
作者 | 七七沫沫
小编 | 吃不饱
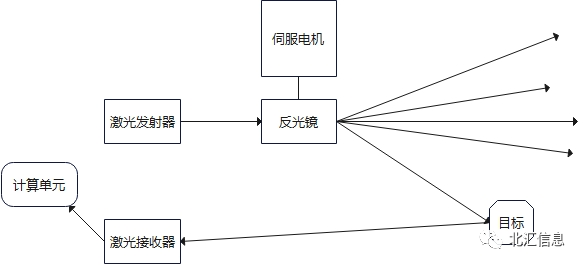
激光雷达的广泛应用
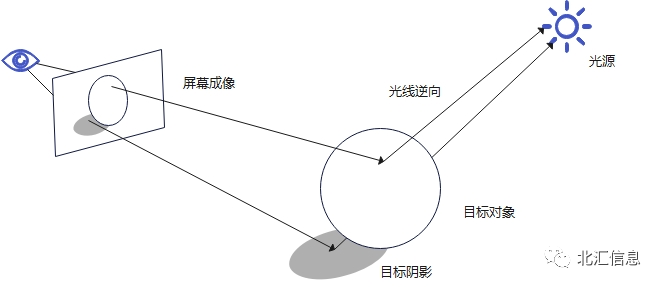
光线追踪
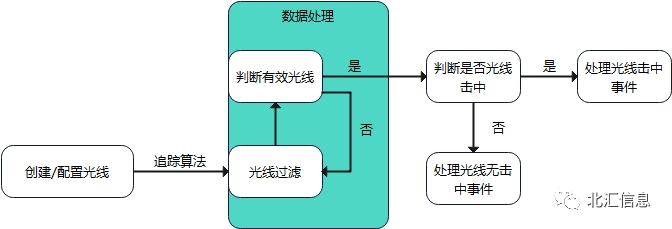
光线追踪步骤
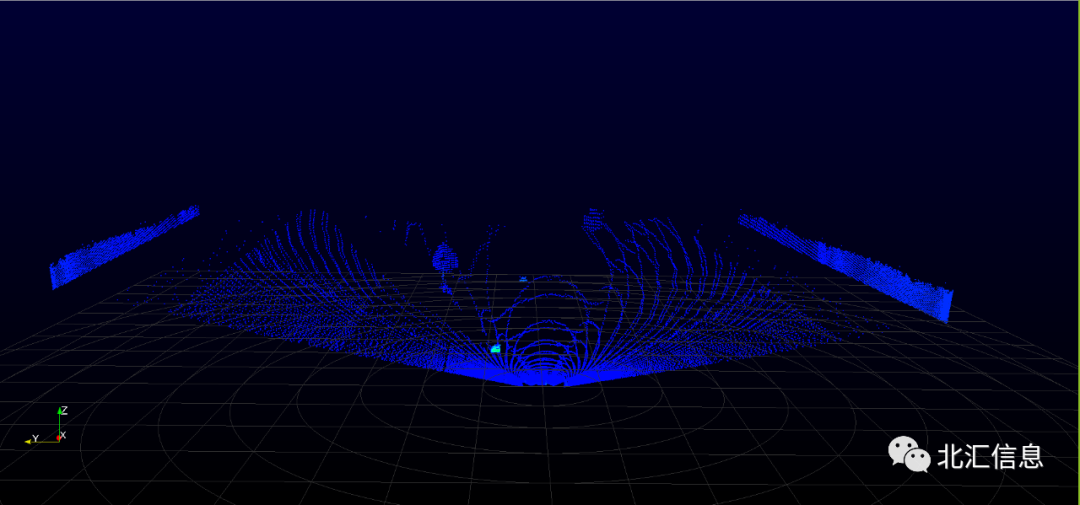
点云数据
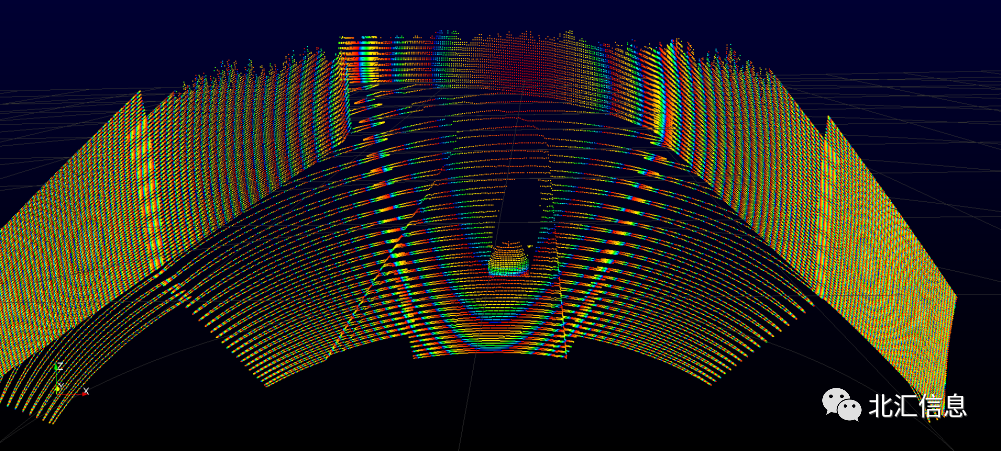
1.首先,在CANoe中建立接收的套接字和发送的套接字,此时可以拿到仿真的点云数据,并对数据进行解析以进一步进行后处理。
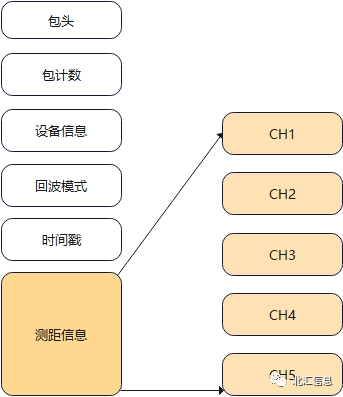
2.在解析完点云数据之后,可按照真实激光雷达的UDP组包协议来将解析完成的点云数据填充至相应的UDP结构内,同时将部分信息保存至系统变量,以便后期实现传感器数据相关的故障仿真等等。
3.最后,在将一帧的完整点云数据组包完成之后,通过建立的套接字来将数据发送至目标IP或激光雷达的上位机进行验证。

1.比如获取仿真的激光雷达点云数据、毫米波数据和视频流数据等,验证域控制器的感知融合算法;
2.使用激光雷达点云数据与其他仿真数据,通过CANoe将不同的总线协议信号一起注入给智驾域控制器,实现ACC、AEB等规控功能的验证;
3.通过CANoe直接处理的点云数据,也可实现对激光雷达进行通道故障、点云丢失、帧数据不同步等仿真,从而验证域控制器的功能安全机制。
往期推荐
▪️ C-V2X仿真测试之场景搭建
▪️ ADAS DV&PV试验测试台架的方案分享
▪️ 自动驾驶数据采集和分析平台--ADAS Logger
▪️ ADAS仿真测试-基于原始数据流的雷达感知测试


