

智能车辆软件体系大概可分为感知层、决策规划层和执行层,如图1所示。其中感知层需要利用雷达、摄像头及惯性导航等车载传感器用于感知周围环境信息;决策规划层是根据已经感知的周围车辆信息并且结合现有的约束条件,为车辆做动作指导,包括车辆一系列的行为决策、路径规划、速度规划等;执行层是指车辆在得到相应的控制指令后,控制车辆的转向、驱动、制动等动作。
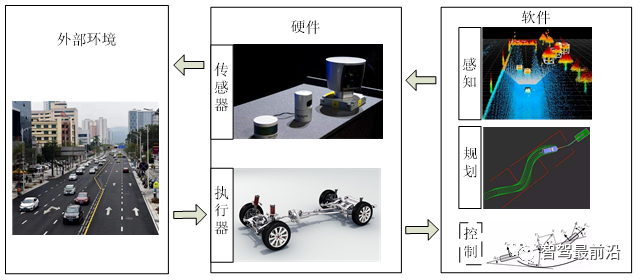
图1 分层式智能驾驶体系
车辆在进行换道避障过程中主要包含了行为决策、路径规划以及横向动力学控制。但是在进行避障之前对原始传感器检测到的障碍物信息处理尤为重要,特别是当传感器的精度达不到预期要求时,车辆在行驶过程中会有碰撞风险。因此需要设计前方目标车辆的行驶场景识别过程,可有效提供给本车是否有换道避障的必要。还需要对前方多个障碍物信息进行筛选,来确定本车道内的主目标车辆(CIPV),进而保证车辆在换道避障之前传感器信息不会发生误报或者漏报的情况。

目标换道和弯道场景识别
智能车的横纵向控制中需要对弯道和换道场景进行识别,以适当调整车辆的控制策略。当前车进行换道切入切出时,本车是否进行常规驾驶模式、危险驾驶模式和换道避障的切换;又当前车入弯行驶时意味着本车是否需要减速入弯。此外,前车弯道行驶与换道行驶也会影响到主目标(CIPV)的筛选,因此,弯道和换道的目标场景识别非常重要。
1.1 问题描述
目前利用雷达或摄像头等传感器实现弯道目标车辆识别及跟踪主要存在三个问题:(1)目标车辆进/出弯与目标车辆换道/并道较难区分;(2)相邻弯道中的障碍物车辆对实现本车道目标跟踪识别存在干扰;(3)路边障碍物对雷达存在干扰;(4)车辆自身运动传感器和环境感知传感器存在一定误差和干扰。
前方CIPV车辆在直道目标场景识别过程中可分为两种情况如图2所示:(1)前方目标障碍物车辆在行驶过程中切出本车道;(2)前方目标障碍物在旁边车道行驶过程中切入本车道。
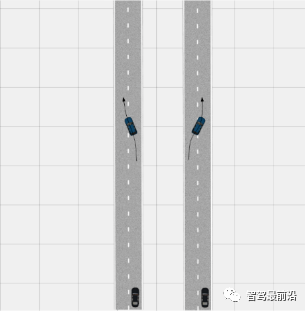
图2 前方目标障碍物换道场景识别过程图
在前方CIPV车辆在弯道识别过程中可分为三大阶段:(a)前方目标车辆已经进入弯道,本车在直道上行驶;(b)前方CIPV车辆与本车都在弯道中行驶;(c)前方CIPV车辆驶出弯道,本车仍处于弯道。如图3所示。
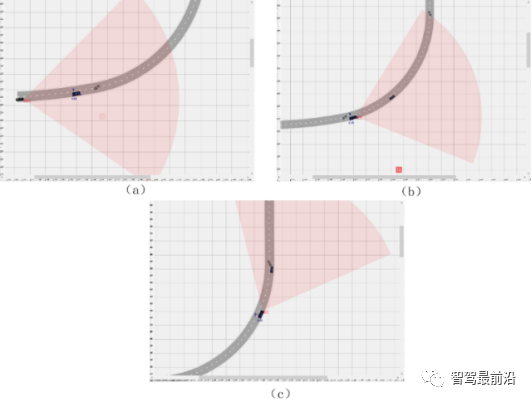
图3 本车弯道目标场景识别过程图
通过图2和图3对比,车辆入弯出弯与车辆的换道切出十分类似,车载传感器很难将二者区分开。针对图2障碍物车辆切入、切出过程,前方CIPV车辆相对本车车辆横向距离变化较小;针对图3车辆入弯、出弯过程,前方CIPV车辆相对本车车辆横向距离变化较大。
明尼苏达大学Rajamani教授给定动力学估计道路曲率方法:
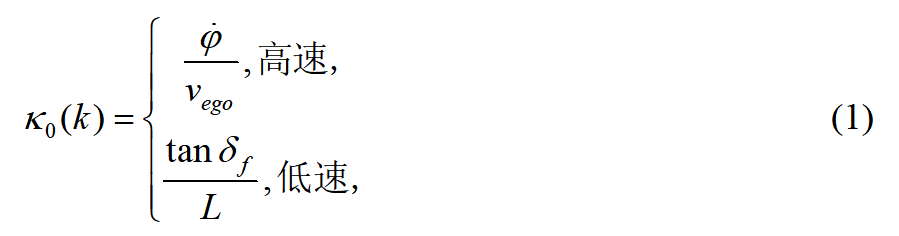
上式中 为智能车车辆轴距,
为智能车车辆轴距, 为前轮转角,
为前轮转角,

为横摆角速度。
假设在真实的交通场景中前方车辆共有N个,其中前方目标车辆 与本车相对横向距离为
与本车相对横向距离为 和纵向距离
和纵向距离 ,根据回旋线曲线模型,其中各个目标车辆与本车行驶道路曲率半径为:
,根据回旋线曲线模型,其中各个目标车辆与本车行驶道路曲率半径为:

其中 分别是目标车
分别是目标车 与本车行驶的曲率半径。
与本车行驶的曲率半径。
以车辆换道目标场景识别并且目标车切出为例,建立局部坐标系,假设该目标车辆换道时轨迹方程为:

 为换道时需要的路径长度,
为换道时需要的路径长度, 为车宽,且与方向一致,以本车左侧为正方向,相应目标车半径
为车宽,且与方向一致,以本车左侧为正方向,相应目标车半径 和本车半径
和本车半径 左转为正,右转弯为负。假设
左转为正,右转弯为负。假设 ,目标车相对本车横向速度:
,目标车相对本车横向速度:

车辆坐标系下,目标车相对本车方位角:

根据上式(4)和上式(5)可得椭圆域:
椭圆域方程(6)可根据图4所示的车辆行驶场景建立起来,该方程同样可用于其他换道场景:
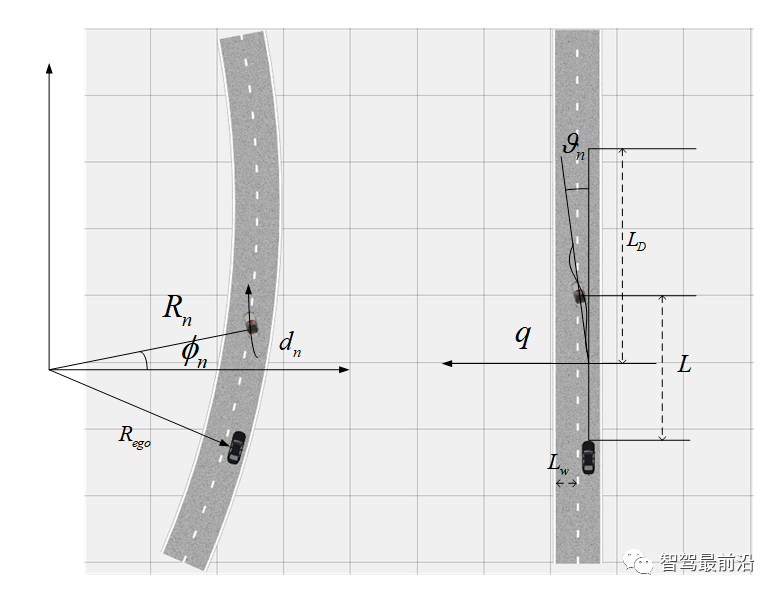
图4前方车辆换道场景分析
1. 左转弯左切出或右切入:左转弯时,前车向左切出本车道或从左侧右切入本车道,
2. 右转弯左切出或右切入:右转弯时,前车向左切出本车道或从左侧右切入本车道,
3. 左转弯左切入或右切出:左转弯时,前车向右切出本车道或从右侧左切入本车道,
4. 右转弯左切入或右切出:右转弯时,前车向右切出本车道或从右侧左切入本车道,
相对横向速度 和相对横向距离
和相对横向距离 满足椭圆域关系,对于目标车辆来说,构建如下变量之间的关系:
满足椭圆域关系,对于目标车辆来说,构建如下变量之间的关系:

由回归分析法,可得如下关系式:

椭圆域方程:

回归系数:

考虑传感器测量时会存在干扰误差,利用上式(8)和上式(10)对车辆换道过程描述会存在一定误差,即:

 为回归误差,引入优化思想降低目标车辆换道行为识别过程中的建模误差,求解如下所示的优化问题:
为回归误差,引入优化思想降低目标车辆换道行为识别过程中的建模误差,求解如下所示的优化问题:

假设回归系数 ,回归方程转化为:
,回归方程转化为:

式(13)中的 是式(12)
是式(12) 最优估计值。引入R-square确定性系数衡量回归效果,同时对回归效果进行评价。针对过去目标车辆
最优估计值。引入R-square确定性系数衡量回归效果,同时对回归效果进行评价。针对过去目标车辆 在过去
在过去 个时刻的历史数据
个时刻的历史数据 ,根据回归方程可得估计值
,根据回归方程可得估计值 ,定义回归置信度:
,定义回归置信度:
其中 的平均值。其中
的平均值。其中 在[0,1]之间,其中
在[0,1]之间,其中 越大则对目标换道行为越准确,即表示车辆正在换道。
越大则对目标换道行为越准确,即表示车辆正在换道。
弯道的入弯出弯与前车换道场景基本相似,如图5所示,车辆从直道跟车进入弯道车辆的方位角会有所变化,车辆出弯时前车与后车的方位角也有所变化,可表示为:
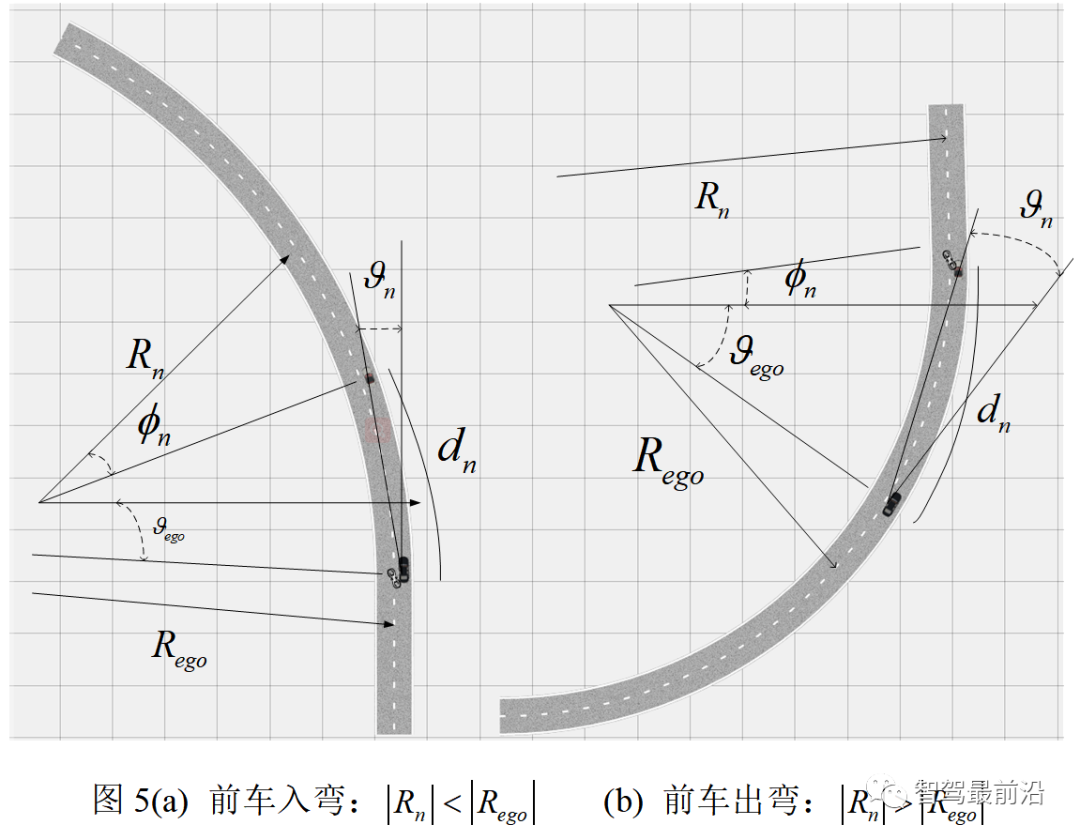
弯道场景方程同样适用于其他场景,其中包括:
1. 车辆在弯道行驶过程中,左转弯入弯,左转弯时,前车率先入弯:
2. 车辆在弯道行驶过程中,右转弯入弯,右转弯时,前车率先入弯:
3. 车辆在弯道行驶过程中,左转弯出弯,左转弯时,前车率先出弯:
4. 车辆在弯道行驶过程中,右转弯出弯,右转弯时,前车率先出弯:
利用回归分析法,设计目标车辆 的横向距离
的横向距离 之间满足关系:
之间满足关系:

根据式(2)和式(16),可得回归系数:

为了降低弯道行驶过程中车辆行为识别的建模误差,构建优化问题:

利用二次拟合求的回归系数 回归方程为:
回归方程为:

 为横向距离
为横向距离 最优估计值。
最优估计值。
与直道换道场景3.1.2类似,引入R-square确定性系数评价弯道行驶场景回归效果。定义回归置信度:

其中 平均值。其中
平均值。其中 在[0,1]之间。越大则对目标换道行为越准确,即表示车辆正在过弯,回归效果越好。
在[0,1]之间。越大则对目标换道行为越准确,即表示车辆正在过弯,回归效果越好。
式(14)中 和式(20)中分别代表前方目标障碍物直道切入切出过程中目标运动模型的拟合置信度和前方目标障碍物弯道入弯出弯过程中目标运动模型的拟合置信度。当车辆在行驶过程中(直线行驶、弯道行驶、换道行驶),可根据(14)和(20)对前方驾驶车辆行为进行有效区分,从而实现对前方目标障碍物行为的精准预测来达到车辆常规模式和危险模式的有效切换,同时可提高智能车在行驶过程中的安全性及舒适性。其目标场景识别过程中拟合置信度需要大于95%,才能代表前方目标障碍物车辆在直道上的切入切出或弯道上入弯出弯等驾驶行为。
和式(20)中分别代表前方目标障碍物直道切入切出过程中目标运动模型的拟合置信度和前方目标障碍物弯道入弯出弯过程中目标运动模型的拟合置信度。当车辆在行驶过程中(直线行驶、弯道行驶、换道行驶),可根据(14)和(20)对前方驾驶车辆行为进行有效区分,从而实现对前方目标障碍物行为的精准预测来达到车辆常规模式和危险模式的有效切换,同时可提高智能车在行驶过程中的安全性及舒适性。其目标场景识别过程中拟合置信度需要大于95%,才能代表前方目标障碍物车辆在直道上的切入切出或弯道上入弯出弯等驾驶行为。
1.阈值计算
根据T分布定义可以得出,相关系数和自由度求解的临界值表达式为:

上式中,n代表自由度,r代表相关系数即置信度阈值,t是T分布的临界值,可通过查表得出,则上式(21)可转化为:

2. 回滞函数设置
在真实的台架测试或者实车实验过程中,传感器会存在一定的噪声干扰和数据波动,因此需要设计一定的回滞区间来保证车辆在识别过程中的准确性。其中回滞函数表达式为:
上式中置信度区间设置在80%~95%之间。以车辆在直道上行驶过程为例,上式中当 时表示前方目标障碍物正在切入、切出动作或已完成切入、切出动作;上式中当
时表示前方目标障碍物正在切入、切出动作或已完成切入、切出动作;上式中当 时表示前方目标障碍物无切入或切出动作。
时表示前方目标障碍物无切入或切出动作。

汽车行驶过程中,一般同车道车辆障碍物会对自车构成最大安全威胁,其次是相邻两车道车辆,本文在筛选过程中,主要将同车道的前方车辆作为危险有效目标,相邻车道车辆障碍物作为潜在危险目标。针对本车道以及相邻车道障碍物运动状态判别方程为:
其中判别前方障碍物车辆静止的条件为:

 为相对纵向车速。
为相对纵向车速。
为了更好的区分直道和弯道上的障碍物车辆是否属于同一车道,建立弯道行驶过程中的道路模型如图6所示, 为前车在弯道上行驶的道路半径,
为前车在弯道上行驶的道路半径, 为自车行驶过程中的道路半径,
为自车行驶过程中的道路半径, 为摄像头传感器探测到前方障碍物的距离。
为摄像头传感器探测到前方障碍物的距离。
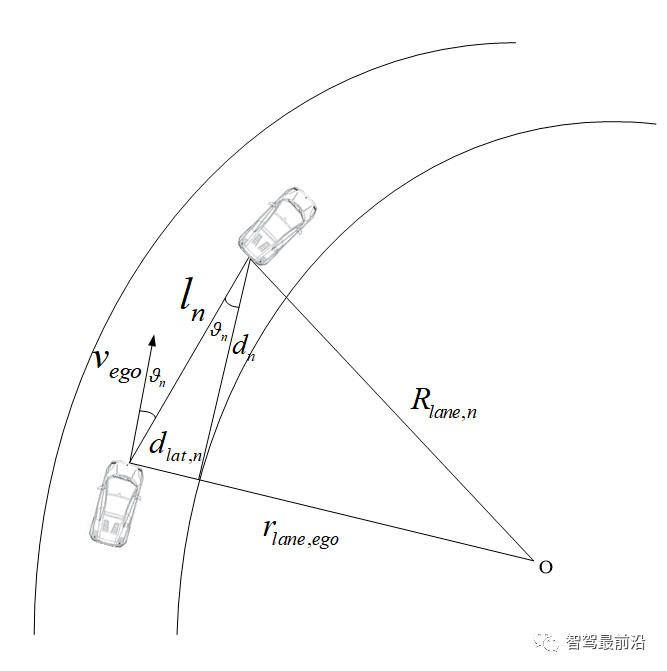
图6 车辆弯道行驶过程示意图
当车辆在弯道上行驶时:

其中
 表示左弯道行驶,
表示左弯道行驶, 表示右转弯行驶。假设已知道路宽度为
表示右转弯行驶。假设已知道路宽度为

上式中 为本车边界到本车道右车道线的距离,其值为负。
为本车边界到本车道右车道线的距离,其值为负。 为本车边界到本车道左车道线的距离,其值为正。可利用车道线检测进行获取。
为本车边界到本车道左车道线的距离,其值为正。可利用车道线检测进行获取。
 为车道线宽。
为车道线宽。
假设目标车辆位于左侧车道,满足:

目标车辆位于右侧车道,满足:

即:
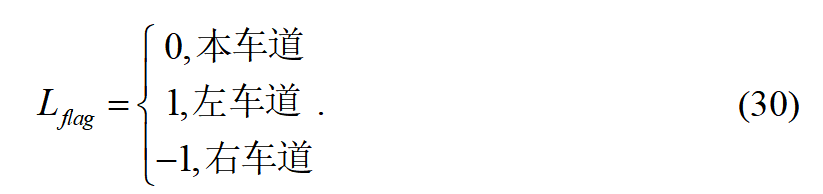
上式中 表示车辆位于本车道,
表示车辆位于本车道, 表示车辆位于左车道,
表示车辆位于左车道, 表示车辆位于右车道。
表示车辆位于右车道。
在多目标筛选过程中,筛选前方CIPV车辆对车辆紧急避障至关重要。针对本车道换道时的目标筛选和前车的切入切出的目标筛选属于相同策略,本文针对前方不同车道目标的切入和切出,来对CIPV车辆目标筛选进行说明。
为了保证车辆在道路上行驶的安全性,根据前方目标切入和切出的驾驶情况,将目标车分成常规模式和危险驾驶模式,并将其用于车辆换道避障。
(1)常规驾驶模式
如图7所示,当定义及筛选出前方车辆Q在本车道处于平稳驾驶阶段,且无其他POs车辆切入本车道,即CIPV车辆为本车道前车,即:


图7 驾驶模式分类图
其中, 分别为筛选出的CIPV纵向距离和纵向相对速度;
分别为筛选出的CIPV纵向距离和纵向相对速度; 分别为初始阶段本车道前车Q相对纵向距离和纵向相对速度。
分别为初始阶段本车道前车Q相对纵向距离和纵向相对速度。
(2)危险驾驶模式
如图9所示,当相邻车道目标车PO2突然切入本车道,且与本车道纵向距离较近,CPIV即为切入过来的本车道目标车PO2,即:

其中, 和
和 分别为本车道目标车PO2纵向距离和纵向相对速度,且满足条件:
分别为本车道目标车PO2纵向距离和纵向相对速度,且满足条件:

其中 为本车与目标车PO2的纵向安全距离,
为本车与目标车PO2的纵向安全距离, 为车辆纵向控制系统响应时间。
为车辆纵向控制系统响应时间。
定义前方障碍物 的状态和测量为:
的状态和测量为:

则障碍物运动状态空间模型为:

其中系统矩阵:
其中 为系统噪声,
为系统噪声, 为测量噪声,
为测量噪声,
根据障碍物运动模型,可对障碍物运动状态进行估计。卡尔曼滤波估计障碍物运动状态过程为:
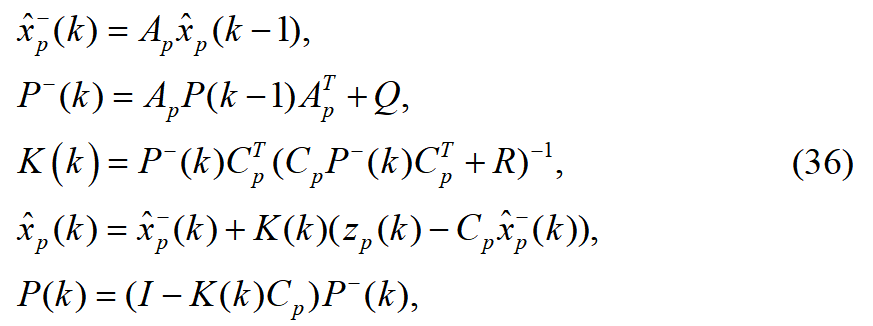
其中 和
和 为系统噪声和测量噪声的协方差。
为系统噪声和测量噪声的协方差。

小结
为了保障车辆换道避障的安全性,从车辆目标场景识别的角度入手设计车辆目标场景识别算法,建立弯道道路模型筛选出不同车道内的障碍物车辆并利用卡尔曼滤波对障碍物运动状态进行估计。
转载自智能运载装备研究所,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
-- END --

