1. Scara机械臂介绍
Scara机械臂(Selective Compliance Assembly Robot Arm)是一种常见的工业机械臂,其结构形状类似于人的手臂,由垂直支柱和水平臂组成,它主要用于装配、搬运和定位等任务。Scara机械臂在自动化生产线和工业应用中广泛应用,它能够有效地替代人工劳动,并提高生产效率和质量。同时由于其结构简单、稳定可靠,维护和操作也相对容易。
Scara机械臂通常具有以下特点:
① 三维工作空间:Scara机械臂具有较大的工作空间,可以在水平平面内进行移动,并通过旋转关节实现上下运动。这使得它适用于多种应用场景,如装配线、仓储物流等。
② 选择性柔顺性:Scara机械臂具有可选择的柔顺性,即在水平平面内具有较高的刚性,但对垂直方向的力和扭矩具有柔顺性。这种设计使得它能够精确地控制位置和姿态。
③ 四自由度:Scara机械臂通常具有四个独立驱动关节,分别控制基座旋转、水平臂伸缩、前臂旋转和末端执行器的运动。这样的结构使得它具备较高的运动灵活性和精度。
④ 高重复定位精度:Scara机械臂的结构设计和控制系统使其能够实现高精度的重复定位。这使得它适用于需要精确定位和装配的任务,如电子元器件组装、挑选和放置等。
⑤ 快速运动速度:Scara机械臂通常具有较快的运动速度,可以快速完成搬运和装配任务。这提高了生产效率和工作效率。
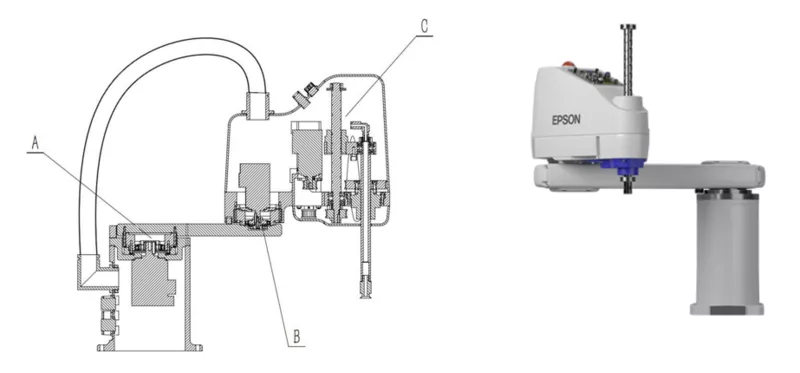
SCARA属于平面关节机械臂,机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。SCARA机械臂包含三个旋转关节,一个直线关节。按照关节放置的位置可以组合为:RRRP、RPRR、PRRR,在实际的工业中常用RRP型,也就是Axis1、Axis2、Axis3先为旋转轴,Axis4为直线轴,这类机器人的结构轻便、响应快。
五连杆Scara机械臂
五连杆Scara机械臂的运作效果详情可参考【A003】花生点播机器人项目
2. Scara机械臂运动学反解计算
机器人运动学就是根据末端执行器与所选参考坐标系之间的几何关系,确定末端执行器的空间位置和姿态与各关节变量之间的数学关系。包括正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)两部分。
正运动学就是根据给定的机器人的各个关节变量,计算末端执行器的位置和姿态。
反解(逆向运动学)则是根据已知的末端执行器的位置和姿态,计算机器人各个关节变量,也被称为机器人运动学求解。
关节变量 —–> 机械臂末端执行器的姿势 = 正向运动学
机械臂末端执行器的位姿 —–> 关节变量 = 逆向运动学
基本步骤:
(1)确定关节、连杆及其参数
这里我们选择一个PRR分布的SCARA机械臂进行计算,同时为了简化计算,我们去掉了末端的旋转关节。
(2)简化模型设定坐标系
为方便计算:
① 从俯视图看,将第二关节旋转中心作为坐标原点建立坐标系
② 以竖直向上为+Z轴
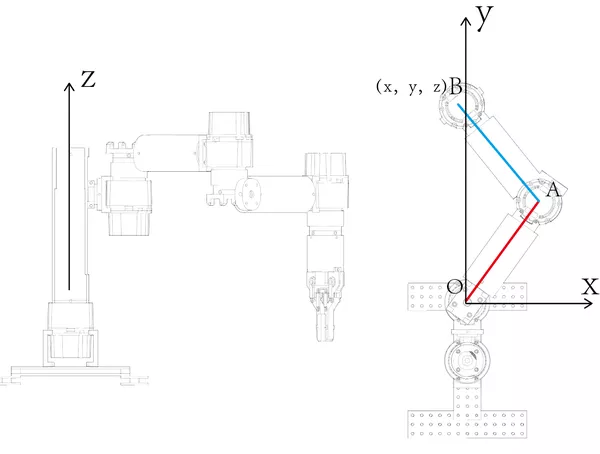
(3)计算运动学反解
这里我们设定:
已知B点坐标为(x,y,z)
OA为大臂长度=L1
OB为小臂长度=L2
我们需要求解:
① 大臂转动角度
② 小臂转动角度
③ 第一关节的运动距离
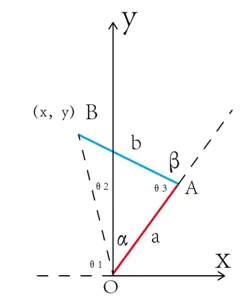
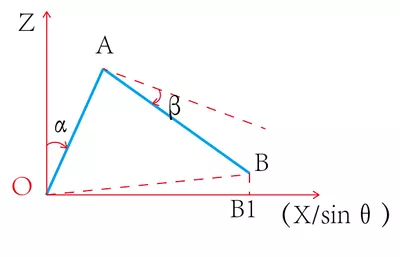
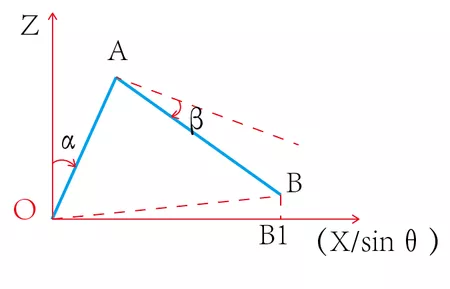
其中α和β为我们所求大臂和小臂转动角度。θ1、θ2、θ3为辅助计算角度。
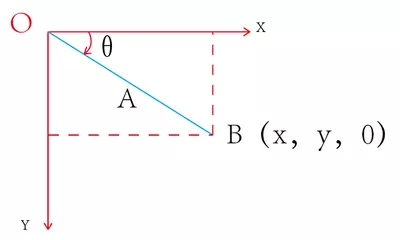
求解转台角度θ:
求解大臂角度α:
求解小臂角度β: