


随着汽车向电动化、智能化发展,其电子电气架构正从传统分布式架构向域集中式架构以及中央计算架构转变,汽车软件由面向信号的架构朝面向服务的软件架构升级。车用操作系统是汽车软件生态的重要基础,大力发展车用操作系统技术对保障我国智能汽车产业安全具有重要意义。基于此背景,本文对车用操作系统技术架构、典型产品以及发展现状进行了梳理,对比了国内外主流虚拟化技术产品、内核、中间件,并提出了车用操作系统发展趋势。
1 车用操作系统架构概述
车用操作系统与传感器、控制器、执行器等物理硬件共同组成车载基础软硬件平台,是实现智能驾驶、智能座舱、安全车控的基础。车用操作系统是汽车物理硬件与软件资源的管理控制程序,同时也是车载基础软件平台的基石,主要包括5个方面的管理功能,分别为:进程与处理机管理、作业管理、存储管理、设备管理、文件管理。在硬件层面,新能源汽车的硬件架构将向域集中式、中央计算架构转变,集中到有限的几个乃至一个算力强大的计算单元上,实现智能驾驶、智能座舱、安全车控等功能。在软件层面,汽车软件将由过去的嵌入式开发模式转变为全栈开发模式,作为连接和统一管理硬件、软件和用户的核心枢纽,完成资源调度[1]。车用操作系统为实现智能驾驶、智能座舱、安全车控等功能,须同步研发智能驾驶操作系统、智能座舱操作系统、安全车控操作系统及相应配套工具链,实现并行计算、分布管理,完成多个硬件之间的资源调度。未来,车用操作系统作为实现智能驾驶、交互娱乐、车路云协同等功能的软件载体,将成为汽车智能化发展的重要支撑。
智能驾驶和智能座舱操作系统按架构自下而上均可分为系统软件和功能软件。其中,系统软件按架构自下而上可以分为硬件抽象层、内核和中间件;功能软件可以分为自动驾驶通用框架模块、网联模块、云控模块等[2]。安全车控操作系统主要面向传统车辆控制,基于OSEK OS和Autosar CP构建,实现车身、动力、底盘系统等控制功能。车用操作系统架构如图1所示。
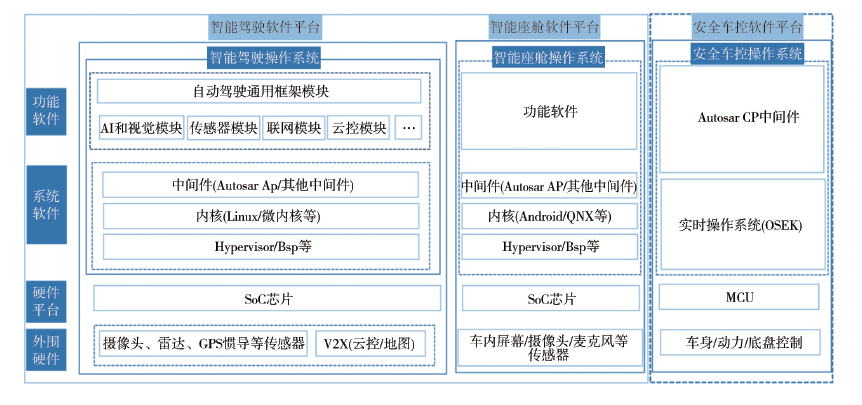 图1 车用操作系统架构
图1 车用操作系统架构
2 系统软件技术发展现状
2. 1 硬件抽象层
2. 1. 1 概念
硬件抽象层是内核与硬件之间的接口层,为操作系统提供虚拟硬件平台,实现操作系统与硬件解耦以及多硬件平台间的移植。虚拟硬件平台由VM(虚拟机)和Hypervisor(虚拟监视器)构成,操作系统在VM上运行,并通过Hypervisor进行调度。
VM是指通过软件模拟完整的硬件功能,实现操作系统在完全隔离环境中运行。虚拟机可以实现物理硬件的所有工作内容。
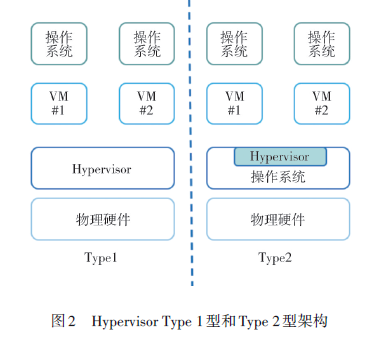
Hypervisor是指运行在物理硬件和虚拟机之间的中间层软件,协调访问物理设备和虚拟机,实现多个虚拟机共享一套物理硬件。Hypervisor分为Type1(裸机型)和Type 2(寄居型)。Type 1 型的Hypervisor直接运行在物理硬件之上,可直接访问物理硬件并管理所有硬件资源,在延时、安全性和效率上更胜一筹,但此类型Hypervisor需要硬件支持,移植难度大,开发成本也较高。Type 2型的Hypervisor
运行在某个操作系统之上,通过操作系统访问物理硬件,移植难度小,开发成本低,但存在延时较高的问题,且底层操作系统若出现问题将直接影响Hypervisor,因此安全性相对较弱[2]。Type 1和Type2架构如图2所示。
2. 1. 2 典型虚拟监视器
操作系统中,娱乐和智能交互等模块与仪表显示等模块对实时性、安全性、稳定性要求不同,需要在一颗芯片上运行多种操作系统。因此,目前主流Hypervisor方案选择Type 1型,保障操作系统之间互不干扰,提升操作系统安全性。典型虚拟监视器包括QNX Hypervisor、ACRN Hypervisor、MentorHypervisor等,均为Type 1型。各类Hypervisor对比如表1所示。

2. 1. 3 国内外虚拟监视器市场格局
近几年涌入车载Hypervisor领域的企业非常多,以国外企业为主,主要产品包括加拿大黑莓公司的QNX Hypervisor、英国XenSource 公司的XenHypervisor、日本松下旗下子公司的OpenSynergy、Linux 基金会的ACRN Hypervisor、美国MentorGraphics 公司的Mentor Hypervisor 等。其中,QNXHypervisor是目前唯一应用到量产车型且功能安全等级达到 ASIL-D级的产品,支持恩智浦、高通等头部厂商的芯片。同时,黑莓与博世等多家Tier 1厂商建立了合作伙伴关系,推广其Hypervisor产品。此外,高通在Snapdragon Ride自动驾驶软件堆栈中也选择了QNX Hypervisor 2. 0版本产品。
国内Hypervisor 发展相对落后,2017 年中科创达、诚迈科技入选黑莓VAI计划,作为合作伙伴可以使用黑莓的嵌入式技术,开发集成服务、安全关键型解决方案。阿里斑马智行已开发出虚拟机监控技术产品AliOS Hypervisor。中兴通讯自研的Hypervisor产品已实现量产装车应用。
2. 2 车用操作系统内核
内核作为操作系统的核心,管理系统的各种资源[3],提供内存管理、文件管理、CPU调度管理、输入输出管理等功能[4]。内核可以按照内核结构、实时性以及对内核改造程度3个维度进行分类:根据内核结构,分为微内核和宏内核;按照实时性,分为实时操作系统和分时操作系统;根据对内核改造程度,分为基础型、定制型和ROM型。
2. 2. 1 概念
(1) 微内核与宏内核
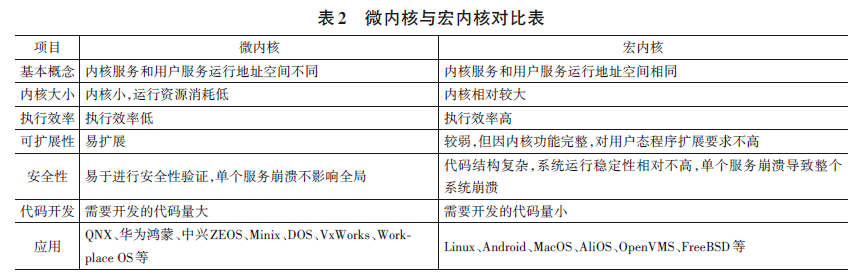
微内核的内核服务和用户服务在不同的地址空间中实现,应用程序和硬件的通信通过内核进程和内存管理实现。微内核稳定性较高,易于移植和扩展。由于用户服务和内核服务相互独立,内核服务将不会因用户服务的崩溃而受到影响。此外,微内核每添加一个功能,只须建立一个新的服务到用户空间当中,无须对内核空间作任何修改,但缺点是用户服务和内核服务之间交互流程较长,执行速度相对较慢。目前,微内核架构多用于仪表显示、智能网关、监控其他操作系统等安全等级要求较高的领域。
宏内核中的内核服务和用户服务在同一地址空间中,执行速度比微内核快,缺点在于当内核中的某个服务崩溃时,会影响其他内核服务,进而导致内核崩溃。此外,添加新的功能意味着内核中的各模块都需要做相应的修改,导致内核扩展性较弱。目前,在车用操作系统中,宏内核架构多用于智能驾驶、人车交互等算力要求较高的领域。微内核与宏内核特点如表2所示。
(2) 实时操作系统与分时操作系统
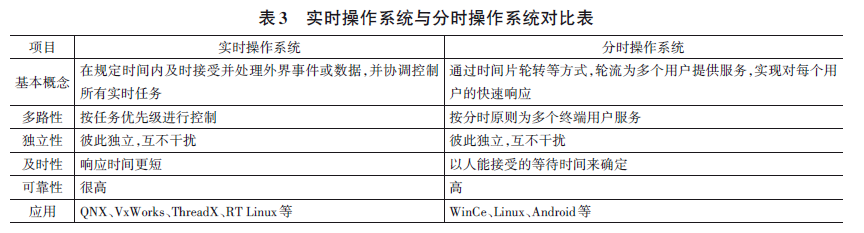
实时操作系统是指在规定时间内及时接受并处理外界事件或数据,并协调控制所有实时任务[5]。实时操作系统具有高实时性和高可靠性的特点,主要应用于汽车电控领域,实现车辆行驶过程中的车身控制,如动力控制和制动控制等。
分时操作系统是指通过时间片轮转等方式,轮流为多个用户提供服务,实现对每个用户的快速响应,并提供交互能力[5]。分时操作系统具有多路性、独立性、及时性、交互性的特点,可以缩短系统平均响应时间、提高吞吐率。在汽车领域,分时操作系统主要应用于人车交互、信息娱乐、导航、自动驾驶等领域。实时操作系统与分时操作系统的特点如表3所示。
(3) 基础型、定制型和ROM型
基础型操作系统仅包括系统内核、底层驱动等,实现系统最基本的功能,负责管理系统的内存、进程、驱动和网络系统等。
定制型操作系统是对基础操作系统进行深度定制化开发,如修改内核、硬件驱动、运行环境、应用程序框架等。一般由国内外头部车企或软件开发企业开发。内核改动成本高昂,技术水平要求高,需要有较强的研发实力。
ROM型操作系统不涉及系统内核修改,仅在基础型操作系统上进行有限定制化开发,一般只修改/更新操作系统自带的应用组件程序等。
2. 2. 2 典型系统内核
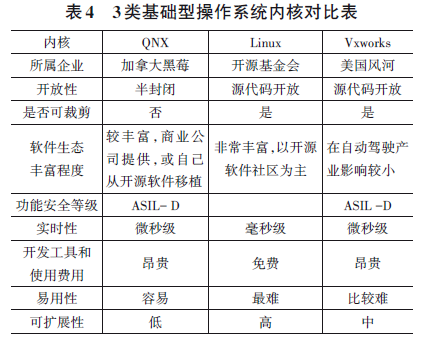
目前,主流基础型操作系统内核包括QNX、Linux、Vxworks等。但由于QNX代码封闭、Vxworks易用性和易扩展性较低,各软件开发企业大多选择开源Linux操作系统或微内核进行定制化开发的技术路线,实现智能驾驶或智能座舱的功能,如特斯拉基于Linux 内核定制开发的Version OS、谷歌基于Linux 内核定制开发并开放源代码的Android Automotive OS、华为基于微内核的鸿蒙操作系统。此外,由于ROM型操作系统开发难度较低,各整车企业往往选择该技术路线,如宝马BMW OS、小鹏Xmart OS、蔚来NIO OS。3类基础型操作系统内核对比如表4所示。
2. 2. 3 国内外系统内核市场格局
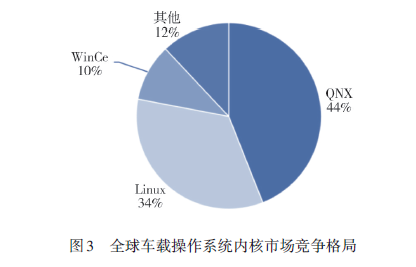
目前主流基础型操作系统均为国外企业或社区开发,国内虽然有华为、中兴通讯、阿里斑马智行等企业自研微内核架构的基础型操作系统,但普及率不高。根据CSDN数据,QNX市场占有率最高,覆盖全球主要汽车品牌,已有超过230种车型使用QNX。Linux市场占有率位居第二,2014年Linux基金会推出汽车级Linux,开源车载系统AGL(automotive grade Linux),丰田、戴姆勒、本田等知名车企均参与AGL项目开发。Vxworks主要应用于发动机控制领域,合作的品牌包括博世、宝马、福特、大众等。微软曾与许多整车企业合作,但因公司战略规划方向调整,其研发的车用操作系统WinCe已基本退出车用领域。全球车载操作系统内核市场竞争格局如图3所示。
对于整车企业而言,自研操作系统内核成本较高,大多基于已有内核进行ROM型开发。当前,自动驾驶初创公司和整车企业大多是在QNX、Linux等基础型内核之上进行开发,并自研中间件和应用软件。整车企业在选择操作系统内核时,会结合自身需求和研发能力,从安全性、可靠性、开放性、可扩展性、易用性及成本等方面权衡。例如,对实时性、功能安全要求更高的安全控制域,如安全气囊,整车企业会优先考虑实时性、安全性好的实时操作系统QNX等。而对应用生态丰富度要求高的座舱域,整车企业会在开放程度更高的Linux、Android等内核基础上打造座舱域操作系统。
目前较为成熟的操作系统为特斯拉Version OS和谷歌Android Automotive OS。其中,Version OS包含智能座舱、智能驾驶和安全车控3类操作系统,由特斯拉全栈自研,并可通过OTA进行快速修正与升级,提升用户体验。而Android Automotive OS 具有应用生态丰富、开源灵活、可移植性强的特点,有助于软件开发企业、整车企业快速切入车用智能座舱操作系统领域,建立车载软件生态。
国内企业中,华为鸿蒙、百度Apollo、阿里斑马智行AliOS等操作系统发展较为迅速,均已实现量产,其中鸿蒙操作系统已在比亚迪汉、问界M5、北汽极狐阿尔法等车型应用。Apollo操作系统已在奇瑞EXEED星途TX车型实现应用,并应用于百度自研的第五代L4级自动驾驶车型Apollo Moon中。阿里斑马智行AliOS已在上汽智己L7车型实现量产。上汽、长安、东风、比亚迪等整车企业也相继开展了深度定制智能驾驶操作系统/智能座舱操作系统的自研工作。中兴通讯、中汽创智等在智能驾驶操作系统、智能座舱操作系统、安全车控操作系统均有布局,其中,中兴通讯推出基于自研微内核和SafetyLinux的双内核智能驾驶操作系统解决方案,兼顾智能驾驶场景下功能安全和丰富生态支持要求。国内芯片企业地平线等企业基于自研芯片架构也开展了智能驾驶操作系统的自主研发。
2. 3 中间件
2. 3. 1 概念
中间件作为内核和功能软件之间的中间层软件,将内核提供的接口重新封装,并添加一些实用功能,为功能软件提供更好服务。由于汽车软件系统出现了多种操作系统并存的局面,导致系统的复杂性和开发成本剧增,为提高软件的管理性、移植性、裁剪性和质量,须重新定义一套架构,将内外部开发环境交互规则进行统一,帮助实现软硬件之间的解耦[6]。
2. 3. 2 典型中间件
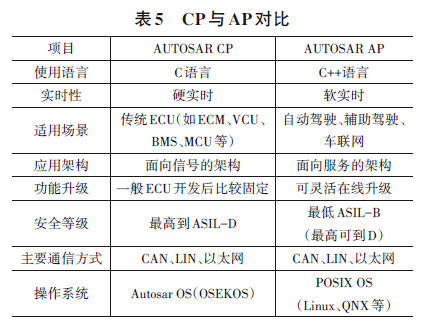
目前,主流中间件是Autosar汽车开放架构,由全球汽车制造商、零部件供应商以及各种研究、服务机构共同参与制定,拥有CP和AP两大平台[7]。CP架构是针对传统车辆控制OSEK标准的嵌入式系统的解决方案,主要应用在算力要求较低的场景中,如发动机控制等传统电子控制单元。AP架构是由CP架构演化而来,时延在毫秒级,主要应用在算力要求更高的场景中,如自动驾驶和信息娱乐等领域。Autosar作为一套标准,在实际应用中,Tier 1厂商会基于安全车控ECU模块中的MCU芯片,将OSEK OS作为Autosar CP平台的底层组件,构建安全车控操作系统,实现车身、动力、底盘系统等控制功能。Autosar CP与AP情况如表5所示。
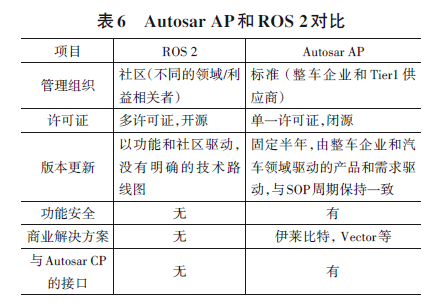
随着智能驾驶技术的不断发展,ROS 2作为能够支持Linux、RTOS等操作系统的实时系统,已逐渐应用于自动驾驶中间件中[8]。Autosar AP 与ROS 2对比如表6所示。
2. 3. 3 国内外中间件市场格局
目前中间件开发的参与者众多,多个标准并行。从竞争格局看,整车企业、传统Tier1厂商、平台供应商、汽车电子厂商及第三方软件供应商在中间件领域均有所布局。其中Autosar是目前最常见和最常用的中间件方案,如果想完全实现Autosar 系统功能,须购买德国维克多、易特驰和芬兰伊莱比特等Tier1 的Autosar 工具链,其中易特驰产品可兼容Autosar与ROS 2架构。
国内有多家企业从事Autosar中间件的开发,包括东软睿驰、经纬恒润、普华基础软件、华为、阿里斑马智行等。
3 功能软件技术发展现状
3. 1 概念
功能软件是面向智能驾驶核心共性需求形成的软件集合,支撑自动驾驶功能灵活敏捷开发,其模块包括自动驾驶通用框架、网联、云控等,与系统软件共同构成完整的智能驾驶操作系统[9]。功能软件具有弹性可扩展的特点,主要解决算法/组件复用、应用快速开发与迭代、软件系统集成、可视化开发等问题。
3. 2 典型功能软件
3. 2. 1 自动驾驶通用框架模块
自动驾驶通用框架模块是功能软件的核心,可调用网联、云控等功能软件子模块,支撑ADAS和自动驾驶应用进程。模块包含感知、定位、决策、控制等专用算法组件库,以及逻辑、数学等基础算法组件库。自动驾驶通用框架模块定义了核心、共性自动驾驶通用框架和数据流,包含共性模块的实现,并提供对外接口和服务,方便接入非共性或演进算法,促进快速迭代。
3. 2. 2 网联模块
网联模块通过实现网联协同感知、网联协同规划等功能,完善自动驾驶通用框架模块。网联数据通过V2X获得路侧数据、摄像头、智能信号灯、其他车辆等信息,结合单车传感器系统,进一步提高自动驾驶感知功能,从而增强自动驾驶操作系统的决策能力,最终实现无人驾驶。
3. 2. 3 云控模块
云控模块通过与云控基础平台交互,实现人车路云一体化。云控基础平台通过云计算和信息共享,为智能网联汽车及用户提供车辆运行、基础设施、交通环境等动态基础数据。云控模块一方面为云控基础平台提供其所需的数据支撑,另一方面通过中心云/边缘云进行云端感知、决策和规划,实现云-端分工协调。
3. 3 国内外功能软件市场格局
目前,可提供功能软件或相关功能模块的企业较多,竞争较为激烈,国内有国汽智控、德赛西威、地平线、中科创达、东软睿驰、映驰和零念,国外有英伟达、TTTech等。上述大部分企业仅提供部分说明文档及示例开发,缺少图形化软件开发器,开发难度较高,研发的功能软件仅提供部分模块功能,丰富程度较低。
4 国外企业车用操作系统发展情况
4. 1 整车企业
4. 1. 1 特斯拉
特斯拉研发智能驾驶操作系统、智能座舱操作系统、安全车控操作系统。在智能座舱操作系统方面,特斯拉Version OS是一款基于Linux 4. 4内核版本深度改造而成的封闭操作系统,支持PyTorch深度学习编程框架,基于Kafka开源流实时数据处理平台,可支持信息娱乐系统和驾驶辅助系统等[4]。为提高信息安全性,Version OS 使用了安全增强型Linux(SE Linux)内核模块,最大限度地保证系统安全。在智能驾驶操作系统方面,特斯拉基于自研的FSD 芯片,以Linux内核为基础,定制开发Autopilot智能驾驶操作系统,具有感知、决策规划和控制等功能,拥有48个独立的神经网络,可进行多维度数据处理,且具备强大的OTA升级能力。该架构基于海量的数据驱动,可实现数据采集、算法模型生成、算法模型分布式训练、算法模型车端部署等功能,可将算法模型与人类行驶行为对比,实现闭环反馈,使系统性能不断迭代优化。在安全车控操作系统方面,特斯拉参考Autosar CP标准自研。
4. 1. 2 宝马
宝马主要研发智能座舱操作系统,其BMW OS是一款基于QNX 自研的ROM 型智能座舱操作系统,目前已经升级至BMW OS 8版本,支持5G通信标准、OTA和UWB超宽带技术的无钥匙汽车门禁,为用户提供基于云端计算的新导航系统、车窗语音控制等一系列全新功能。此外,BMW OS和数字化仪表盘、中控曲面屏等硬件设备组成的iDrive平台,可实现转向回馈力度、悬架刚度、电子模拟的发动机轰鸣声等10 个挡位调节,增强驾驶体验感和操控性。
4. 2 Tier1 企业
4. 2. 1 Vector
Vector主要研发安全车控、智能驾驶操作系统,是Autosar组织的成员,可提供遵循Autosar CP与AP规范的多款中间件方案,功能安全等级达到ASIL-D级。Vector提供的产品以标准组件为主,定制组件为辅。与其他Tier1 相比,其产品是以源码形式交付,相比于业界流行的“黑盒交付”,更受整车企业青睐。其研发的MICROSAR Adaptive操作系统是基于Autosar AP 平台搭建,为中间件层提供实时运行环境和开发工具,整车企业在架构设计时,可以使用PREEvision Adaptive Autosar Explore(协同开发平台)进行服务设计、服务定义、服务实现、软件架构设计、网络拓扑设计、SOME/IP通信设计。
4. 2. 2 易特驰
易特驰主要研发安全车控、智能驾驶操作系统,是Autosar组织成员,可提供遵循Autosar CP与AP规范的多款中间件方案,包括RTA-CAR、OS Port、Iceoryx等,但交付方式主要以“黑盒交付”为主。其中,Iceoryx是一款适用于各种操作系统的进程间通信(IPC)的高级别自动驾驶中间件产品,目前已支持Linux、Mac OS 和QNX,可兼容ROS2和Autosar AP接口,满足当前最常见的基于SOME/IP 通信和基于DoIP 诊断的应用场景,满足不同开发阶段的需求。
4. 3 互联网企业
4. 3. 1 谷歌
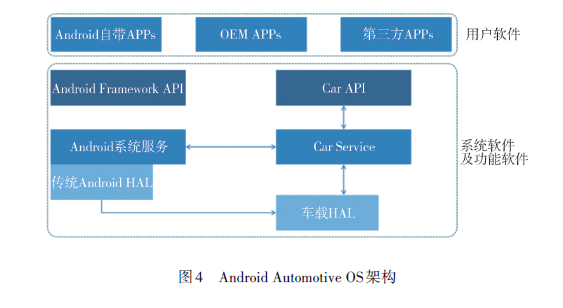
谷歌主要研发智能座舱操作系统,其Android Automotive OS是一款基于Linux内核的智能座舱操作系统,具有系统平均响应时间短、吞吐率高、可处理多个用户请求及服务等优点。此外,Android Automotive增加了AppCar(OEM和第三方开发的应用)、Car API(汽车App特有的接口)、Car Service(系统中与车相关的服务)、Vehicle Network Service(汽车的网络服务)、Vehicle HAL(汽车的硬件抽象层描述)等模块,具备查看和控制整车其它子系统的能力[10]。Android Automotive架构如图4所示。
4. 3. 2 黑莓
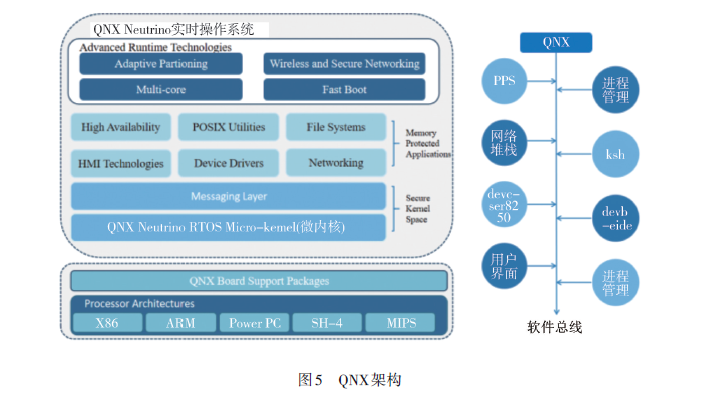
黑莓QNX是一款以安全稳定和实时性著称的微内核、非开源的实时操作系统,且文件大小远小于传统操作系统。QNX的应用程序之间采用同步消息传递的进程间通信模式来访问所有驱动程序和操作系统服务。在这一模式下,QNX内核可以自动协调通信程序,开发者无须在每个进程中手动编码和调试复杂的同步服务。此外,通过将操作系统划分为可以单独开发和维护的基础模块,QNX一定程度上实现了操作系统的模块化和简单化[10]。QNX 架构如图5所示。
黑莓研发的智能座舱操作系统主要聚焦于对实时性和安全性有较高要求的仪表显示等模块。
4. 3. 3 Linux开源基金会
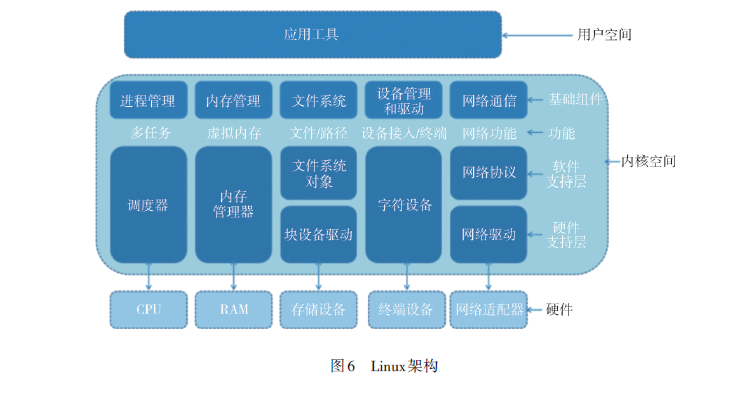
Linux是一款以灵活开源且性能稳定著称的宏内核、嵌入式的分时操作系统,主要应用于智能驾驶领域。其核心在于网络化架构,支持多用户、多任务、多线程、多CPU的同时,保障系统的稳定性。其内核由进程管理、内存管理、文件系统、设备管理和驱动以及网络通信等5部分组成。其中,进程管理是最重要的子系统,实现对CPU 的访问控制。此外,硬盘、软盘、以太网卡等驱动和其他功能可以编译进内核,也可以在运行时加载。因此,Linux的内核设计方式提供了一种高度模块化的嵌入式系统构建方法,可以通过定制驱动程序和应用程序的组合来提供附加功能[10]。Linux架构如图6所示。
4. 4 芯片企业
4. 4. 1 英伟达
英伟达基于自研芯片,开发出NVIDIA DRIVE智能驾驶操作系统,为开发者提供自动驾驶所需的所有构建模块和算法堆栈。该软件有助于开发者更高效地构建和部署各种先进的智能驾驶应用程序,包括感知、定位和地图绘制、计划和控制、驾驶员监控和自然语言处理。其中,智能驾驶操作系统的功能层软件涵盖开发高级别自动驾驶功能的处理模块、工具和框架,如DNN算法加速库、Calibration标定工具、DriveCore 核心库,帮助下游开发者实现易于深度定制开发的功能软件。
4. 4. 2 Mobileye
英特尔旗下的Mobileye基于自研芯片,开发智能驾驶操作系统,将芯片和智能驾驶操作系统紧耦合,快速为整车厂提供智能驾驶解决方案。同时,Mobileye发布面向芯片的软件集成化工具EyeQ Kit,该工具充分利用芯片的高能效架构,提供完整的SDK 包(软件开发工具包)以及OpenCL 环境和TensorFlow(基于深度神经网络的开源软件库)来支持开放计算,允许整车厂在EyeQ上部署算法,并提供人机接口工具。
5 国产车用操作系统发展情况及主要问题
5. 1 国产车用操作系统发展情况
总体来说,与国外相比,我国车用操作系统发展相对较慢,技术基础薄弱。在安全车控操作系统方面,以Vector、博世、采埃孚为主的国际头部Tier1厂商占据绝大部分市场,处于领先水平[11]。国内虽然有东软睿驰、经纬恒润等厂商,但产品稳定性以及相应工具链的成熟度仍与国外有一定差距。在智能驾驶操作系统方面,整车企业、软件开发企业、芯片企业已开展相关研究,大多基于Linux内核的定制型操作系统开发,实现大算力的自动驾驶决策功能。虽然技术路径较为一致,但由于国内厂商存在对Linux内核理解不深入、操作系统装车量不足、标准和规范尚未统一等问题,导致国内智能驾驶操作系统发展较为缓慢。在智能座舱操作系统方面,由于Android在座舱娱乐领域的生态较为完善,研发成本较低,使得Android成为诸多企业的首选。此外,国内企业倾向研发微内核操作系统,实现数字仪表显示等实时性、安全性要求较高的功能,抢占QNX操作系统市场,但尚未普及。
5. 2 国产车用操作系统的主要问题
5. 2. 1 关键核心技术基础薄弱
一是在燃油车时代,产业模式主要是整车企业与Tier1合作,博世、大陆、采埃孚等国际零部件巨头可提供完整的软硬件解决方案,整车企业对自主操作系统的认知度和使用黏性不足,导致国产车用操作系统发展相对较慢。随着汽车进入智能化时代,产业模式发生变革,英伟达、谷歌等Tier2厂商直接与整车企业合作,进一步压缩了国产车用操作系统的发展空间,叠加整车企业对国产操作系统持续迭代发展的信心不足等不利因素,导致国产车用操作系统装车率较低。
二是相较计算机和智能手机操作系统,车用操作系统对实时性、安全性、稳定性的要求更高。但我国在车用操作系统领域自主创新能力不足,现有大部分车用操作系统大都基于QNX、Linux、Android系统的二次开发,对内核技术和代码的理解以及多操作系统融合能力不足,软硬件兼容适配方面技术薄弱,难以满足车用操作系统较高的实时性、安全性和稳定性要求。
三是我国车用操作系统开发所需要的工具链、安全标准体系、程序库等大多被国外公司垄断。工具链基本采用易特驰、Vector等国外企业产品,采购及使用成本较高。东软睿驰、经纬恒润、普华基础软件等国内公司自主研发的工具链虽然已用于整车企业,但基本是作为国外产品的配套软件,仍处于发展初级阶段,尚不具备独立开发全套工具链的能力。
5. 2. 2 标准和规范体系尚不健全
我国车用操作系统相关的测试标准、规范缺乏系统性和完整性,尚不成体系[12]。在智能驾驶操作系统方面,存在统一标准尚未建立、应用软件接口协议不规范等问题,在一定程度上制约了智能驾驶的发展[13]。在安全标准规范方面,功能安全和信息安全规范大都来自国外,自主研发的标准较少,尚未建立符合我国国情的车用操作系统规范,也缺乏相关的评价标准和法律保障。
5. 2. 3 基础科学建设和人才支撑不足
车用操作系统需要计算机软件、信息通信、车辆控制、数据安全、信息安全等多学科交叉融合作为支撑。但我国车用操作系统产业和相关学科人才短缺,一方面国内计算机专业教育偏重于计算机工程、软件工程和软件应用,与车辆工程、数据安全等学科融合不足;另一方面由于国内车用操作系统相关的基础软件研发投入不足,行业前景存在不确定性,导致高端领军人才匮乏。
6 发展国产车用操作系统的重要性
开发国产车用操作系统对发展汽车产业具有战略意义。我国新能源汽车产业已形成一定的领先优势,当前面临芯片设计制造能力不足和车用操作系统技术基础薄弱的双重挑战。政府和企业已开始重视缺“芯”问题,由于我国操作系统起步较晚,技术基础薄弱,叠加行业发展经验和合力不足等不利因素,导致我国车用操作系统发展缓慢。为推动我国智能汽车产业高质量发展,避免出现新的“卡脖子”问题,须大力发展并建立自主可控的车用操作系统,提升车用操作系统的国际话语权,使新能源汽车产业真正成为具有全球竞争力的产业。
车用操作系统是汽车向智能化、网联化发展的基础,是必须掌握的关键核心技术。车辆正由单纯的交通工具向智能移动终端转变,汽车电子电气架构正在由分布式向域集中式、中央计算架构持续演进,汽车电子产业链和技术链将面临重构[9]。汽车电子底层硬件不再仅仅提供简单的逻辑计算,而是须提供更为强大的算力支持,软件也不再是基于某一固定硬件开发,而是要具备可移植、可迭代和可拓展等特性。智能网联汽车需要一个安全可靠、实时运行、并行计算和分布管理的操作系统,能够支持人工智能、物联网、高算力等新一代信息技术应用。
开发国产车用操作系统有助于保障产业安全。在智能网联汽车全产业链上的一些关键技术,比如操作系统、车用高性能芯片和车用传感器大量依赖国外公司产品,很大程度影响到我国汽车产业的产业链安全,只有基于自主开发,才不会受制于人。同时,如果没有安全可靠、实时运行的操作系统,就很容易出现信息泄露与篡改,导致系统产生错误判断,可能会引发车辆安全事故[14]。而且智能汽车在使用过程中将产生大量的数据,如不能对这些数据进行有效管理,将会面临极大的数据安全和信息安全,存在重大国家安全隐患。
开发国产车用操作系统将带来巨大经济效益。根据麦肯锡数据显示,2020年全球车用操作系统的市场规模达到238亿美元,预计2025年将达到362亿美元,2030年将达到469亿美元。我国车用操作系统同样也将迎来发展良机,2021 年市场规模为94. 3亿元,预计2023年有望突破185亿元。
7 车用操作系统发展趋势
伴随汽车电子电气架构演进,车用操作系统从多系统向少系统、从单核向多核分布式架构发展。在分布式阶段,整车存在多类型控制系统,如发动机电控系统EMS、自动变速器控制单元TCU、车身电子稳定系统ESP、电池管理系统BMS等,均需要单独的嵌入式操作系统,只为实现既定功能负责,不考虑与其他ECU信息交换。在域集中阶段,功能相近ECU进行融合,基于域控制器,操作系统向少数集成化发展,形成智能驾驶操作系统、智能座舱操作系统、安全车控操作系统;未来发展到中央集中式阶段,硬件集中化也会带来操作系统功能集成、数量减少,形成统一的整车智能操作系统。从内核数量及架构特点变化来看,从传统汽车到智能汽车,计算资源管理和计算模型发生了巨大变化,主控芯片向异构式SoC芯片升级,在AI 单元、计算单元和控制单元上,由Hypervisor虚拟化分区,各不同安全等级内核系统运行在各自分区内,每个单元完成各自功能,操作系统由单一内核向多内核发展,并将形成多核分布式、异构融合的架构。
7. 1 车用操作系统产业发展趋势
目前,行业的总体认识是车用操作系统的整体架构朝着横向集中和纵向分层的方向发展,主要有“深度耦合,软硬绑定”和“分层解耦、开放共用”两种模式。
前者主要由特斯拉、大众、蔚来、理想等整车企业采用,采用内嵌Version OS的FSD芯片、内嵌QNX的英伟达芯片、内嵌Android 和QNX 的高通芯片。该模式的优势是初期软硬一体开发效率高,直接面向汽车产品需求迭代快,但存在研发投入大、系统封闭难以形成统一标准和生态、技术迭代的可持续性不足等问题。
后者主要由软件开发企业采用,如阿里斑马智行、普华基础软件等。该模式在能够广泛适配各类型芯片的同时,可保证操作系统的独立演进。分层解耦的模块化开发可支持整车企业灵活地适配中间件及个性化上层应用。开放共用的模式便于构建行业标准、降低行业整体成本,帮助整车企业更高效地复用和积累已有的自研软件应用,实现整车软件的安全可控,但存在发展初期规模效应不足、操作系统生态单薄、操作系统与芯片软硬协同效率较低等问题。
7. 2 车用操作系统在各功能域的架构方案以及发展趋势
新能源汽车中,最常见3 个功能域:车辆控制域、智能驾驶域和智能座舱域。车辆控制域主要涉及车辆的各类基础传感器,如温度传感器、基础执行器等。车辆控制域对算力要求较低,但对功能安全要求较高,须达到ASIL-D级,因此车辆控制域的控制器以低算力SoC或MCU为主,搭载高功能安全等级的实时操作系统。智能驾驶域主要负责摄像头、激光雷达、毫米波雷达等传感器感知环境,并决策控制车辆行驶。智能驾驶域一般使用高AI 算力的SoC,搭载微内核架构的RTOS和安全增强型Linux。智能座舱域主要负责人机交互,涉及从各种传感器感知驾驶员及乘客的意图,并给予及时反馈。智能座舱域一般使用高CPU/GPU 算力的SoC,使用Hypervisor进行资源隔离,运行多个程序,分别控制仪表,中控屏等。未来随着电子电气架构的演进,智能座舱、智能驾驶将开始融合,基于Hypervisor的软硬隔离,实现不同功能安全等级要求的功能域承载不同形态的操作系统(实时操作系统/Linux),并能够在线升级,构建最佳用户体验的软硬件架构。
7. 3 Hypervisor 发展趋势
未来,车载计算基础平台的硬件算力、存储能力、通信能力将得到极大提升,同时上层应用也日益丰富且复杂。在此背景下,虚拟化技术将成为车载计算基础平台中非常重要且不可或缺的基础软件。综合来看,车用Hypervisor的发展有以下趋势。一是高功能安全、高信息安全、高确定性、高性能的硬件资源实现分区隔离。由于软硬系统的复杂度快速上升,原本在多个ECU中实现的多个功能被整合到域控制器或中央计算平台上,导致软件系统更为复杂、出错概率增加、可靠性下降,而高功能安全、高信息安全、硬实时硬件资源分区隔离的Hypervisor可以在不影响原有系统性能的基础上,为解决上述挑战带来坚实的基础支撑。二是硬件资源的高效、弹性共享。复杂的应用系统要求操作系统能够更有效地利用硬件资源,动态资源的分配可以在复杂应用需求环境下充分利用硬件资源的潜能。三是高安全、高性能的跨域通信。在分区隔离以及高效弹性共享的基础上,高安全、高性能的分区软件系统的跨域通信可提高整个软硬件系统的运行效率,并保障跨域通信的功能安全和信息安全。
7. 4 内核发展趋势
车用操作系统内核面临支持以自动驾驶为代表的AI应用生态、负载软硬件环境下的高功能安全和高信息安全保障、车用环境下高安全/高性能/实时性/确定性/稳定性的综合优化等方面的挑战。因此,车用操作系统内核须着力优化高确定性/硬实时中断处理能力,支持抢占式调度,提供确定性的中断延迟和调度延迟,加强功能安全和信息安全,并实现高效自适应分区调度,兼容支持国际标准 POSIX 以及行业事实标准(例如 Linux 自定义部分)的应用接口,提供良好应用生态支持。
7. 5 中间件发展趋势
因汽车软件架构正逐步由面向信号的架构朝SOA架构升级,中间件的未来发展有以下趋势:一是提供SOA服务框架,将复杂系统分解成多个组件,以低耦合的方式集成,并支持车路云一体化的跨域算力融合与分布式通信;二是屏蔽底层异构硬件,在统一的架构下向上提供统一的接口,使开发者专注于应用开发,实现功能软件的移植迭代;三是支持跨核、跨芯片、跨域、跨系统的通信场景,支持 DDS(分布式实时通信)、SOME/IP(通信协议)以及车载以太网/TSN等新型通信技术;四是提供异构确定性调度框架,支持以时间驱动、数据驱动等多种编程范式,有序地安排对异构芯片的资源需求,保障关键任务执行确定性的同时,最大化利用系统资源。
7. 6 功能软件发展趋势
功能软件正逐步朝着模块化、组件化和服务化方向发展。在功能软件成为系统模块之前,各垂直应用往往直接基于系统底层开发,实现单一功能,不同应用之间能力无法复用,开发难度大,资源开销大。随着功能软件层被抽象出来,将成为面向服务的标准系统组件,可实现节省系统资源的同时,极大降低应用开发的成本开销。一方面,基于中间件和SOA服务架构,功能软件可完成自动驾驶算法应用的数据流和控制流框架搭建,对接不同的智驾算法模块,协同传感器输入、多模感知、预测、规划等不同的环节,实现算法流程注入、安全监控和状态管理机制;另一方面,功能软件通过构建地图服务、定位服务和数据引擎等体系,建立智能驾驶基础服务体系。
操作系统是智能网联汽车复杂计算和协同控制的技术基石,已成为汽车行业的重要技术发展方向。我国应立足于产学研合作攻关,以开源、开放、共享、协同的开发模式聚集企业、高校院所和用户的力量,加速信息技术和汽车产业的融合,推进操作系统的迭代发展,加快实现操作系统中国方案的落地,推动车路云一体化建设和智能网联汽车产业发展。
参考文献
[ 1] 头豹研究院.2022年中国新能源汽车产业系列研究报告,车载计算平台,智能驾驶落地关键支撑[EB/OL].头豹研究,2022.https://www.leadleo.com/report/details?id=63059828ad61fd65bf1c427e.Head Leopard Research Institute.2022 China new energy automo⁃bile industry series research report, on-board computing plat⁃form, intelligent driving landing key support[EB/OL]. HeadLeopard Study, 2022.https://www.leadleo.com/report/detailsid=63059828ad61fd65bf1c427e.
[ 2] 中国汽车工业协会、中国汽车芯片产业创新战略联盟、AU⁃TOSEMO.中国汽车基础软件发展白皮书3.0[R].2022.China Association of Automobile Manufacturers, China Automo⁃tive Chip Industry Innovation Strategic Alliance, AUTOSEMO.China automotive basic software development white paper 3.0[R].2022.
[ 3] 雷品源. 面向多核环境的微内核操作系统研究与实现[D]. 成都:电子科技大学,2021.LEI Pinyuan. Research and implementation of microkernel operat⁃ing system for multi-core enviroment[D]. Chengdu:University ofElectronic Science and Technology of China,2021.
[ 4] 李鲁苗,周玮.全球车用操作系统发展现状[J].汽车纵横,2022,130(1):39-42.LI Lumiao, ZHOU Wei. Global development status of automotiveoperating systems[J]. AutoReview,2022,130(1):39-42.
[ 5] 谢春生,彭钢.计算机行业操作系统:汽车软件化的起点[EB/OL].华泰证券,2022.https://www.fxbaogao.com/detail/3192448.XIE Chunsheng, PENG Gang. Computer industry operating sys⁃tem:the starting point of automotive software [EB/OL]. HuataiSecurities。2022.https://www.fxbaogao.com/detail/3192448.
[ 6] 魏学哲,戴海峰,孙泽昌.汽车嵌入式系统开发方法、体系架构和流程[J].同济大学学报(自然科学版),2012,40(7):1064-1070.WEI Xuezhe, DAI Haifeng, SUN Zechang. Development meth⁃ods, architecture, and processes for automotive embedded sys⁃tems[J].Journal of Tongji University(Natural Science),2012,40(7):1064-1070.
[ 7] 汽标委智能网联汽车分标委.车控操作系统总体技术要求研究报告[EB/OL].全国汽车标准化委员会,2022. http://www.cat⁃arc.org.cn/wl_ziliaoxiazai_list/2231.Intelligent Connected Vehicle Sub-committee of National Techni⁃cal Committee of Auto Standardization. Research report on overalltechnical requirements of vehicle control operating system[EB/OL]. National Technical Committee of Auto Standardization,2022. http://www.catarc.org.cn/wl_ziliaoxiazai_list/2231.
[ 8] 浦俊懿.智能汽车深度系列之二:车载操作系统和中间件带来的机遇[EB/OL].东方证券,2022.https://www.fxbaogao.com/de⁃tail/3102380.PU Junyi. Intelligent vehicles in depth series II:opportunitiespresented by on-board operating systems and middleware [EB/OL]. Orient Securities, 2022. https://www.fxbaogao.com/detail/3102380.
[ 9] 中国软件评测中心.车载智能计算基础平台参考架构1.0[J].智能网联汽车,2019,5(4):85-94.China Software Testing Center.Reference architecture for vehicleintelligent computing basic platform 1.0[J]. Intelligent ConnectedVehicles,2019, 5(4):85-94.
[ 10] 头豹研究院.2022年中国新能源汽车行业系列研究—车载OS博弈,“兵家必争”:底层篇[EB/OL]. 头豹研究.https://www.leadleo.com/report/details?id=63059828ad61fd65bf1c427e.Head Leopard Research Institute.A series of research on China'snew-energy automobile industry in 2022 -the game of vehiclemountedOS, "the battle of the warriors" :the bottom chapter[EB/OL]. Head Leopard Study.https://www.leadleo.com/report/details?id=63059828ad61fd65bf1c427e.
[ 11] 迈向生态共建的车用操作系统之路[EB/OL].德勤咨询,2022.https://www.fxbaogao.com/detail/3452949.Vehicle operating system path towards ecological building[EB/OL].Deloitte Consulting, 2022. https://www.fxbaogao.com/detail/3452949.
[ 12] 赵世佳,徐可,宋娟,等.我国智能网联汽车操作系统发展的实施策略[J].科技管理研究,2020,40(9):107-111.ZHAO Shijia, XU Ke, SONG Juan, et al. Implementation strate⁃gies for the development of intelligent connected vehicle operatingsystems in China[J]. Science and Technology Management Re⁃search,2020,40( 9):107-111.
[ 13] 潘妍,张也,周瑞坤,等.我国智能网联汽车操作系统研究[J].电子元器件与信息技术,2022,6(5):142-146.PAN Yan, ZHANG Ye, ZHOU Ruikun, et al. Research on theoperating system of intelligent connected vehicles in China [J].Electronic Components and Information Technology, 2022,6(5):142-146.
[ 14] 张真齐.成立汽车操作系统“国家队”刻不容缓[N].中国青年报,2021-03-11(12).ZHANG Zhenqi. Establishing the "national team" of automotiveoperating systems is urgent[N]. China Youth Daily, 2021-03-11( 12).
END
