

Kdump是在系统崩溃、死锁或死机时用来转储内存运行参数的一个工具和服务,是一种新的crash dump捕获机制,用来捕获kernel crash(内核崩溃)的时候产生的crash dump。
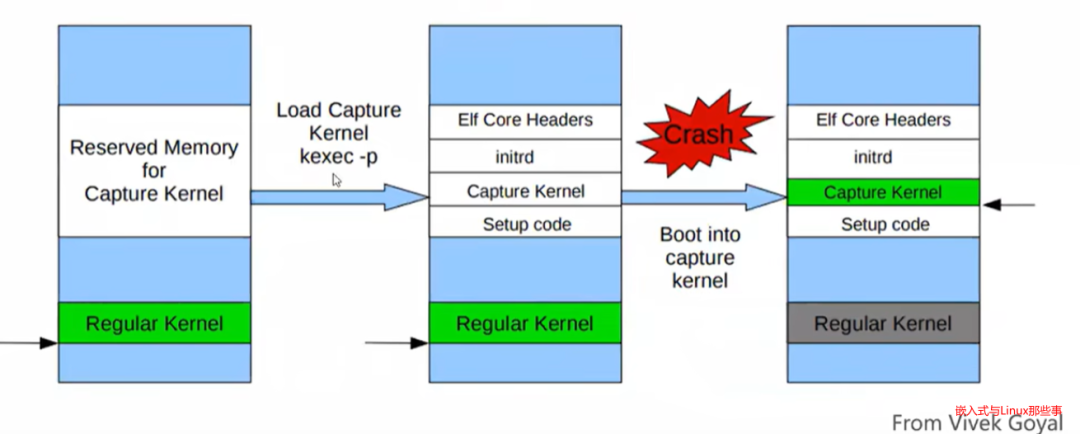
Kdump 使用两个内核:生产内核和捕获内核。生产内核是一个普通内核,它使用特殊的 kdump 特定标志启动。我们需要告诉生产内核保留一些物理内存,用于加载捕获内核。我们需要提前加载捕获内核,因为在崩溃发生的那一刻,由于内核损坏,无法从磁盘读取任何数据。
生产内核是捕获内核服务的对像。捕获内核会在生产内核崩溃时启动起来,与相应的ramdisk一起组建一个微环境,用以对生产内核下的内存进行收集和转存。
第一个内核保留了内存的一部分给第二内核启动用。由于kdump利用kexec启动捕获内核,绕过了 BIOS,所以第一个内核的内存得以保留。这是内核崩溃转储的本质。
为了在生产内核崩溃时能顺利启动捕获内核,捕获内核以及它的ramdisk是事先放到生产内核的内存中的。
生产内核的内存是通过/proc/vmcore这个文件交给捕获内核的。为了生成它,用户工具在生产内核中分析出内存的使用和分布等情况,然后把这些信息综合起来生成一个ELF头文件保存起来。
捕获内核被引导时会被同时传递这个ELF文件头的地址,通过分析它,捕获内核就可以生成出/proc/vmcore。有了/proc/vmcore这个文件,捕获内核的ramdisk中的脚本就可以通过通常的文件读写和网络来实现各种策略了。
注意,在启动时,kdump保留了一定数量的重要的内存,为了计算系统需要的真正最小内存,加上kdump使用的内存数量,以决定真正的最小内存的需求。
x86,x86_64,arm,arm64,ppc,s390,sh
Kexec是基于kexec机制工作的,因此先了解一下Kexec。
kexec是一个快速启动机制,允许通过已经运行的内核的上下文启动一个Linux内核,不需要经过BIOS。(BIOS可能会消耗很多时间,特别是带有众多数量的外设的大型服务器。这种办法可以为经常启动机器的开发者节省很多时间。)
Kexec的实现包括2个组成部分:
** 一是内核空间的系统调用:kexec_load() **,负责在生产内核(production kernel 或 first kernel)启动时将捕获内核(capture kernel或sencond kernel)加载到指定地址。
** 二是用户空间的工具kexec-tools **,他将捕获内核的地址传递给生产内核,从而在系统崩溃的时候能够找到捕获内核的地址并运行。没有kexec就没有kdump。先有kexec实现了在一个内核中可以启动另一个内核,才让kdump有了用武之地。
kexec 在 kernel 里以一个系统调用 kexec_load()的形式提供给用户。这个系统调用主要用来把另一个内核和其 ramdisk 加载到当前内核中。在 kdump中,捕获内核只能使用事先预留的一小段内存。
生产内核的内存镜像会被以 /proc/vmcore 的形式提供给用户。这是一个 ELF格式的方件,它的头是由用户空间工具 kexec 生成并传递来的。在系统崩溃时,系统最后会调用machine_kexec()。这通常是一个硬件相关的函数。它会引导捕获内核,从而完成 kdump 的过程。
kdump 的很大一部分工作都是在用户空间内完成的。与 kexec相关的集中在一个叫kexec-tools的工具中的kexec程序中。
该程序主要是为调用 kexec_load()收集各种信息,然后调用之。这些信息主要包括 purgatory 的入口地址,还有一组由 struct kexec_segment描述的信息。

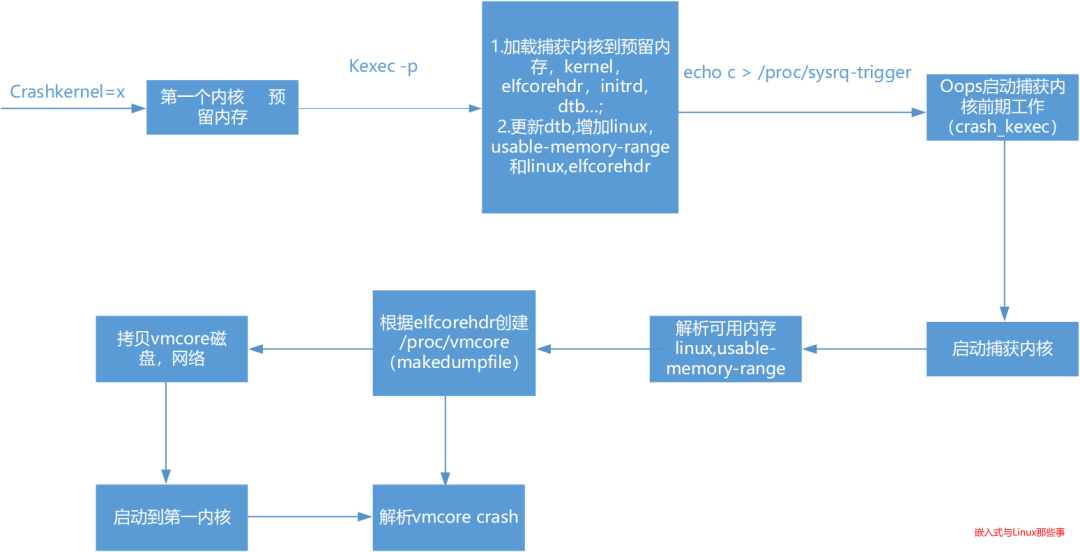
最后,附上一张图,看下kdump和kexec整个的工作流程。
修改内核中以下的配置宏,可在.config文件中修改,或者通过make menuconfig修改
CONFIG_KEXEC=y
CONFIG_CRASH_DUMP=y
CONFIG_PROC_VMCORE=y
CONFIG_PROC_KCORE=y
CONFIG_SYSFS=y
CONFIG_DEBUG_INFO=y
确认修改成功
root@firefly:/sys/kernel# ls /sys/kernel/ | grep kexec
kexec_crash_loaded
kexec_crash_size
kexec_loaded
root@firefly:~# ls /proc/ | grep kcore
kcore
如果出现proc/kcore,kexec相关节点说明配置生效了。
预留内存的设置一般有4种形式:
crashkernel=size[KMG][@offset[KMG]]
crashkernel=range1:size1[,range2:size,...][@offset]
举例
crashkernel=512M-2G:64M,2G-6G:256M,6G-8G:512M,8G-:768M
参数含义如下:
如果RAM大小小于512M,则不预留内存。
如果RAM大小为512M - 2G,则预留 64M。
如果RAM大小为2 - 6G,则预留 256M。
如果RAM大小大于8G,则预留768 M。
crashkernel=size[KMG],hign
crashkernel=size[KMG],low
在X86-64主机上一般是修改/etc/default/grup中的参数来配置及检查, 但是在嵌入式设备上因为是裁剪的系统,并没有grup这个文件。
但我们可以知道,配置grup文件的目的就是更改cmdline中的内容,那我们如何去更改cmdline的内容呢?提供以下几个思路:
这里我们选择在dts中修改。
vim kernel/arch/arm64/boot/dts/rockchip/rk3399-linux.dtsi
当前使用的设备RAM已经是4G,所以预留的是256M
root@firefly:~# free -m
total used free shared buff/cache available
Mem: 3583 194 3154 8 234 3351
Swap: 0 0 0

重新编译烧写内核,看到设备启动时,已经加入了启动参数。

查看启动参数是否生效
root@firefly:~# cat /proc/iomem | grep Crash
e5e00000-f5dfffff : Crash kernel
确认分配内存大小
root@firefly:~# cat /sys/kernel/kexec_crash_size
268435456
在某些情况下,我们需要正确评估预留内存的大小,主要从以下2个方面考虑。
/proc/iomem表示的是系统的物理内存布局, System RAM entry表示当前系统可用的预留内存。例如,我当前设备的内存为3.8G,预留800M内存也是足够的。
root@firefly:~# cat /proc/iomem | grep System
00200000-083fffff : System RAM
0a200000-f7ffffff : System RAM
http://kernel.org/pub/linux/utils/kernel/kexec/kexec-tools.tar.gz
tar xvpzf kexec-tools-2.0.26.tar.gz
LDFLAGS=-static ./configure ARCH=arm64 --build=x86_64-linux-gnu --host=aarch64-linux-gnu --target=aarch64-linux-gnu --without-xen
这里使用静态编译。
make
sbin/kexec 拷贝至rootfs /usr/sbin/中。root@firefly:~/kexec/sbin# kexec -v
kexec-tools 2.0.26
查看kexec参数。
root@firefly:~# kexec -h
kexec-tools 2.0.26
Usage: kexec [OPTION]... [kernel]
Directly reboot into a new kernel
-h, Print this help.
-v, --version Print the version of kexec.
-f, --force Force an immediate kexec,
don't call shutdown.
-i, --no-checks Fast reboot, no memory integrity checks.
-x, --no-ifdown Don't bring down network interfaces.
-y, --no-sync Don't sync filesystems before kexec.
-l, --load Load the new kernel into the
current kernel.
-p, --load-panic Load the new kernel for use on panic.
-u, --unload Unload the current kexec target kernel.
If capture kernel is being unloaded
specify -p with -u.
-e, --exec Execute a currently loaded kernel.
--exec-live-update Execute a currently loaded xen image after
storing the state required to live update.
-t, --type=TYPE Specify the new kernel is of this type.
--mem-min= Specify the lowest memory address to
load code into.
--mem-max= Specify the highest memory address to
load code into.
--reuseinitrd Reuse initrd from first boot.
--print-ckr-size Print crash kernel region size.
--load-preserve-context Load the new kernel and preserve
context of current kernel during kexec.
--load-jump-back-helper Load a helper image to jump back
to original kernel.
--load-live-update Load the new kernel to overwrite the
running kernel.
--entry= Specify jump back address.
(0 means it' s not jump back or
preserve context)
to original kernel.
-s, --kexec-file-syscall Use file based syscall for kexec operation
-c, --kexec-syscall Use the kexec_load syscall for for compatibility
with systems that don't support -s (default)
-a, --kexec-syscall-auto Use file based syscall for kexec and fall
back to the compatibility syscall when file based
syscall is not supported or the kernel did not
understand the image
-d, --debug Enable debugging to help spot a failure.
-S, --status Return 1 if the type (by default crash) is loaded,
0 if not.
Supported kernel file types and options:
vmlinux
An ARM64 ELF image, big or little endian.
Typically vmlinux or a stripped version of vmlinux.
Image
An ARM64 binary image, uncompressed, big or little endian.
Typically an Image file.
uImage
An ARM64 U-boot uImage file, compressed or not, big or little endian.
zImage
An ARM64 zImage, compressed, big or little endian.
Typically an Image.gz or Image.lzma file.
Architecture options:
--append=STRING Set the kernel command line to STRING.
--command-line=STRING Set the kernel command line to STRING.
--dtb=FILE Use FILE as the device tree blob.
--initrd=FILE Use FILE as the kernel initial ramdisk.
--serial=STRING Name of console used for purgatory printing. (e.g. ttyAMA0)
--ramdisk=FILE Use FILE as the kernel initial ramdisk.
--reuse-cmdline Use kernel command line from running system.
注意以下几个参数
-d: 执行kexec指令时会打印调试信息
-p: 将内核加载到预留内存中,panic时自动启动capture内核。
-l: 将内核加载到预留内存中
--append : capture内核的command line的内容
--t: 内核的类型,比如vmlinux,Image,uImage,zImage
--intrd:指定initrd
--reuseinitrd:复用第一个内核的initrd
--dtb:指定设备树
vmlinux,Image,uImage,zImage区别参考:secure boot (一)FIT Image
kexec --t vmlinux -p /root/var/vmlinux --ramdisk /root/var/ramdisk.img --append="storagemedia=emmc androidboot.storagemedia=emmc androidboot.mode=normal storagenode=sdhci@fe330000 androidboot.slot_suffix= androidboot.serialno=3fdce35e50641399 ro rootwait earlycon=uart8250,mmio32,0xff1a0000 swiotlb=1 console=ttyFIQ0 root=PARTLABEL=rootfs rootfstype=ext4 overlayroot=device:dev=PARTLABEL=userdata,fstype=ext4,mkfs=1 coherent_pool=1m systemd.gpt_auto=0 cgroup_enable=memory swapaccount=1 crashkernel=256M"
command line 可以通过 cat /proc/cmdline 查看。
root@firefly:~# cat /sys/kernel/kexec_crash_loaded
1
root@firefly:~# cat /sys/kernel/kexec_crash_size
268435456
root@firefly:~# cat /proc/sys/kernel/kexec_load_disabled
0
kexec_load_disabled:表示kexec_load系统调用是否被禁止,此系统调用用于kdump。当发生了一次kexec_load后,此值会自动设置为1。
在前面的准备工作完成后,如果触发系统崩溃,系统将重新引导到转储-捕获内核,触发点位于panic()、die()、die_nmi()和sysrq处理程序中。接下来我将通过 魔术键来触发系统panic。
echo 1 > /proc/sys/kernel/sysrq
echo c > /proc/sysrq-trigger
触发sysrq后,系统重启,串口打印出标志性 log:Bye!Starting crashdump kernel...。
[06:48:37]root@firefly:~# echo c > /proc/sysrq-trigger
[06:48:37][ 28.817657] sysrq: SysRq : Trigger a crash
[06:48:37][ 28.818172] Unable to handle kernel NULL pointer dereference at virtual address 00000000
[06:48:37][ 28.818894] pgd = ffffffc0deb9d000
[06:48:37][ 28.819326] [00000000] *pgd=0000000000000000, *pud=0000000000000000
....................
[06:48:37][ 28.950698] [] sysrq_handle_crash+0x24/0x30
[06:48:37][ 28.951218] [] __handle_sysrq+0xa0/0x14c
[06:48:37][ 28.951713] [] write_sysrq_trigger+0x5c/0x74
[06:48:37][ 28.952246] [] proc_reg_write+0xa8/0xcc
[06:48:37][ 28.952744] [] __vfs_write+0x48/0xe8
[06:48:37][ 28.953214] [] vfs_write+0xa8/0x15c
[06:48:37][ 28.953674] [] SyS_write+0x5c/0xb0
[06:48:37][ 28.954123] [] el0_svc_naked+0x24/0x28
[06:48:37][ 28.954609] Code: 52800020 b90a1c20 d5033e9f d2800001 (39000020)
[06:48:37][ 28.955167] SMP: stopping secondary CPUs
[06:48:37][ 28.955899] Starting crashdump kernel...
[06:48:37][ 28.956264] Bye!
[06:48:51][ 0.000000] Booting Linux on physical CPU 0x101
[06:48:51][ 0.000000] Initializing cgroup subsys cp 0.000000] Initializing cgrouys cpu
[06:48:51][ 0.000000] Initializys cpuacct
[06:48:51][ 0.000000] Linux version 4.4.194+ (zhongyi@ubunty: b1730021dd51a88c333473088af3a402491b4c23) (gcc version 6.3.1 20170404 (Linaro GCC 6.3-2017.05SMP Fri Mar 3 07:48:00 CST 2023
[06:48:51][ 0.000000] Boot CPU: AArch64 Processor [410fd082]
[06:48:51][ 0.000000] earlycon: Early serial console at MMIO32 0xff1a0000 (opti '')
[06:48:51][ 0.000000] bootconsole [uart0] enabled
[06:48:51][ 0.000000] cannot allocate crashkernel (size:0x10000000)
[06:48:51][ 0.000000] Reserving 1KB of memory at 0xf5dff000 for elfcorehdr
[06:48:51][ 0.000000] psci: probing for conduit method from DT.
[06:48:51][ 0.000000] psci: PSCIv1.0 detected in firmware.
[06:48:51][ 0.000000] psci: Using standard PSCI v0.2 function IDs
[06:48:52][ 0.000000] psci: Trusted OS migration not required
[06:48:52][ 0.000000] PERCPU: Embedded 21 pages/cpu @ffffffc035cf1000 s46440 r8192 d31384 u86016
[06:48:52][ 0.000000] Detected PIPT I-cache on CPU0
[06:48:52][ 0.000000] Built 1 zonelists in Zone order, mobility grouping on. Total pages: 64512
[06:48:52][ 0.000000] Kernel command line: storagemedia=emmc androidboot.storagemedia=emmc androidboot.mode=normal storagenode=sdhci@fe330000 androidboot.slot_suffix= androidboot.serialno=3fdce35e50641399 ro rootwait earlycon=uart8250,mmio32,0xff1a0000 swiotlb=1 console=ttyFIQ0 root=PARTLABEL=rootfs rootfstype=ext4 overlayroot=device:dev=PARTLABEL=userdata,fstype=ext4,mkfs=1 coherent_pool=1m systemd.gpt_auto=0 cgroup_enable=memory swapaccount=1 crashkernel=256M
[06:48:52][ 0.000000] PID hash table entries: 1024 (order: 1, 8192 bytes)
[06:48:52][ 0.000000] Dentry cache hash table entries: 32768 (order: 6, 262144 bytes)
[06:48:52][ 0.000000] Inode-cache hash table entries: 16384 (order: 5, 131072 bytes)
[06:48:52][ 0.000000] software IO TLB: mapped [mem 0xf5c51000-0xf5c91000] (0MB)
[06:48:52][ 0.000000] Memory: 208908K/262144K available (14782K kernel code, 2146K rwdata, 6988K rodata, 1216K init, 780K bss, 53236K reserved, 0K cma-reserved)
[06:48:52][ 0.000000] Virtual kernel memory layout:
[06:48:52][ 0.000000] modules : 0xffffff8000000000 - 0xffffff8008000000 ( 128 MB)
[06:48:52][ 0.000000] vmalloc : 0xffffff8008000000 - 0xffffffbdbfff0000 ( 246 GB)
[06:48:52][ 0.000000] .init : 0xffffff80095d0000 - 0xffffff8009700000 ( 1216 KB)
[06:48:52][ 0.000000] .text : 0xffffff8008080000 - 0xffffff8008ef0000 ( 14784 KB)
[06:48:52][ 0.000000] .rodata : 0xffffff8008ef0000 - 0xffffff80095d0000 ( 7040 KB)
[06:48:52][ 0.000000] .data : 0xffffff8009700000 - 0xffffff8009918808 ( 2147 KB)
[06:48:52][ 0.000000] vmemmap : 0xffffffbdc0000000 - 0xffffffbfc0000000 ( 8 GB maximum)
[06:48:52][ 0.000000] 0xffffffbdc0978000 - 0xffffffbdc0d78000 ( 4 MB actual)
[06:48:52][ 0.000000] fixed : 0xffffffbffe7fb000 - 0xffffffbffec00000 ( 4116 KB)
[06:48:52][ 0.000000] PCI I/O : 0xffffffbffee00000 - 0xffffffbfffe00000 ( 16 MB)
[06:48:52][ 0.000000] memory : 0xffffffc025e00000 - 0xffffffc035e00000 ( 256 MB)
[06:48:52][ 0.000000] SLUB: HWalign=64, Order=0-3, MinObjects=0, CPUs=6, Nodes=1
.........................................
[06:48:54][ 2.313003] rockchip-drm display-subsystem: bound ff940000.hdmi (ops dw_hdmi_rockchip_ops)
[06:48:54][ 2.314207] i2c i2c-10: of_i2c: modalias failure on /dp@fec00000/ports
[06:48:54][ 2.315077] rockchip-drm display-subsystem: bound fec00000.dp (ops cdn_dp_component_ops)
[06:48:54][ 2.315815] [drm] Supports vblank timestamp caching Rev 2 (21.10.2013).
[06:48:54][ 2.316404] [drm] No driver support for vblank timestamp query.
[06:48:54][ 2.317133] rockchip-drm display-subsystem: connector[HDMI-A-1] can't found any modes
.................................................
[06:48:58][ 6.180434] [dhd] dhd_conf_set_path_params : Final conf_path=/vendor/etc/firmware/config.txt
[06:48:58][ 6.313492] [dhd] dhd_conf_set_txglom_params : txglom_mode=multi-desc
[06:48:58][ 6.314159] [dhd] dhd_conf_set_txglom_params : txglomsize=36, deferred_tx_len=0
[06:48:58][ 6.314868] [dhd] dhd_conf_set_txglom_params : txinrx_thres=128d_txminmax=-1
[06:48:58][ 6.315529] [ddhd_conf_set_txglom_params : tx__offset=0, txctl_tmo_fix=300
[06:48:58][ 6.316245] [dhd] dhd_conf_get_disable_proptx : fw_proptx=1, disable_proptx=-1
[06:48:58][ 6.380768] [dhd] dhd_conf_map_country_list : CN/38
[06:48:58][ 6.381222] [dhd] dhd_conf_set_country : set country CN, revision 38
[06:48:58][ 6.385992] [dhd] dhd_conf_set_country : Country code: CN (CN/38)
[06:48:58][ OK ] Started Network Manager.
[06:48:58][ OK ] Reached target Network.
[06:48:58] Starting Permit User Sessions...
[06:48:58] Starting OpenBSD Secure Shell server...
[06:48:58][ OK ] Started Permit User Sessions.
[06:48:58] Starting Hold until boot process finishes up...
[06:48:58][ OK ] Started Hold until boot process finishes up.
[06:48:58][ OK ] Started Serial Getty on ttyFIQ0.
[06:48:58] Starting Set console scheme...
[06:48:58][ OK ] Started Set console scheme.
[06:48:58][ OK ] Created slice system-getty.slice.
[06:48:58][ OK ] Started Getty on tty1.
[06:48:58][ OK ] Reached target Login Prompts.
[06:48:58][ OK ] Started OpenBSD Secure Shell server.
[06:48:58][ OK ] Started Adbd for linux.
[06:48:58][ OK ] Started Setup rockchip platform environment.
[06:48:58] Starting Light Display Manager...
[06:48:58][ OK ] Reached target Multi-User System.
[06:48:59][ OK ] Started Light Display Manager.
[06:48:59][ OK ] Reached target Graphical Interface.
[06:48:59] Starting Update UTMP about System Runlevel Changes...
[06:48:59][ OK ] Started Update UTMP about System Runlevel Changes.
[06:48:59]
[06:48:59]Ubuntu 18.04.6 LTS firefly ttyFIQ0
[06:49:39]root@firefly:~# ls -al /proc/vmcore
[06:49:41]-r-------- 1 root root 3885387776 Mar 5 22:49 /proc/vmcore
[06:50:24]root@firefly:~# ls -al --block-size=m /proc/vmcore
系统正常启动后,就可以将/proc/vmcore文件拷贝出来在ubuntu上用crash工具分析。
diff --git a/arch/arm64/kernel/machine_kexec.c b/arch/arm64/kernel/machine_kexec.c
index aa9c94113700..3b0350d20e31 100644
--- a/arch/arm64/kernel/machine_kexec.c
+++ b/arch/arm64/kernel/machine_kexec.c
@@ -234,19 +234,12 @@ static void machine_kexec_mask_interrupts(void)
for_each_irq_desc(i, desc) {
struct irq_chip *chip;
- int ret;
chip = irq_desc_get_chip(desc);
if (!chip)
continue;
- /*
- * First try to remove the active state. If this
- * fails, try to EOI the interrupt.
- */
- ret = irq_set_irqchip_state(i, IRQCHIP_STATE_ACTIVE, false);
-
- if (ret && irqd_irq_inprogress(&desc->irq_data) &&
+ if (irqd_irq_inprogress(&desc->irq_data) &&
chip->irq_eoi)
chip->irq_eoi(&desc->irq_data);
还有一点需要说明的就是在 Ubuntu 默认仓库的 crash 不支持最新版本的 Linux 内核,需要更新到 7.2.5 版本才可以。
预留内存过大,设备没有足够的可用内存。默认会在0~4G预留内存。比如预留512M的空间,而在0~4G并没有可用的512M空间,就会导致预留失败。
kernel,kexec,makedumpfile,crash匹配问题,更新到最新的工具。
https://lore.kernel.org/lkml/ba0c6804-51a3-f36e-a67e-20ce84961451@arm.com/T/
https://www.cnblogs.com/shineshqw/articles/2359114.html
https://wiki.archlinux.org/title/Kdump
https://kaiwantech.wordpress.com/2017/07/13/setting-up-kdump-and-crash-for-arm-32-an-ongoing-saga/

