EVM是什么?
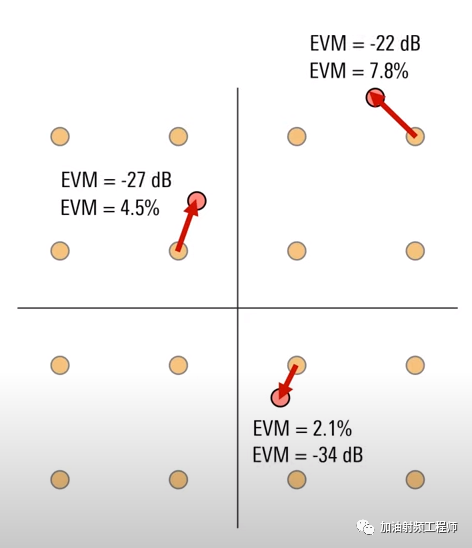
在星座图中,会有一个理想的点,然后还有一个实测的点。
就是一个是打算在哪,另一个是实际在哪。
再换句话说,就是一个是理想,一个是现实。
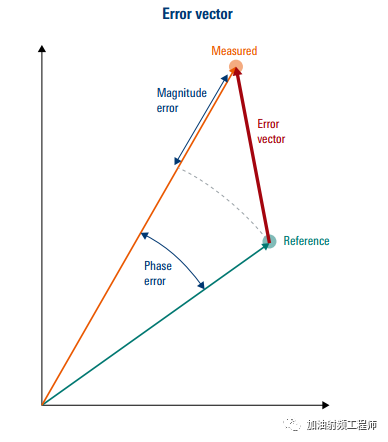
星座图中的点,其与原点连接的矢量,所对应的长度和角度,分别对应信号的幅度和相位。
理想点与原点的连接,是一个参考的矢量。
实测点与原点的连接,是一个实测的矢量。
而理想点与原点的连接,就被称为误差矢量(error vector)。
和所有矢量一样,误差矢量有幅度,有方向。
在数字调制中,主要关注误差矢量的幅度,不纠结方向。
因此,最重要的测量目标,是误差矢量的幅度,即EVM,全称为error vector magnitude.
人都知道,理想与现实的差距越小越好。
所以,误差矢量的幅度,也是越小越好。
那差别主要来自哪里呢?
一个来自幅度误差(magnitude error),也就是说接收到的矢量与参考的矢量相比,要么太长,要么太短。
一个来自相位误差(phase error),也就是说接收到的矢量与参考的矢量相比,角度有差。
EVM大,则代表测量点和理想点之间的距离很大。
也就是说理想点A所对应的测量点,可能与理想点B的位置更接近。
这样,会导致接收端误判的概率提高。
因此,减小EVM,是无线通信系统中的重要目标之一。
对EVM造成影响的因素主要有哪些?
影响EVM的因素,可以分为四大类,分别为幅度影响,相位影响,I/Q不平衡,配置因素。
说到幅度影响。
首先,与幅度相关的因素,都可能会影响EVM。
比如说,信号太高,导致器件进入非线性;或者信号太低,容易受噪声影响,此时都会增加EVM。
比如说,外界干扰,或者系统内的杂散,也会影响EVM。
比如说,相应带宽内不平坦的频率响应,也可能增加EVM。
.......
说到相位影响。
也就是说,与相位相关的因素,都会可能影响EVM。
比如说,信号相噪的影响。我的理解是这样的(欢迎批判):本身相位调制是基于理想相位的,如果相位噪声太高的话,理想相位本身就不理想了。
比如说,相位响应随频率的变化而变化。我的理解是这样的(欢迎批判):可以理解为群时延随着频率的变化有抖动,这样的话,不同频率的信号经过时,其相位变化也会不一样,导致EVM增加。
还有就是I/Q不平衡。
比如说增益不平衡,相位不平衡,直流馈通等。
说到配置因素。
就包括发端和收端,设置的匹配滤波器的类型或参数,符号率等设置的有差别。
EVM计算时的注意点
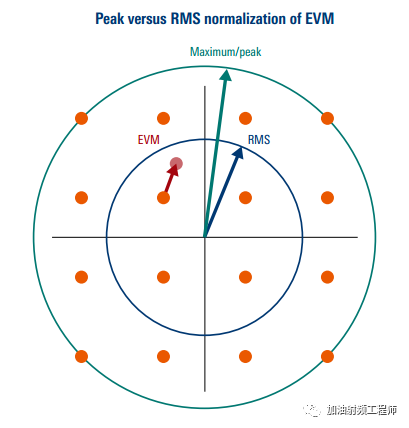
EVM计算时,会归一化。
有两种归一化的方法,一种是用最大峰值功率来归一化;另一种,是用RMS功率来归一化。
在比较EVM时,需要保证使用同样的归一化方法。
EVM的单位可以是%,也可以是dB。
对于单位为%的EVM值,小的百分比值,表示更好的EVM。
对于单位为dB的EVM值,通常为负值,越负,EVM越好。
EVM在debug中的作用
重点来了哈!虽然说,我没有用过这种方法来进行过debug。
但是看上去,好像很好用的样子。
首先,看看EVM随时间变化的曲线的作用。
EVM是基于每个符号进行计算的,也就是说,每个符号都会计算EVM。
因此,EVM可以绘制成时间的函数,也可以看成连续符号的函数。
比如如下图,发送和接收符号率之间细微的差异,使得EVM随时间变化的曲线呈现出一个V形曲线。
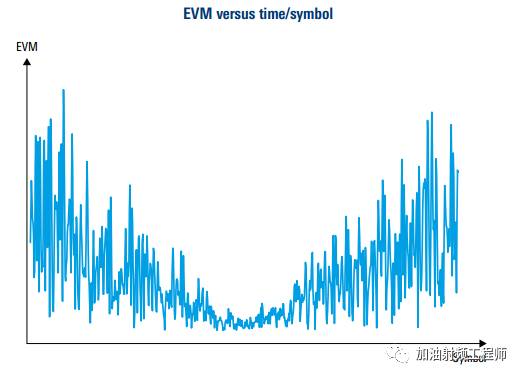
突发或者脉冲信号,在开始或结束的时候,由于各种放大器效应或时序的影响,EVM可能会高点。
如果幅度随时间变化,可能会使得幅度相对较高或者幅度相对较低的符号的EVM变大。
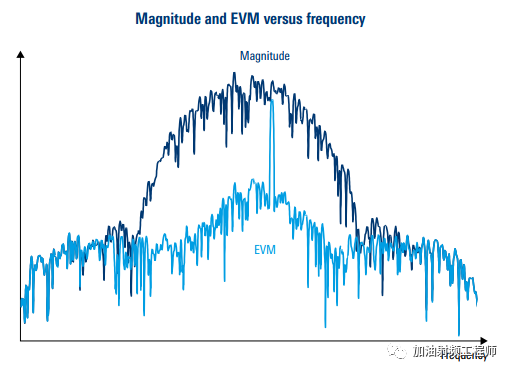
EVM也可以绘制成随频率的曲线。
EVM随频率变化的函数,是对上面的EVM随时间变化的函数进行FFT变换。
而这个曲线最有用的应用,是可以发现带内的杂散信号或者干扰。
如下图所示,蓝色曲线为幅度谱,看不出任何有杂散信号。青色曲线为EVM谱,上面可以明显的看到带内杂散性。
这是因为,叠加有杂散信号的有用信号的EVM,只会在杂散频率处变高。
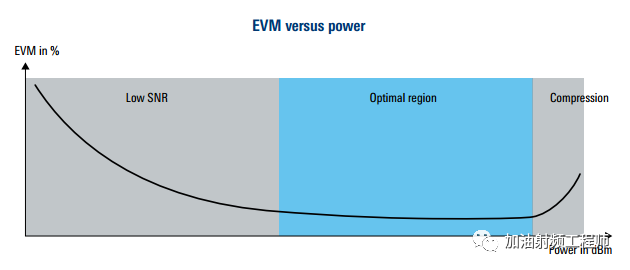
还有EVM与功率之间的关系,即看EVM随着输入功率变化的函数。
如下图所示,曲线为一个浴缸形状的曲线。低输入电平时,SNR较小,导致较高的EVM;高输入电平时,器件进入非线性,EVM也会恶化。
所以,这个EVM与功率的曲线,可以用来确定器件的最优工作区域。
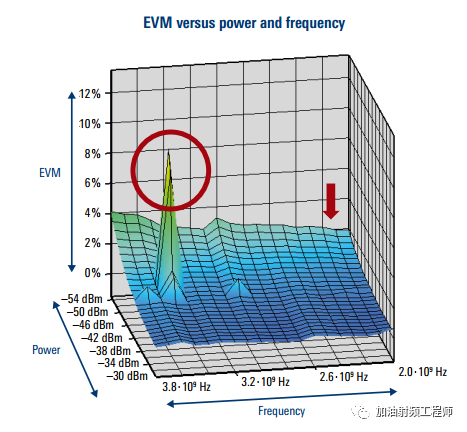
EVM随功率以及频率变化的曲线
在三维空间内,绘制EVM随功率和频率变化的曲线,可以很容易的找出被测器件的随频率变化趋势或者问题区域。
参考文献:
[1] Rohde&Schwarz White Paper,UNDERSTANDING EVM