序号 | 部件名称 | 功用 |
1 | 高度传感器 | 实时采集座椅当前高度 |
2 | 进气阀和排气阀 |
信号类型 | 信号名称 | 精度 | 数据范围 | 数据说明 | |
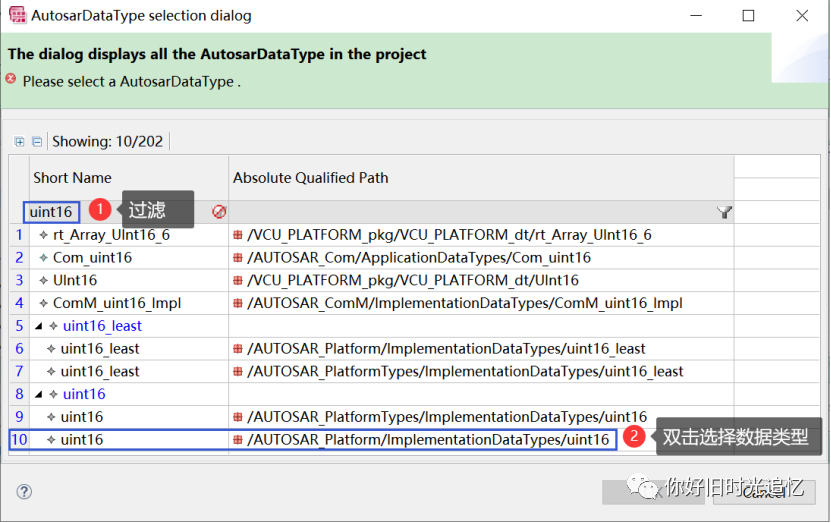
objectLevel | 0.1mm | uint16 | 0-200(mm) | ||
0.1mm | uint16 | 0-200(mm) | |||
level_quality | - | uint8 | 0-255 | ||
0.1mm | sint16 | 0-100(mm) | 正向精度值 | ||
0.1mm | 负向精度值 | ||||
enable | 0/1 | boolean | 0-1 | ||
输出信号 | Control_status | uint8 | |||
is_Control_Over | 0/1 | boolean | 0-1 |


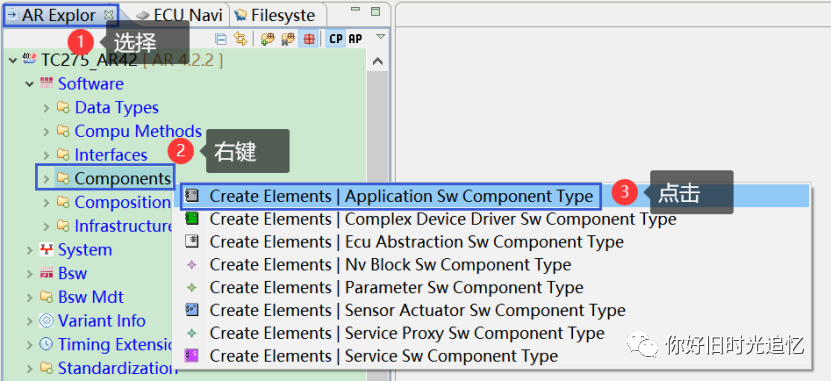
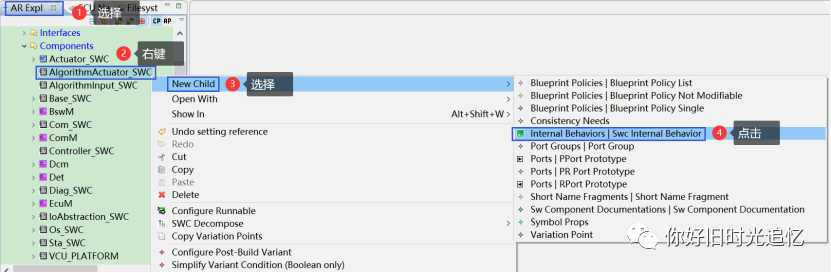
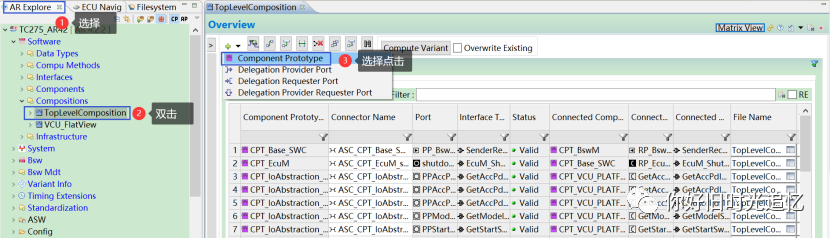
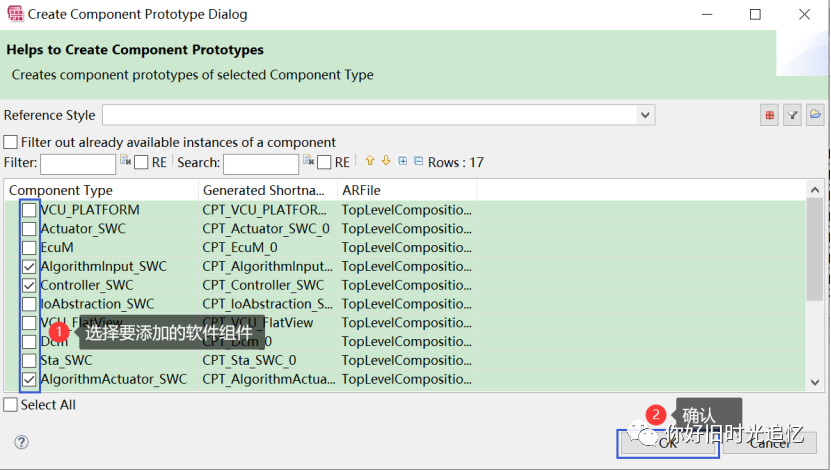
序号 | 软件组件名称 | 软件组件功用 |
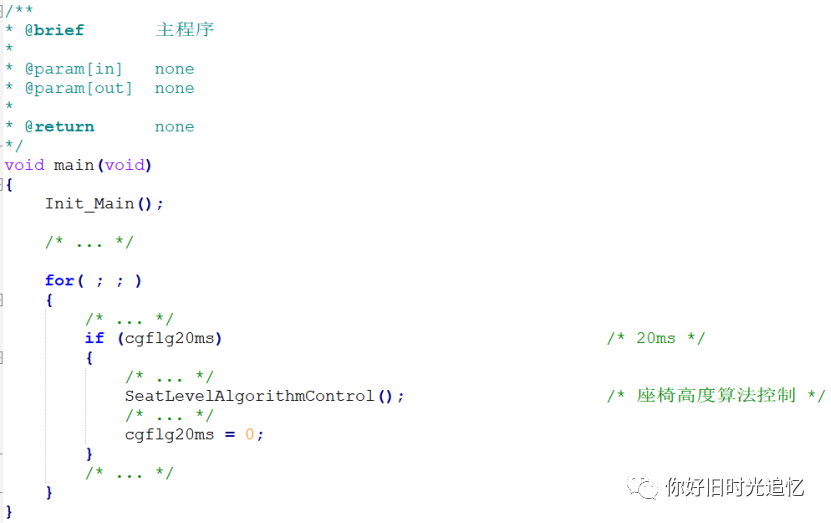
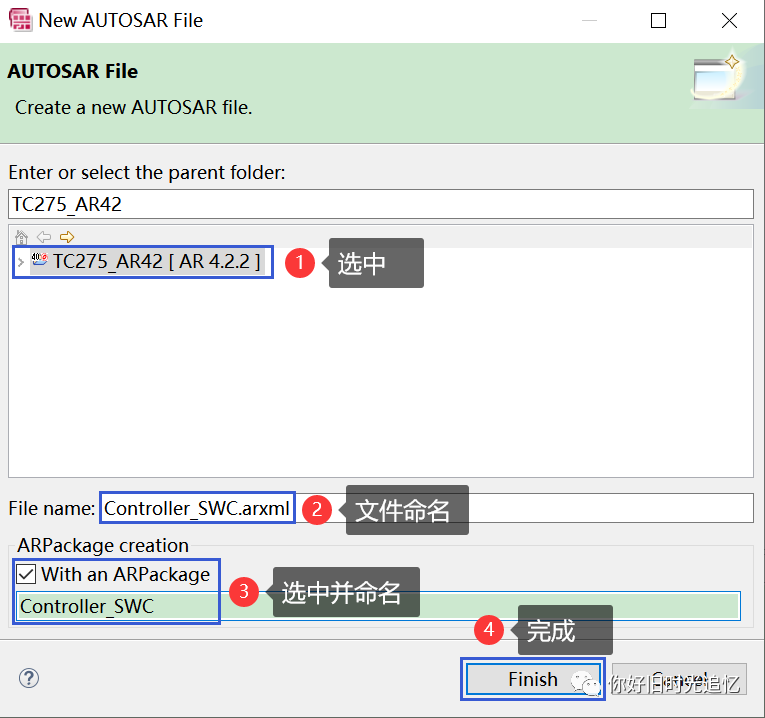
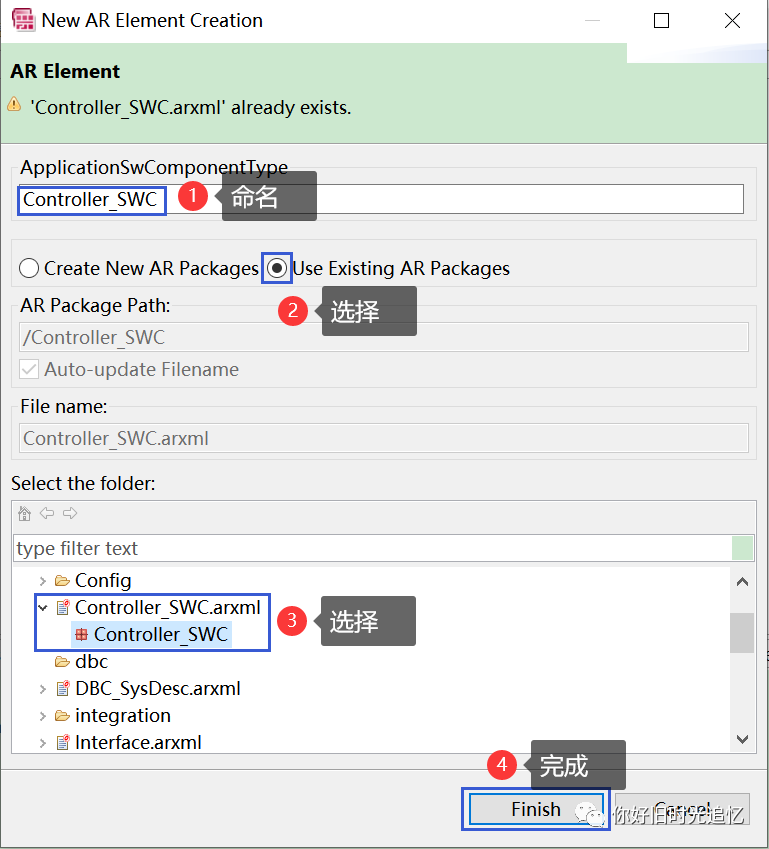
1 | Controller_SWC | 控制软件组件,用于运行座椅高度控制的算法 |
算法输入软件组件,用于提供座椅高度控制的输入参数 | ||
算法执行软件组件,用于执行进气阀和排气阀的开闭动作 |
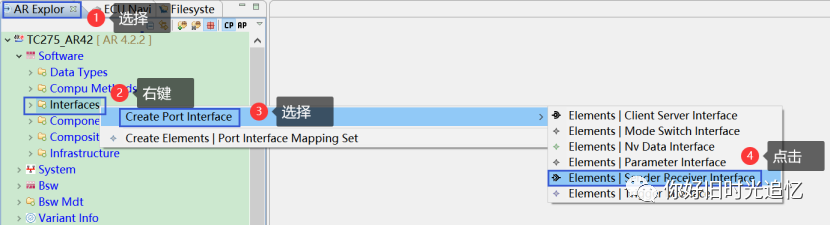
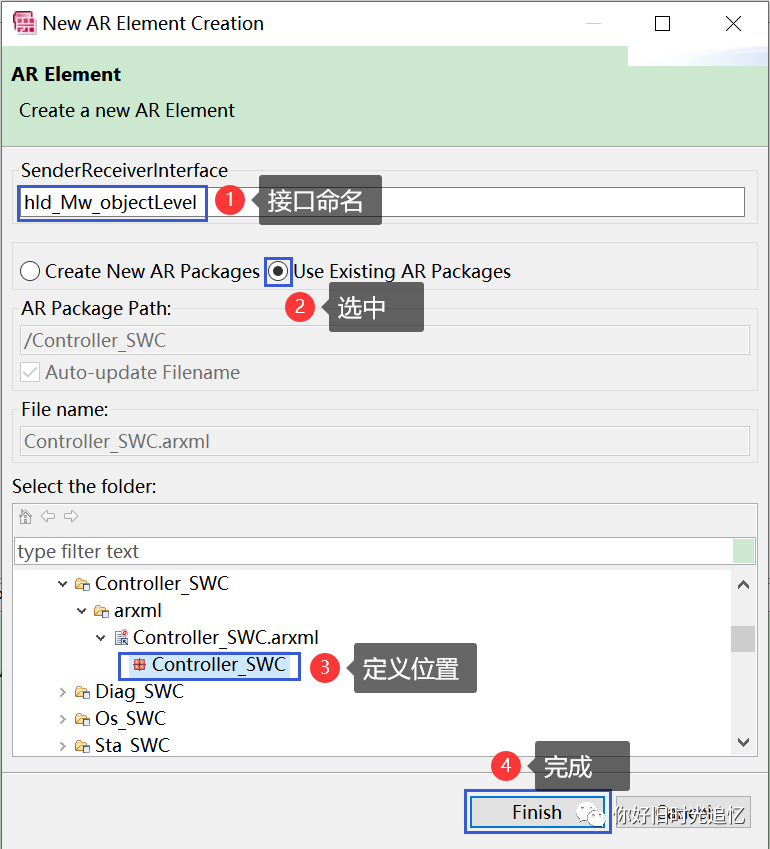
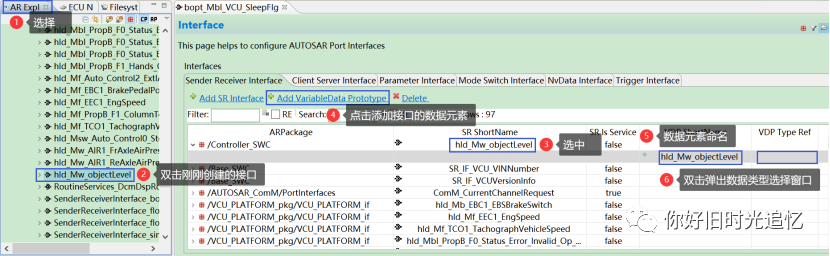
接口名称 | 数据元素名称 | |||
hld_Mw_objectLevel | ||||
4 | ||||
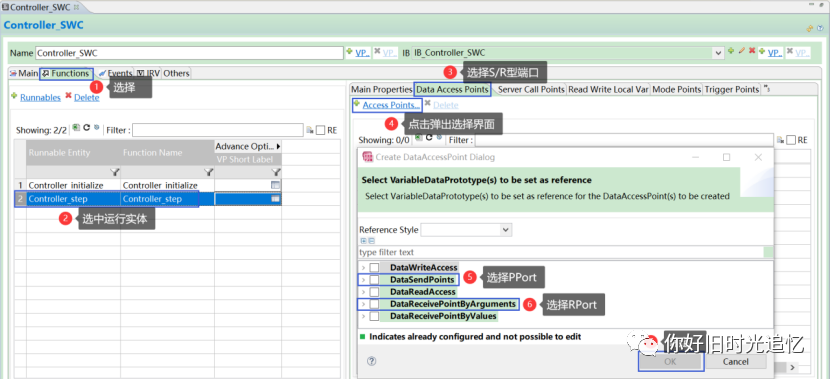
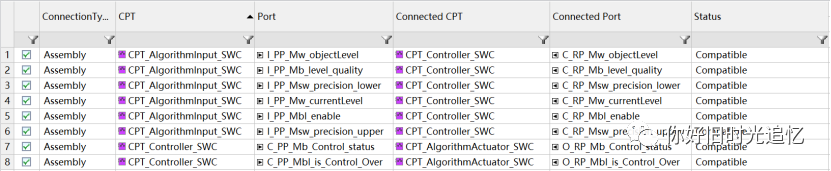
端口 | 映射接口 | 说明 | |||
类型 | 名称 | 类型 | 映射接口名 | ||
1 | RPort | C_RP_Mw_objectLevel | S/R | hld_Mw_objectLevel | 座椅目标高度 |
2 | RPort | C_RP_Mw_currentLevel | S/R | hld_Mw_currentLevel | 座椅当前高度 |
3 | RPort | C_RP_Mb_level_quality | S/R | hld_Mb_level_quality | 质量信号 |
4 | RPort | C_RP_Msw_precision_upper | S/R | hld_Msw_precision_upper | 正向精度值 |
5 | RPort | C_RP_Msw_precision_lower | S/R | hld_Msw_precision_lower | 负向精度值 |
6 | RPort | C_RP_Mbl_enable | S/R | hld_Mbl_enable | 算法控制使能标志 |
7 | PPort | C_PP_Mb_Control_status | S/R | hld_Mb_Control_status | 进气阀和排气阀状态 |
8 | PPort | C_PP_Mbl_is_Control_Over | S/R | hld_Mbl_is_Control_Over | 控制算法调节完毕标志 |
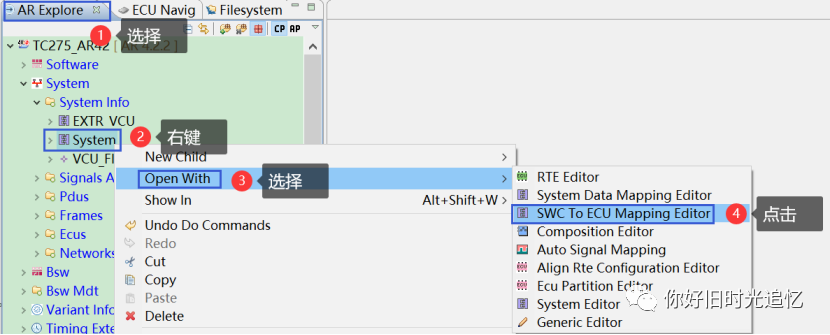
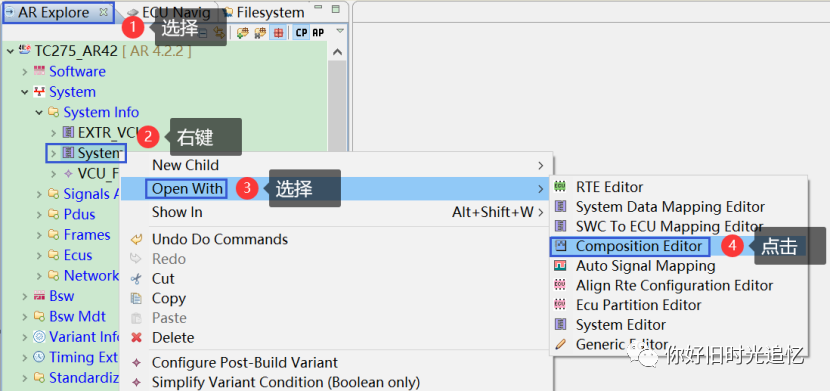
图5-11为添加软件组件端口的方法。

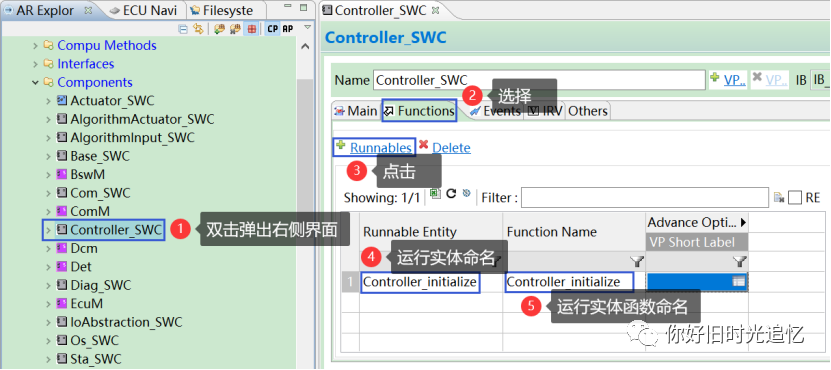
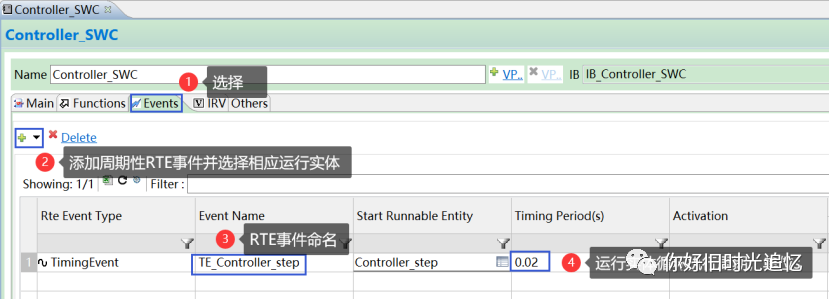
运行实体名 | 函数名 | 功用 | |
1 | Controller_initialize | Controller_initialize | 控制模块初始化 |
2 | Controller_step | Controller_step | 控制模块执行步骤 |
运行实体名 | 函数名 | 功用 | |
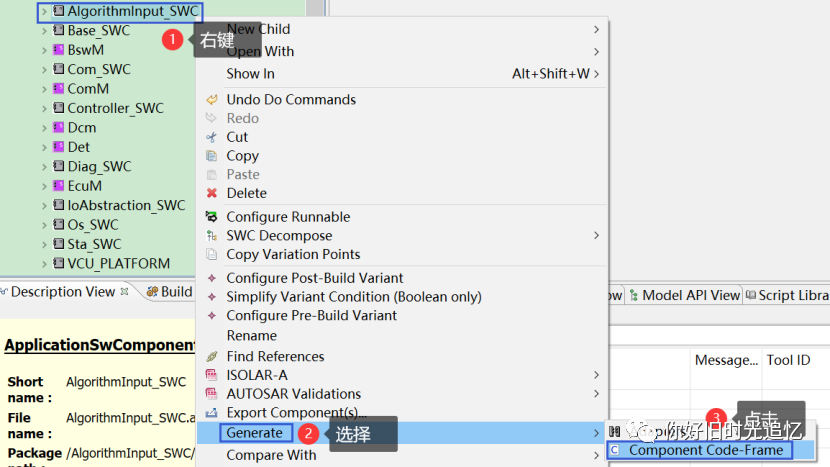
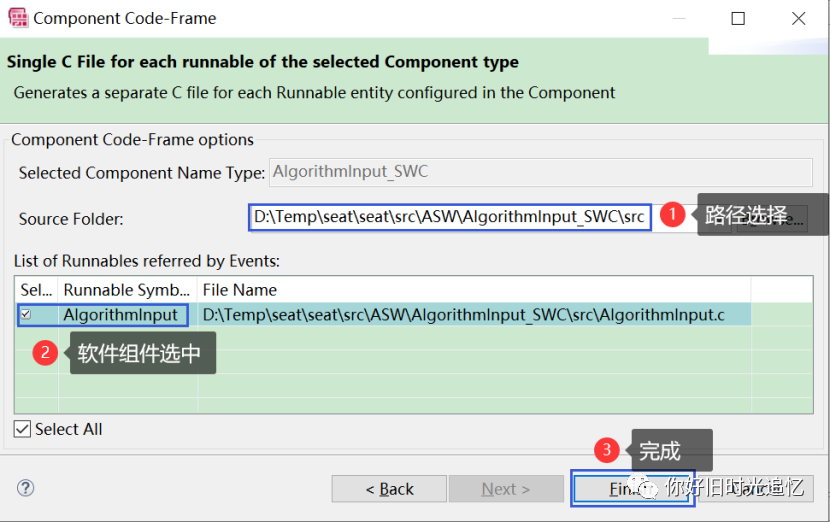
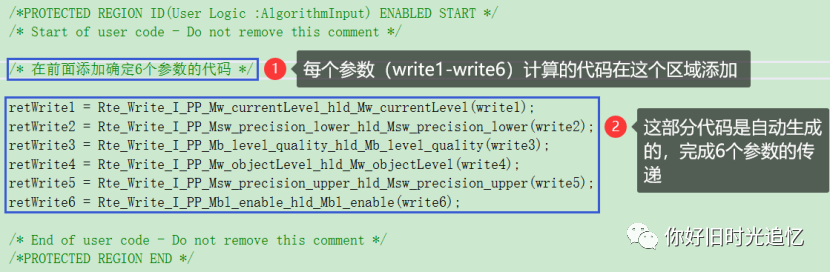
1 | AlgorithmInput | AlgorithmInput |
运行实体名 | 函数名 | 功用 | |
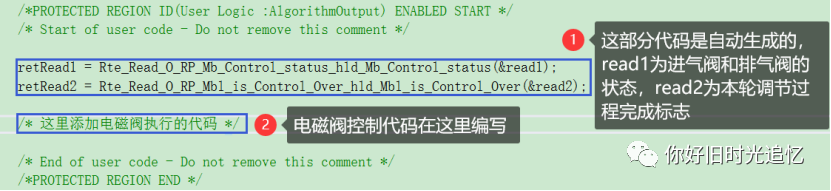
1 | AlgorithmOutput | AlgorithmOutput |

下面针对一些未明确事项进行说明。
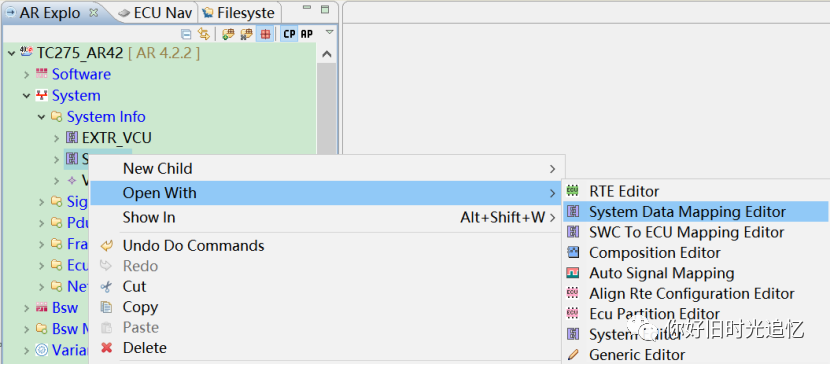
座椅ECAS控制器软件没有涉及到系统信号,但对于大部分车载ECU来说,与车载CAN网络的交互(从CAN网络接收数据和向CAN网络发送数据)是必不可少的,此时可参照图5-26的方法进行系统信号连接。
—END—
添加下方信加入汽专业交流群
(仅限专业人士)


