

(4)基于RS232 接口的 Modbus-RTU 从机实现
1、modbus 协议是工业运用比较成熟的通信协议,本例基于瑞萨RA6M4单片机进行modbus协议的实现,开源的modbus 协议较多,本例以移植Xtiny-Modbus为展示:
(1)第一步:搭建硬件环境
由于开发板没有带串口,需要外接一个串口收发模块

(2)第二步:下载开源的源码,下载地址:Xtiny-Modbus移植示例 https://gitee.com/zhang_en/xtiny_-modbus_test.git
(3)第三步:建立工程,配置时钟
由于外部高速晶振24MHz没有焊接,需要配置为内部晶振16MHz,然后再2分频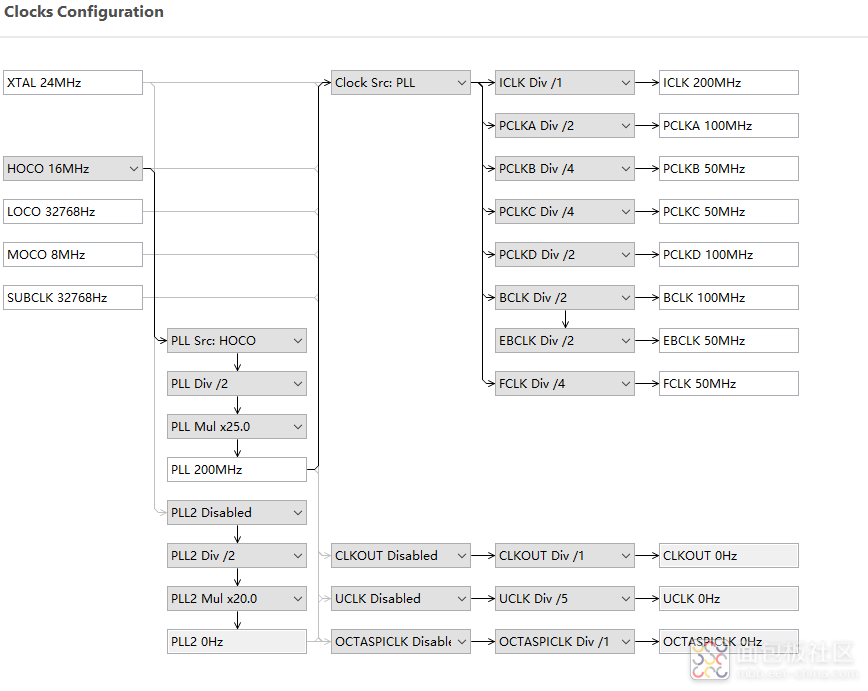
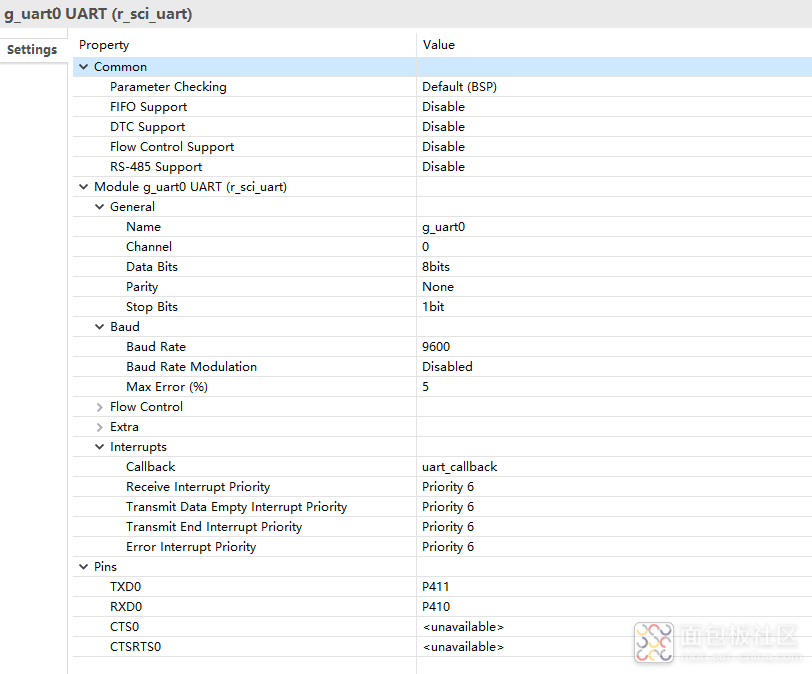
(4)第四步:配置串口
设置波特率、回调函数、中断优先级
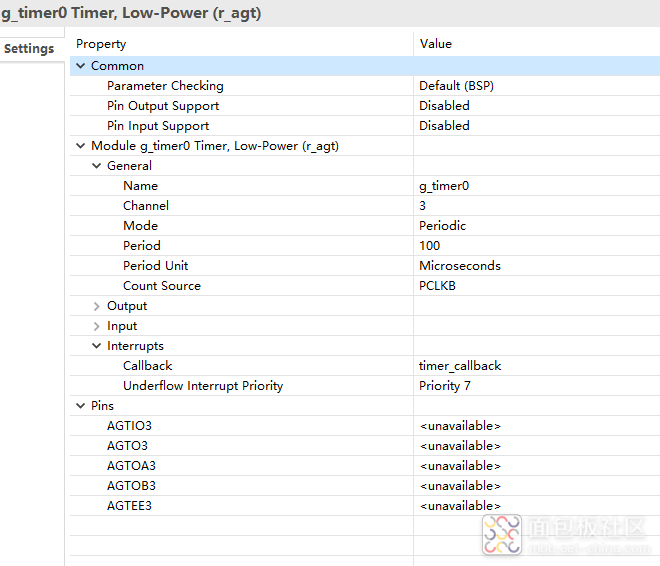
(5)第五步:配置定时器
设置定时器计时的周期,回调函数、中断优先级
(6)第六步:编写串口驱动函数
volatile uint8_t flag=false;void RS485RWConvInit(void){//收发引脚配置// R_IOPORT_Open(&g_ioport_ctrl,g_ioport.p_cfg);// R_IOPORT_PinWrite(&g_ioport_ctrl,BSP_IO_PORT_05_PIN_03,BSP_IO_LEVEL_LOW);}//串口1配置void init_usart3(void){R_SCI_UART_Open(&g_uart0_ctrl,g_uart0.p_cfg);RS485RWConvInit();}void usart3_send_byte(uint8_t byte){R_SCI_UART_Write(&g_uart0_ctrl,(uint8_t*)(&(byte)),1);while(flag!=true);flag=false;}void usart3_send_bytes(uint8_t *bytes,int len){int i;for(i=0;iusart3_send_byte(bytes[i]);}}void usart3_send_string(char *string){while(*string){usart3_send_byte(*string++);}}void uart_callback(uart_callback_args_t *arg){uint8_t data_r;switch(arg->event){case UART_EVENT_RX_CHAR:// R_SCI_UART_Read(&g_uart0_ctrl,(u8*)(&(data_r)),1);data_r=(uint8_t)(arg->data);MDSSerialRecvByte(data_r);MDMSerialRecvByte(data);extern Modbus_RTU modbus_RTU;MD_RTU_MsgPut((PModbusBase)(&modbus_RTU), MD_RTU_MSG_HANDLE_ARG(&modbus_RTU),(void*)(data),0);break;case UART_EVENT_TX_COMPLETE:flag=true;break;default:break;}}
(7)第7步编写定时器驱动程序:
//#include "MDS_RTU_Serial_1.h"volatile uint32_t sys_tick_100us=0;void TIM3_Int_Init(void){R_AGT_Open(&g_timer0_ctrl,g_timer0.p_cfg);R_AGT_Start(&g_timer0_ctrl);}void timer_callback(timer_callback_args_t *arg){if(arg->event==TIMER_EVENT_CYCLE_END)// if (timer_interrupt_flag_get(TIMER5, TIMER_INT_FLAG_UP) != RESET){sys_tick_100us++;MDSTimeHandler100US(sys_tick_100us);MDMTimeHandler100US(sys_tick_100us);}}
(8)第八步:编写应用程序
static void MDS_RTU_UserUpdate(void){uint16 temp=0xff;uint16 temp1[]={1,2,3,4,5};MDS_RTU_WriteCoils(&modbusS_RTU,1,5,&temp);MDS_RTU_WriteHoldReg(&modbusS_RTU,11, temp);MDS_RTU_WriteHoldRegs(&modbusS_RTU,5,5,temp1);}
(9)第九步:编写处理程序
FSP_CPP_HEADERvoid R_BSP_WarmStart(bsp_warm_start_event_t event);FSP_CPP_FOOTER/*******************************************************************************************************************//*** main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function* is called by main() when no RTOS is used.**********************************************************************************************************************/void hal_entry(void){/* TODO: add your own code here */OSInit();//delay_init();MDS_RTU_APPInit();MDM_RTU_APPInit();TIM3_Int_Init();task1=OSCreateTask(mdTestTask0,NULL,6,256);task2=OSCreateTask(mdTestTask1,NULL,6,256);SysTick_Config(SystemCoreClock / OS_T IC KS_PER_SEC);OSStart();while(1){MDS_RTU_Loop();MDM_RTU_Loop();MDM_RW_CtrlLoop();}/* Enter non-secure code */R_BSP_NonSecureEnter();}
(10)第十步:连接Modbus 主机,查看结果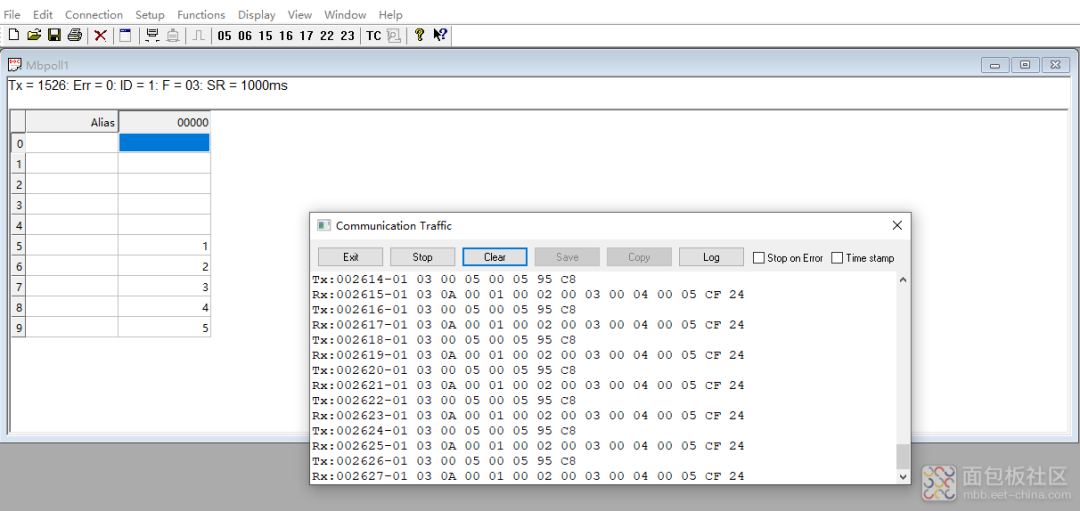
END



点击阅读原文,免费申请
