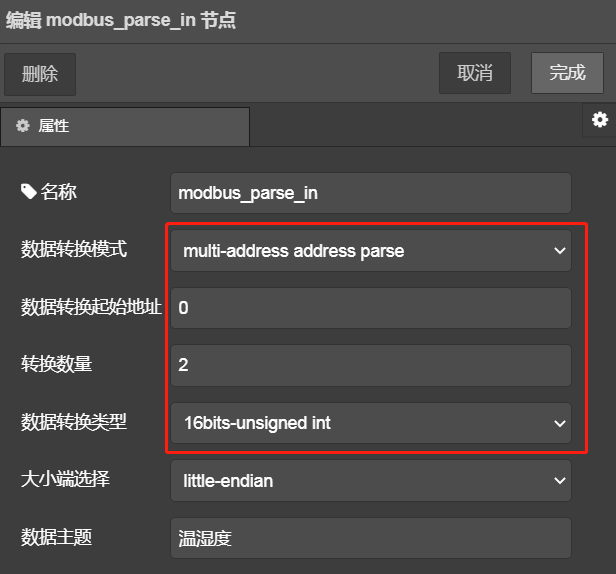
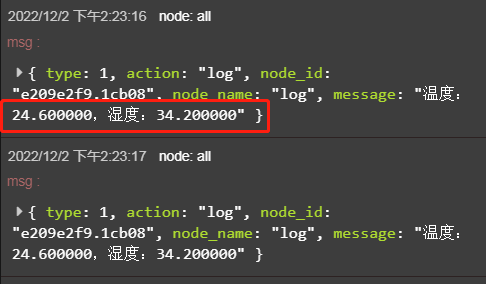
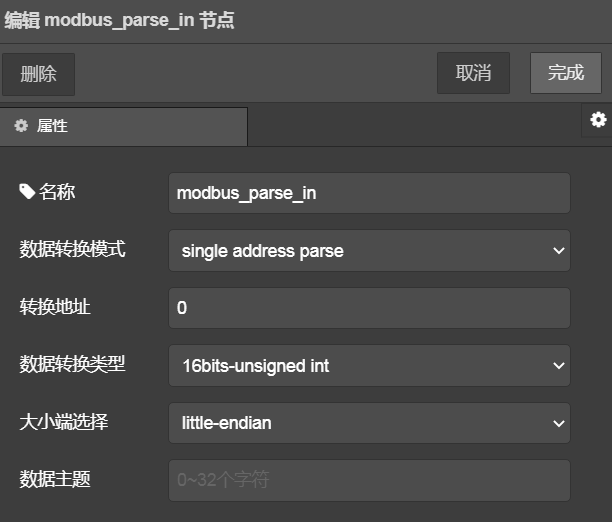
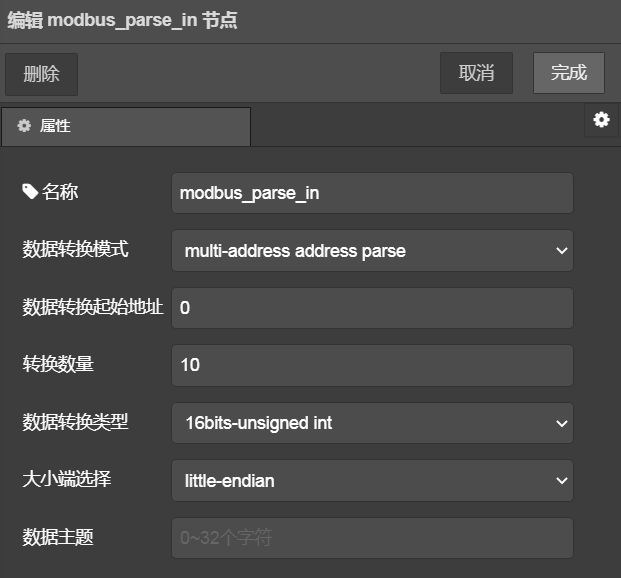
根据实际情况配置完相应的参数后,点击添加,回到modbus_master_in节点配置界面。可以看到已经创建了一个新的主机参数配置 ,同时配置读取模式为周期读取,从机ID、输出周期、寄存器地址等参数按照实际设备进行配置 。然后双击modbus_parse_in节点打开属性配置面板,对modbus_parse_in进行转换规则设置。这里我们选择多地址转换模式,分别对温度和湿度两个寄存器进行转换,因此转换数量设置为2,转换类型设置为16位。接下来设置modbus_parse_in节点的后级节点fscript,主要是对后续的打印信息进行格式化。由于modbus_parse_in节点的输出payload是array型对象,这里我们可以通过fscript的内置方法array_get来获取数据。fscript的内容如下:a = msg.payloadmsg.payload = "温度:"+array_get(a,0)/10 +",湿度:"+array_get(a,1)/10
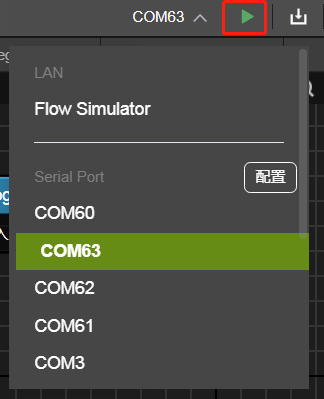
4.3 下载验证
连接好硬件,通过下载接口下载流图进行验证。
modbus_master_dynamic_in节点modbus_master_dynamic_in同样是Modbus的输入节点,与modbus_master_in的区别是:modbus_master_dynamic_in节点是filter类型的节点,其根据前级节点输入的信息向从机设备读取数据,并输出给消费者节点。
1. 属性
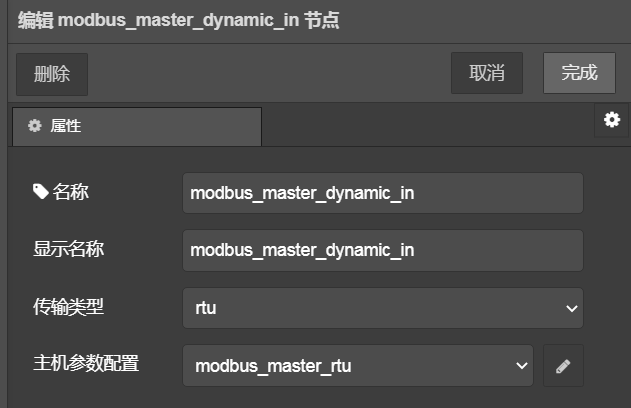
- 传输类型:用于设置链路层的传输模式(rtu/tcp可选);
- 主机参数配置:输入节点依赖modbus_master_rtu节点,和使用modbus_master_in节点时一样,选择对应的配置节点即可;
2. 输入
3. 输出
3. 使用方式
modbus_master_dynamic_in节点一般是由fscript节点指明需要读取的从机设备的信息,节点本身只需要创建并配置相应的主机即可。对于modbus_master_dynamic_in的输出缓冲区,我们同样使用modbus_parse_in节点进行处理。在fscript中指明读取内容时,只需提供以下信息:
msg.slaveID = 1msg.address = 0msg.reg_num = 2msg.reg_type = 4
modbus_master_out节点modbus_master_out节点是Modbus的输出节点,用于写线圈量和寄存器。
1. 属性
- 主机参数配置:输出节点依赖modbus_master_rtu节点,选择对应的配置节点即可;
2. 输入
- slaveID:从机设备的ID地址,如果输入中包含此参数,则忽略属性中的地址;
- payload:写入缓冲区,存储待写入的数据,一般由modbus_parse_out输入;
- payloadLength:写入缓冲区的字节长度。
3. 输出
modbus_master_out节点是sink类型的节点,一般没有输出。
4. 使用方法
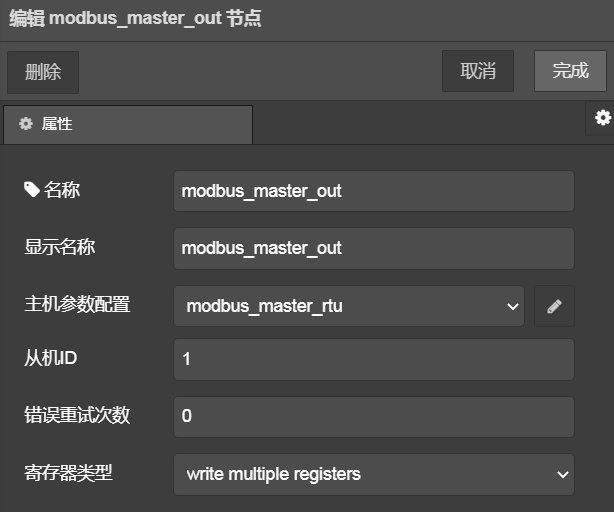
modbus_master_out节点通常由modbus_parse_out节点进行输入。使用时和modbus_master_in一样创建一个主机配置,指明待写入设备的ID地址以及寄存器类型即可。
其中,modbus_parse_out节点的输入一般来自fscript节点,我们可以在fscript中借助array对象完成数据输入。比如我们需要将从机地址为1的设备的寄存器0设置为2,我们只需在fscript中添加如下内容:
var a = array_create();array_isert(a,0,2);
msg.payload = a;msg.slaveID = 1;msg.address = 0;
modbus_parse_in节点
Modbus输入数据的转换节点,这个节点一般用于接收Modbus输入节点的原始数据,将其转换成单个value或者array对象,以便于后续处理。
1. 属性
- 数据转换模式:可以选择对输入中的单个地址的数据进行转换,也可以选择对指定数量的寄存器、或者对输入的所有地址进行转换;
- 转换地址:选择单个寄存器转换时,填写需要转换的寄存器地址;
- 数据转换起始地址:选择转换多个寄存器时,指明转换的起始地址;
2. 输入
modbus_parse_in的输入来自modbus_master_in或modbus_master_dynamic_in节点。- payload:数据缓冲区指针,存储读取到的数据;
- payloadLength:读取到的字节数据长度;
- poll_result:上一级节点读取数据是否成功。
3. 输出
- address:转换单个寄存器时,指示数据的寄存器地址;在转换多个寄存器模式下,指示起始的寄存器的地址;
- payloadType:指示缓冲区的类型是value还是array;
- payload:转换后的数据缓冲区,在转换单个寄存器时,payload的类型是value,可直接读取;当转换多个寄存器时,payload是个array对象,可以使用rbuffer进行读取;
- poll_result:上一级节点读取数据是否成功。
4. 使用方法
modbus_parse_in节点使用时需要指定转换的模式、待转换的寄存器地址和数量、待转换寄存器的数据类型以及系统的大小端模式。
作为filter类型节点,modbus_parse_in通常是从modbus_master_in节点获取输入。其输出有两种类型,在转换单个寄存器时,payload的类型是value,可以直接读取。当转换多个寄存器时,payload是个array对象,可以在fscript中通过array对象的方法进行处理。a = msg.payload
print("湿度 " + array_get(a, 0))print("温度 " + array_get(a, 1))
modbus_parse_out节点modbus_parse_out节点通常用于将fscript节点输出的value或array对象转换成Modbus标准的十六进制格式,后续可以将相应的数据指针传入Modbus的输出节点modbus_master_out进行使用。
1. 属性
- 寄存器起始地址:指明需要modbus_master_out写入的寄存器的起始地址,如果节点的输入不包含msg.address,则使用此属性指向的地址;
- 主题:如果设定了主题,则节点只处理属于自己的主题消息。
2. 输入
- payload:待写入的值,可以是value类型,也可以是array对象;
- topic:输入的数据主题,如果本节点设置了主题属性,则只有输入的主题与节点的主题属性匹配,节点才会对下一节点输出;
3. 输出
- payload:转换后的Modbus标准十六进制数组缓冲区指针;
- payloadLength:数组缓冲区的字节长度。
4. 使用方法
modbus_parse_out节点的前级通常是fscript,使用时在fscript中指明待写入的从机设备ID地址、并传递构建好的array对象即可。其后级节点一般是modbus_master_out节点,通过modbus_master_out节点将数据写入目标设备。
其中,在fscript中构建array对象的方法如下:a = array_create();array_insert(a, 0, u16(1))array_insert(a, 1, u16(2))array_insert(a, 2, u16(3))
output.payload = a;output.slaveID = 10;output.address = 0;
关联产品 技术交流群长按识别如下二维码可加入“EsDA嵌入式系统设计自动化交流群”,与志同道合的朋友交流,并有专业技术人员为您答疑解惑,如有问题可以咨询小致微信:zlgmcu-888。