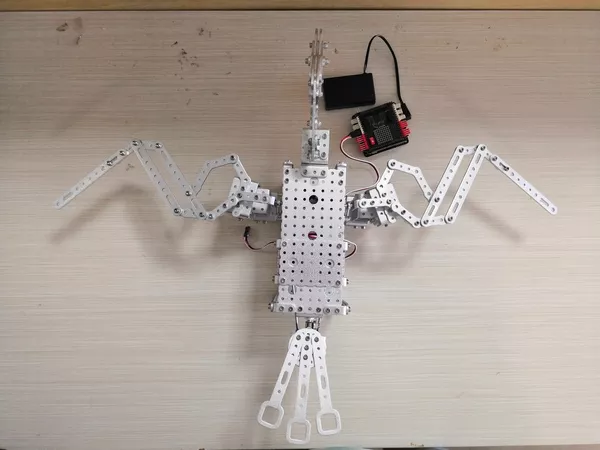
本文示例将实现R329样机机器鸟扇动翅膀的功能。
鸟类的翅膀主要由肩关节、肘关节、腕关节组成,本样机利用组合机构设计机器鸟的扑翼机构。

拥有两个关节的机器鸟扑翼机构结构图
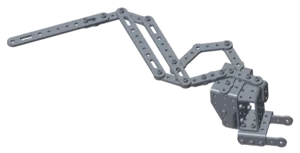
单侧翅膀
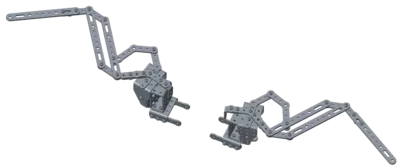
双翅
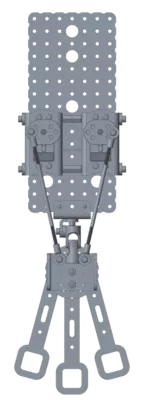
尾部
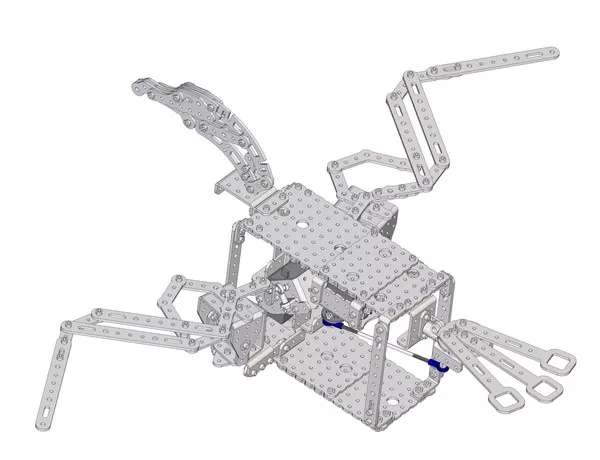
整机

电路连接:将舵机连接在Bigfish扩展板的D3端口。
编程环境:Arduino 1.8.19
下面提供一个机器鸟扇动翅膀的参考例程(Bird_Wing_Fly.ino),实验效果可参考演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-24 https://www.robotway.com/
------------------------------*/
#include
int _ABVAR_1_Subdivision_number = 0 ;
int _ABVAR_2_Flags = 0 ;
Servo servo_pin_3;
int _ABVAR_3_Servo3_Start = 0 ;
int _ABVAR_4_Servo3_End = 0 ;
int _ABVAR_5_Angle_Of_Each_Time = 0 ;
int _ABVAR_6_value1 = 0 ;
int _ABVAR_7_Angle_Of_Change = 0 ;
int _ABVAR_8_value2 = 0 ;
void Wing_Open();
void Wing_Close();
void setup()
{
servo_pin_3.attach(3);
_ABVAR_1_Subdivision_number = 14 ;
_ABVAR_2_Flags = 0 ;
servo_pin_3.write( 80 );
delay( 1000 );
}
void loop()
{
Wing_Close();
Wing_Open();
}
void Wing_Close()
{
_ABVAR_3_Servo3_Start = 10 ;
_ABVAR_4_Servo3_End = 80 ;
_ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ;
if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_6_value1= 1; _ABVAR_6_value1<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_6_value1++ ) { _ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ; servo_pin_3.write( _ABVAR_7_Angle_Of_Change ); _ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ; delay( 28 ); } } void Wing_Open() { _ABVAR_3_Servo3_Start = 80 ; _ABVAR_4_Servo3_End = 10 ; _ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ; if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_8_value2= 1; _ABVAR_8_value2<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_8_value2++ ) { _ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ; servo_pin_3.write( _ABVAR_7_Angle_Of_Change ); _ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ; delay( 65 ); } }
程序源代码及样机3D文件详见 机器鸟-扇动翅膀
