

第三篇文章准备单独拿出来写,因为在大疆为人机的所有功能中,航线规划的功能最为复杂,也相当的繁琐,这里需要说仔细一点,可能会将代码进行多步分解。
1
航线打点
在地图中手动选择点位选择完成航线打点;若打点位置错了可进行点位删除。
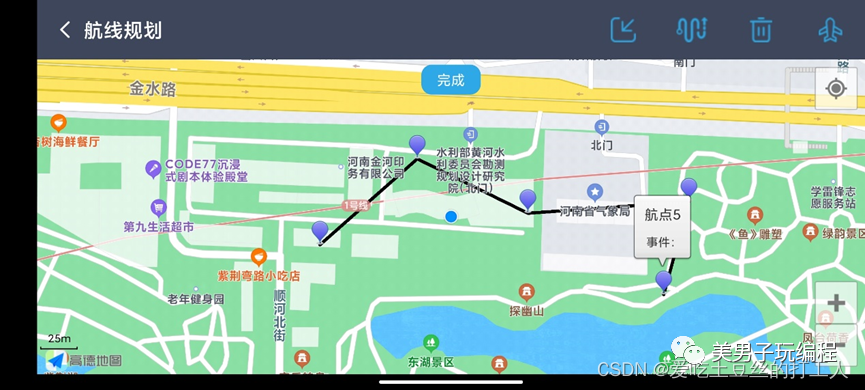
航点设置
可对航线点位进行设置,如飞行高度,速度(慢速:3m/s;中速: 7m/s;高速:10 m/s)、任务结束后操作及航向,点击[设置]按钮完成设置。
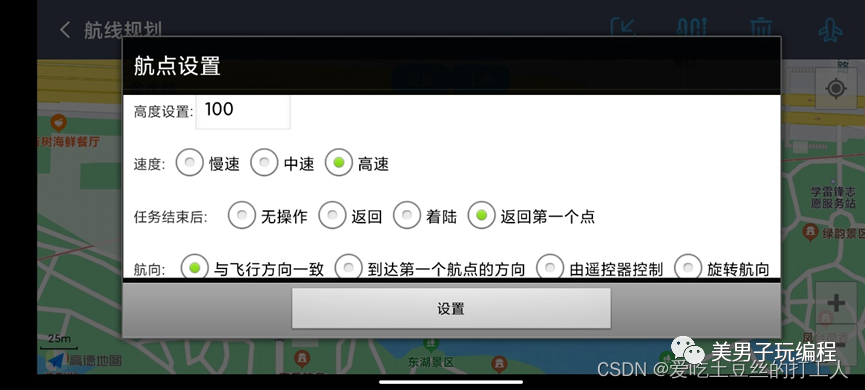
设置完成后会显示总距离及飞行总时间。

航线上传
点击[上传]按钮,进行航线上传。可以进入本地存储中选择航线文件进行上传,航线文件为 .kml结尾。

航线执行
点击 [开始]按钮,则可对航线进行执行。若中途需要暂停也可点击[暂停]安装进行暂停操作。
航线管理
按钮即可进入航线管理界面。
获取航线
点击[获取]按钮,即可将航线信息展示到地图界面中。
2
创建activity_setting_route.xml及SettingRouteActivity文件。
activity_setting_route.xml
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
tools:context=".ui.SettingRouteActivity">
<include
android:id="@+id/layout_route"
layout="@layout/activity_toolbar">include>
<RelativeLayout
android:layout_width="match_parent"
android:layout_height="match_parent">
<com.amap.api.maps.MapView
android:id="@+id/map"
android:layout_width="match_parent"
android:layout_height="match_parent" />
<LinearLayout
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_alignParentTop="true"
android:layout_centerInParent="true"
android:layout_marginTop="5dp">
<Button
android:id="@+id/btn_delete"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:text="删除"
android:textColor="@color/white"
android:background="@drawable/button_task_background">Button>
<Button
android:id="@+id/btn_finish"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:textColor="@color/white"
android:background="@drawable/button_task_background"
android:text="完成">Button>
<Button
android:id="@+id/btn_setting"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:textColor="@color/white"
android:background="@drawable/button_task_background"
android:text="设置">Button>
<Button
android:id="@+id/btn_upload"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:textColor="@color/white"
android:background="@drawable/button_task_background"
android:text="上传">Button>
<Button
android:id="@+id/btn_start"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:textColor="@color/white"
android:background="@drawable/button_task_background"
android:text="开始">Button>
<Button
android:id="@+id/btn_stop"
android:layout_width="60dp"
android:layout_height="30dp"
android:visibility="gone"
android:textColor="@color/white"
android:background="@drawable/button_task_background"
android:text="暂停">Button>
LinearLayout>
<LinearLayout
android:id="@+id/ll_information"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_alignParentBottom="true"
android:layout_centerInParent="true"
android:layout_marginBottom="5dp"
android:padding="10dp"
android:visibility="gone"
android:background="@color/color_nav_Item_unselected">
<TextView
android:id="@+id/tv_height"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="高度:"
android:textColor="@color/white"
>TextView>
<TextView
android:id="@+id/tv_speed"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="速度:"
android:textColor="@color/white"
android:layout_marginLeft="10dp"
>TextView>
<TextView
android:id="@+id/tv_count"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="航点数:"
android:textColor="@color/white"
android:layout_marginLeft="10dp"
>TextView>
<TextView
android:id="@+id/tv_distance"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="总距离:"
android:textColor="@color/white"
android:layout_marginLeft="10dp"
>TextView>
<TextView
android:id="@+id/tv_time"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="总时间:"
android:textColor="@color/white"
android:layout_marginLeft="10dp"
>TextView>
LinearLayout>
RelativeLayout>
LinearLayout>SettingRouteActivity
public class SettingRouteActivity extends BaseActivity implements AMap.OnMarkerClickListener, View.OnClickListener, AMap.OnMapClickListener, LocationSource, AMapLocationListener, AMap.InfoWindowAdapter {
@BindView(R.id.layout_route)
View mViewLayoutToolbar;
@BindView(R.id.ll_route)
LinearLayout mLinearLayout;
@BindView(R.id.tv_toolbar_title)
TextView mTextViewToolbarTitle;
// @BindView(R.id.map)
// MapView mMapView;
@BindView(R.id.btn_delete)
Button mButtonDelete;
@BindView(R.id.btn_finish)
Button mButtonFinish;
@BindView(R.id.btn_setting)
Button mButtonSetting;
@BindView(R.id.btn_upload)
Button mButtonUpload;
@BindView(R.id.btn_start)
Button mButtonStart;
@BindView(R.id.btn_stop)
Button mButtonStop;
@BindView(R.id.ll_information)
LinearLayout mLinearLayoutInformation;
@BindView(R.id.tv_height)
TextView mTextViewHeight;
@BindView(R.id.tv_speed)
TextView mTextViewSpeed;
@BindView(R.id.tv_count)
TextView mTextViewCount;
@BindView(R.id.tv_distance)
TextView mTextViewDistance;
@BindView(R.id.tv_time)
TextView mTextViewTime;
private MapView mMapView;
private OnLocationChangedListener mListener;
private AMapLocationClient mlocationClient;
private AMapLocationClientOption mLocationOption;
private double D_latitude, D_longitude;
private UiSettings mUiSettings;
private AMap aMap;
private Marker droneMarker = null;
private float altitude = 100.0f;
private float mSpeed = 10.0f;
private boolean isAdd = false;
private final Map mMarkers = new ConcurrentHashMap();
private Marker mClickMarker;
private List waypointList = new ArrayList<>();
private List mLatLng = new ArrayList<>();
private List mPointInfo = new ArrayList<>();
public static WaypointMission.Builder waypointMissionBuilder;
private FlightController mFlightController;
private WaypointMissionOperator instance;
private WaypointMissionFinishedAction mFinishedAction = WaypointMissionFinishedAction.NO_ACTION;
private WaypointMissionHeadingMode mHeadingMode = WaypointMissionHeadingMode.AUTO;
private SQLiteHelper mSQLiteHelper;
private String FinishedAction, HeadingMode;
//自定义窗体
View infoWindow = null;
int speed_RG_id = 0;
int actionAfterFinished_RG_id = 0;
int heading_RG_id = 0;
//kim
static ReadKml readKml = new ReadKml();
private static List sampleList = readKml.getCoordinateList();
@Override
public void initViews() {
mLinearLayout.setVisibility(View.VISIBLE);
mTextViewToolbarTitle.setText("航线规划");
IntentFilter filter = new IntentFilter();
filter.addAction(ReceiverApplication.FLAG_CONNECTION_CHANGE);
registerReceiver(mReceiver, filter);
mMapView = findViewById(R.id.map);
mMapView.onCreate(InstanceState);
initMapView();
addListener();
onProductConnectionChange();
}
@Override
protected void onResume() {
super.onResume();
initFlightController();
mMapView.onResume();
}
/**
* 方法必须重写
*/
@Override
protected void onSaveInstanceState(Bundle outState) {
super.onSaveInstanceState(outState);
mMapView.onSaveInstanceState(outState);
}
@Override
protected void onPause() {
super.onPause();
mMapView.onPause();
deactivate();
}
@Override
protected void onDestroy() {
super.onDestroy();
unregisterReceiver(mReceiver);
removeListener();
mMapView.onDestroy();
if (null != mlocationClient) {
mlocationClient.onDestroy();
}
}
@Override
public void initDatas() {
}
@Override
protected void requestData() {
}
private void initMapView() {
if (aMap == null) {
aMap = mMapView.getMap();
mUiSettings = aMap.getUiSettings();
mUiSettings.setMyLocationButtonEnabled(true);
mUiSettings.setScaleControlsEnabled(true);
aMap.setOnMapClickListener(this);// add the listener for click for amap object
aMap.setLocationSource(this);
aMap.setMyLocationEnabled(true);
aMap.setInfoWindowAdapter(this);
aMap.setOnMarkerClickListener(this);
setupLocationStyle();
}
}
private void setupLocationStyle() {
// 自定义系统定位蓝点
MyLocationStyle myLocationStyle = new MyLocationStyle();
// 自定义定位蓝点图标
myLocationStyle.myLocationIcon(BitmapDescriptorFactory.
fromResource(R.mipmap.icv_gps_point_36dp));
// 自定义精度范围的圆形边框颜色
myLocationStyle.strokeColor(Color.parseColor("#00000000"));
//自定义精度范围的圆形边框宽度
myLocationStyle.strokeWidth(5);
// 设置圆形的填充颜色
myLocationStyle.radiusFillColor(Color.parseColor("#00000000"));
// 将自定义的 myLocationStyle 对象添加到地图上
aMap.setMyLocationStyle(myLocationStyle);
}
@OnClick({R.id.img_kml_input, R.id.img_setting_route, R.id.img_start_fly, R.id.btn_delete,
R.id.img_setting_clear, R.id.btn_finish, R.id.btn_setting, R.id.btn_upload,
R.id.btn_start, R.id.btn_stop, R.id.img_back})
@Override
public void onClick(View v) {
switch (v.getId()) {
case R.id.img_back:
SettingRouteActivity.this.finish();
break;
case R.id.img_kml_input:
Intent intent = new Intent(Intent.ACTION_GET_CONTENT);
intent.setType("*/*");//设置类型,我这里是任意类型,任意后缀的可以这样写。
intent.addCategory(Intent.CATEGORY_OPENABLE);
startActivityForResult(intent, MyStatic.REQUEST_CODE_FILE);
break;
case R.id.img_setting_route:
enableDisableAdd();
break;
case R.id.img_setting_clear:
runOnUiThread(new Runnable() {
@Override
public void run() {
aMap.clear();
mMarkers.clear();
mPointInfo.clear();
mLinearLayoutInformation.setVisibility(View.GONE);
mButtonFinish.setVisibility(View.GONE);
mButtonSetting.setVisibility(View.GONE);
mButtonUpload.setVisibility(View.GONE);
mButtonStart.setVisibility(View.GONE);
mButtonStop.setVisibility(View.GONE);
}
});
waypointList.clear();
waypointMissionBuilder.waypointList(waypointList);
break;
case R.id.img_start_fly:
atyAction(WaypointActivity.class, MyStatic.REQUEST_CODE_ID);
break;
case R.id.btn_delete:
runOnUiThread(new Runnable() {
@Override
public void run() {
aMap.clear();
}
});
for (int i = 0; i < mMarkers.size(); i++) {
if (mMarkers.get(i).getTitle().equals(mClickMarker.getTitle())) {
for (int j = i; j < mMarkers.size() - 1; j++) {
mMarkers.put(j, mMarkers.get(j + 1));
}
mMarkers.remove(mMarkers.size() - 1);
}
}
for (int i = 0; i < mMarkers.size(); i++) {
mMarkers.get(i).setTitle("航点" + (i + 1));
}
updateMarkWaypoint();
break;
case R.id.btn_finish:
MyLog.d("航点数:" + waypointMissionBuilder.getWaypointCount());
MyLog.d("总距离:" + waypointMissionBuilder.calculateTotalDistance());
MyLog.d("总时间:" + waypointMissionBuilder.calculateTotalTime());
isAdd = false;
mButtonFinish.setVisibility(View.GONE);
mButtonSetting.setVisibility(View.VISIBLE);
mButtonUpload.setVisibility(View.VISIBLE);
showSettingDialog();
break;
case R.id.btn_setting:
showSettingDialog();
break;
case R.id.btn_upload:
uploadWayPointMission();
break;
case R.id.btn_start:
startWaypointMission();
break;
case R.id.btn_stop:
stopWaypointMission();
break;
}
}
private void enableDisableAdd() {
if (isAdd == false) {
isAdd = true;
mButtonFinish.setVisibility(View.VISIBLE);
} else {
isAdd = false;
}
}
private void initFlightController() {
BaseProduct product = ReceiverApplication.getProductInstance();
if (product != null && product.isConnected()) {
if (product instanceof Aircraft) {
mFlightController = ((Aircraft) product).getFlightController();
}
}
if (mFlightController != null) {
mFlightController.setStateCallback(
new FlightControllerState.Callback() {
@Override
public void onUpdate(FlightControllerState
djiFlightControllerCurrentState) {
if (djiFlightControllerCurrentState.getAircraftLocation().getLatitude() != 0.0 && djiFlightControllerCurrentState.getAircraftLocation().getLongitude() != 0.0) {
D_latitude = djiFlightControllerCurrentState.getAircraftLocation().getLatitude();
D_longitude = djiFlightControllerCurrentState.getAircraftLocation().getLongitude();
}
updateDroneLocation();
}
});
}
}
private void updateDroneLocation() {
LatLng pos = new LatLng(D_latitude, D_longitude);
//Create MarkerOptions object
final MarkerOptions markerOptions = new MarkerOptions();
markerOptions.position(pos);
markerOptions.icon(BitmapDescriptorFactory.fromResource(R.mipmap.ic_aircraft_write_36dp));
runOnUiThread(new Runnable() {
@Override
public void run() {
if (droneMarker != null) {
droneMarker.remove();
}
if (checkGpsCoordination(D_latitude, D_longitude)) {
droneMarker = aMap.addMarker(markerOptions);
}
}
});
}
public static boolean checkGpsCoordination(double latitude, double longitude) {
return (latitude > -90 && latitude < 90 && longitude > -180 && longitude < 180) && (latitude != 0f && longitude != 0f);
}
protected BroadcastReceiver mReceiver = new BroadcastReceiver() {
@Override
public void onReceive(Context context, Intent intent) {
onProductConnectionChange();
}
};
private void onProductConnectionChange() {
initFlightController();
}
private void addListener() {
if (getWaypointMissionOperator() != null) {
getWaypointMissionOperator().addListener(eventNotificationListener);
}
}
private void removeListener() {
if (getWaypointMissionOperator() != null) {
getWaypointMissionOperator().removeListener(eventNotificationListener);
}
}
private WaypointMissionOperatorListener eventNotificationListener = new WaypointMissionOperatorListener() {
@Override
public void onDownloadUpdate(WaypointMissionDownloadEvent downloadEvent) {
}
@Override
public void onUploadUpdate(WaypointMissionUploadEvent uploadEvent) {
}
@Override
public void onExecutionUpdate(WaypointMissionExecutionEvent executionEvent) {
}
@Override
public void onExecutionStart() {
}
@Override
public void onExecutionFinish(@Nullable final DJIError error) {
showToasts("Execution finished: " + (error == null ? "Success!" : error.getDescription()));
}
};
public WaypointMissionOperator getWaypointMissionOperator() {
if (instance == null) {
instance = DJISDKManager.getInstance().getMissionControl().getWaypointMissionOperator();
}
return instance;
}
@Override
public void onMapClick(LatLng point) {
if (isAdd == true) {
markWaypoint(point);
Waypoint mWaypoint = new Waypoint(point.latitude, point.longitude, altitude);
//Add Waypoints to Waypoint arraylist;
if (waypointMissionBuilder != null) {
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
} else {
waypointMissionBuilder = new WaypointMission.Builder();
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
}
mTextViewCount.setText("航点数:" + waypointMissionBuilder.getWaypointCount());
mTextViewDistance.setText("总距离:" + Math.round(waypointMissionBuilder.calculateTotalDistance()) + "m");
mTextViewTime.setText("总时间:" + Math.round(waypointMissionBuilder.calculateTotalTime()) + "min");
} else {
if (mClickMarker != null && mClickMarker.isInfoWindowShown()) {
mClickMarker.hideInfoWindow();
mButtonDelete.setVisibility(View.GONE);
}
// showToasts("当前未开启增加点模式");
}
}
private void markWaypoint(LatLng point) {
MarkerOptions markerOptions = new MarkerOptions();
markerOptions.position(point);
mPointInfo.add(new PointInfo(point.latitude, point.longitude));
markerOptions.title("航点" + (mMarkers.size() + 1));
markerOptions.snippet("事件:");
markerOptions.icon(BitmapDescriptorFactory.defaultMarker(BitmapDescriptorFactory.HUE_BLUE));
markerOptions.infoWindowEnable(true);
Marker marker = aMap.addMarker(markerOptions);
mMarkers.put(mMarkers.size(), marker);
marker.showInfoWindow();
if (mMarkers.size() > 0) {
mLatLng.clear();
PolylineOptions PolylineOptions = new PolylineOptions();
for (int i = 0; i < mMarkers.size(); i++) {
mLatLng.add(mMarkers.get(i).getPosition());
}
PolylineOptions.addAll(mLatLng);
PolylineOptions.width(10);
PolylineOptions.color(Color.argb(255, 1, 1, 1));
aMap.addPolyline(PolylineOptions);
}
}
private void updateMarkWaypoint() {
mLatLng.clear();
waypointList.clear();
mPointInfo.clear();
waypointMissionBuilder.waypointList(waypointList);
for (int i = 0; i < mMarkers.size(); i++) {
mPointInfo.add(new PointInfo(mMarkers.get(i).getPosition().latitude, mMarkers.get(i).getPosition().longitude));
MarkerOptions markerOptions = new MarkerOptions();
Waypoint mWaypoint = new Waypoint(mMarkers.get(i).getPosition().latitude, mMarkers.get(i).getPosition().longitude, altitude);
waypointList.add(mWaypoint);
markerOptions.position(mMarkers.get(i).getPosition());
markerOptions.title(mMarkers.get(i).getTitle());
markerOptions.snippet(mMarkers.get(i).getSnippet());
markerOptions.icon(BitmapDescriptorFactory.defaultMarker(BitmapDescriptorFactory.HUE_BLUE));
aMap.addMarker(markerOptions);
mLatLng.add(mMarkers.get(i).getPosition());
}
if (mMarkers.size() > 0) {
PolylineOptions PolylineOptions = new PolylineOptions();
PolylineOptions.addAll(mLatLng);
PolylineOptions.width(10);
PolylineOptions.color(Color.argb(255, 1, 1, 1));
aMap.addPolyline(PolylineOptions);
}
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
mTextViewCount.setText("航点数:" + waypointMissionBuilder.getWaypointCount());
mTextViewDistance.setText("总距离:" + Math.round(waypointMissionBuilder.calculateTotalDistance()) + "m");
mTextViewTime.setText("总时间:" + Math.round(waypointMissionBuilder.calculateTotalTime()) + "min");
MyLog.d("航点数:" + waypointMissionBuilder.getWaypointCount());
MyLog.d("总距离:" + waypointMissionBuilder.calculateTotalDistance());
MyLog.d("总时间:" + waypointMissionBuilder.calculateTotalTime());
mButtonDelete.setVisibility(View.GONE);
}
/**
* 定位成功后回调函数
*/
@Override
public void onLocationChanged(AMapLocation amapLocation) {
if (mListener != null && amapLocation != null) {
if (amapLocation != null
&& amapLocation.getErrorCode() == 0) {
D_latitude = amapLocation.getLatitude(); //获取纬度
D_longitude = amapLocation.getLongitude(); //获取经度
mListener.onLocationChanged(amapLocation);// 显示系统小蓝点
aMap.moveCamera(CameraUpdateFactory.zoomTo(18));
} else {
String errText = "定位失败," + amapLocation.getErrorCode() + ": " + amapLocation.getErrorInfo();
Log.e("AmapErr", errText);
}
}
}
@Override
public void activate(OnLocationChangedListener listener) {
mListener = listener;
if (mlocationClient == null) {
try {
mlocationClient = new AMapLocationClient(this);
} catch (Exception e) {
e.printStackTrace();
}
mLocationOption = new AMapLocationClientOption();
//设置定位监听
mlocationClient.setLocationListener(this);
//设置为高精度定位模式
mLocationOption.setLocationMode(AMapLocationClientOption.AMapLocationMode.Hight_Accuracy);
//设置定位参数
mLocationOption.setOnceLocation(true);
mlocationClient.setLocationOption(mLocationOption);
// 此方法为每隔固定时间会发起一次定位请求,为了减少电量消耗或网络流量消耗,
// 注意设置合适的定位时间的间隔(最小间隔支持为2000ms),并且在合适时间调用stopLocation()方法来取消定位请求
// 在定位结束后,在合适的生命周期调用onDestroy()方法
// 在单次定位情况下,定位无论成功与否,都无需调用stopLocation()方法移除请求,定位sdk内部会移除
mlocationClient.startLocation();
}
}
@Override
public void deactivate() {
mListener = null;
if (mlocationClient != null) {
mlocationClient.stopLocation();
mlocationClient.onDestroy();
}
mlocationClient = null;
}
@Override
public View getInfoWindow(Marker marker) {
if (infoWindow == null) {
infoWindow = LayoutInflater.from(this).inflate(R.layout.amap_info_window, null);
}
render(marker, infoWindow);
return infoWindow;
}
/**
* 自定义infoWindow窗口
*/
private void render(Marker marker, View infoWindow) {
TextView title = infoWindow.findViewById(R.id.info_window_title);
TextView content = infoWindow.findViewById(R.id.info_window_content);
title.setText(marker.getTitle());
content.setText(marker.getSnippet());
}
@Override
public View getInfoContents(Marker marker) {
return null;
}
@Override
public boolean onMarkerClick(Marker marker) {
marker.showInfoWindow();
mClickMarker = marker;
mButtonDelete.setVisibility(View.VISIBLE);
// aMap.moveCamera(CameraUpdateFactory.newCameraPosition(new CameraPosition(marker.getPosition(),18,0,0)));
return true;
}
private void showSettingDialog() {
LinearLayout wayPointSettings = (LinearLayout) getLayoutInflater().inflate(R.layout.dialog_waypointsetting, null);
final TextView wpAltitude_TV = (TextView) wayPointSettings.findViewById(R.id.altitude);
RadioGroup speed_RG = (RadioGroup) wayPointSettings.findViewById(R.id.speed);
RadioGroup actionAfterFinished_RG = (RadioGroup) wayPointSettings.findViewById(R.id.actionAfterFinished);
RadioGroup heading_RG = (RadioGroup) wayPointSettings.findViewById(R.id.heading);
wpAltitude_TV.setText(Math.round(altitude) + "");
if (speed_RG_id != 0) {
RadioButton radioButton = (RadioButton) speed_RG.findViewById(speed_RG_id);
radioButton.setChecked(true);
}
if (actionAfterFinished_RG_id != 0) {
RadioButton radioButton = (RadioButton) actionAfterFinished_RG.findViewById(actionAfterFinished_RG_id);
radioButton.setChecked(true);
}
if (heading_RG_id != 0) {
RadioButton radioButton = (RadioButton) heading_RG.findViewById(heading_RG_id);
radioButton.setChecked(true);
}
speed_RG.setOnCheckedChangeListener(new RadioGroup.OnCheckedChangeListener() {
@Override
public void onCheckedChanged(RadioGroup group, int checkedId) {
if (checkedId == R.id.lowSpeed) {
mSpeed = 3.0f;
} else if (checkedId == R.id.MidSpeed) {
mSpeed = 5.0f;
} else if (checkedId == R.id.HighSpeed) {
mSpeed = 10.0f;
}
speed_RG_id = checkedId;
}
});
actionAfterFinished_RG.setOnCheckedChangeListener(new RadioGroup.OnCheckedChangeListener() {
@Override
public void onCheckedChanged(RadioGroup group, int checkedId) {
MyLog.d("选择动作完成");
if (checkedId == R.id.finishNone) {
mFinishedAction = WaypointMissionFinishedAction.NO_ACTION;
FinishedAction = "0";
} else if (checkedId == R.id.finishGoHome) {
mFinishedAction = WaypointMissionFinishedAction.GO_HOME;
FinishedAction = "1";
} else if (checkedId == R.id.finishAutoLanding) {
mFinishedAction = WaypointMissionFinishedAction.AUTO_LAND;
FinishedAction = "2";
} else if (checkedId == R.id.finishToFirst) {
mFinishedAction = WaypointMissionFinishedAction.GO_FIRST_WAYPOINT;
FinishedAction = "3";
}
actionAfterFinished_RG_id = checkedId;
}
});
heading_RG.setOnCheckedChangeListener(new RadioGroup.OnCheckedChangeListener() {
@Override
public void onCheckedChanged(RadioGroup group, int checkedId) {
MyLog.d("选择标题");
if (checkedId == R.id.headingNext) {
mHeadingMode = WaypointMissionHeadingMode.AUTO;
HeadingMode = "0";
} else if (checkedId == R.id.headingInitDirec) {
mHeadingMode = WaypointMissionHeadingMode.USING_INITIAL_DIRECTION;
HeadingMode = "1";
} else if (checkedId == R.id.headingRC) {
mHeadingMode = WaypointMissionHeadingMode.CONTROL_BY_REMOTE_CONTROLLER;
HeadingMode = "2";
} else if (checkedId == R.id.headingWP) {
mHeadingMode = WaypointMissionHeadingMode.USING_WAYPOINT_HEADING;
HeadingMode = "3";
}
heading_RG_id = checkedId;
}
});
new AlertDialog.Builder(this)
.setTitle("航点设置")
.setView(wayPointSettings)
.setNeutralButton("设置", new DialogInterface.OnClickListener() {
public void onClick(DialogInterface dialog, int id) {
String altitudeString = wpAltitude_TV.getText().toString();
altitude = Integer.parseInt(nulltoIntegerDefalt(altitudeString));
MyLog.e("altitude " + altitude);
MyLog.e("speed " + mSpeed);
MyLog.e("mFinishedAction " + mFinishedAction);
MyLog.e("mHeadingMode " + mHeadingMode);
configWayPointMission();
}
})
.setCancelable(false)
.create()
.show();
}
String nulltoIntegerDefalt(String value) {
if (!isIntValue(value))
value = "0";
return value;
}
boolean isIntValue(String val) {
try {
val = val.replace(" ", "");
Integer.parseInt(val);
} catch (Exception e) {
return false;
}
return true;
}
private void configWayPointMission() {
if (waypointMissionBuilder == null) {
waypointMissionBuilder = new WaypointMission.Builder().finishedAction(mFinishedAction)
.headingMode(mHeadingMode)
.autoFlightSpeed(mSpeed)
.maxFlightSpeed(mSpeed)
.flightPathMode(WaypointMissionFlightPathMode.NORMAL);
} else {
waypointMissionBuilder.finishedAction(mFinishedAction)
.headingMode(mHeadingMode)
.autoFlightSpeed(mSpeed)
.maxFlightSpeed(mSpeed)
.flightPathMode(WaypointMissionFlightPathMode.NORMAL);
}
if (waypointMissionBuilder.getWaypointList().size() > 0) {
for (int i = 0; i < waypointMissionBuilder.getWaypointList().size(); i++) {
waypointMissionBuilder.getWaypointList().get(i).altitude = altitude;
}
}
DJIError error = getWaypointMissionOperator().loadMission(waypointMissionBuilder.build());
if (error == null) {
if (mLinearLayoutInformation.getVisibility() == View.GONE) {
mLinearLayoutInformation.setVisibility(View.VISIBLE);
}
mTextViewHeight.setText("高度:" + altitude + "m");
mTextViewSpeed.setText("速度:" + mSpeed + "m/s");
mTextViewCount.setText("航点数:" + waypointMissionBuilder.getWaypointCount());
mTextViewDistance.setText("总距离:" + Math.round(waypointMissionBuilder.calculateTotalDistance()) + "m");
mTextViewTime.setText("总时间:" + Math.round(waypointMissionBuilder.calculateTotalTime()) + "min");
MyLog.d("航点数:" + waypointMissionBuilder.getWaypointCount());
MyLog.d("总距离:" + waypointMissionBuilder.calculateTotalDistance());
MyLog.d("总时间:" + waypointMissionBuilder.calculateTotalTime());
showToasts("航路点配置成功");
} else {
showToasts("航路点配置失败 " + error.getDescription());
}
}
private void uploadWayPointMission() {
getWaypointMissionOperator().uploadMission(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError error) {
if (error == null) {
runOnUiThread(new Runnable() {
@Override
public void run() {
mButtonSetting.setVisibility(View.GONE);
mButtonUpload.setVisibility(View.GONE);
mButtonStart.setVisibility(View.VISIBLE);
mButtonStop.setVisibility(View.VISIBLE);
}
});
showToasts("任务上传成功!");
mSQLiteHelper = new SQLiteHelper(SettingRouteActivity.this);
MyLog.d("航点值:" + GsonUtil.GsonString(mPointInfo));
mSQLiteHelper.doInsert(GsonUtil.GsonString(mPointInfo), altitude, mSpeed, HeadingMode, FinishedAction,
waypointMissionBuilder.getWaypointCount(), Math.round(waypointMissionBuilder.calculateTotalDistance()),
Math.round(waypointMissionBuilder.calculateTotalTime()), DateUtils.getCurrentDate());
mSQLiteHelper.close();
} else {
showToasts("任务上传失败, error: " + error.getDescription() + " retrying...");
getWaypointMissionOperator().retryUploadMission(null);
}
}
});
}
private void startWaypointMission() {
getWaypointMissionOperator().startMission(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError error) {
showToasts("任务开始: " + (error == null ? "成功" : "失败:" + error.getDescription()));
}
});
}
private void stopWaypointMission() {
getWaypointMissionOperator().stopMission(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError error) {
showToasts("任务暂停: " + (error == null ? "成功" : "失败" + error.getDescription()));
}
});
}
@Override
protected void onActivityResult(int requestCode, int resultCode, Intent data) {
switch (requestCode) {
case 101:
int Id = data.getExtras().getInt("id");
MyLog.d("返回的ID:" + Id);
if (Id > -1) {
refreshMapPoint(Id);
}
break;
case 102:
if (data.getData() != null) {
Uri uri = data.getData();//得到uri,后面就是将uri转化成file的过程。
String img_path = uri.getPath();
try {
if (!TextUtils.isEmpty(img_path)) {
readKml.parseKml(img_path);
addSampleMarker();
}
} catch (Exception e) {
e.printStackTrace();
}
}
break;
default:
break;
}
}
private void refreshMapPoint(int id) {
aMap.clear();
mMarkers.clear();
mPointInfo.clear();
mLinearLayoutInformation.setVisibility(View.GONE);
mButtonFinish.setVisibility(View.GONE);
mButtonSetting.setVisibility(View.GONE);
mButtonUpload.setVisibility(View.GONE);
mButtonStart.setVisibility(View.GONE);
mButtonStop.setVisibility(View.GONE);
waypointList.clear();
mSQLiteHelper = new SQLiteHelper(SettingRouteActivity.this);
Cursor c = mSQLiteHelper.doSelectWaypoint(id);
if (c != null) {
if (c.moveToNext()) {
MyLog.d("航点:" + "{'pointInfo':" + c.getString(1) + "}");
mPointInfo.addAll(GsonUtil.GsonToBean("{'pointInfo':" + c.getString(1) + "}", Root.class).getPointInfo());
altitude = c.getFloat(2);
mSpeed = c.getFloat(3);
switch (c.getString(4)) {
case "0":
mHeadingMode = WaypointMissionHeadingMode.AUTO;
break;
case "1":
mHeadingMode = WaypointMissionHeadingMode.USING_INITIAL_DIRECTION;
break;
case "2":
mHeadingMode = WaypointMissionHeadingMode.CONTROL_BY_REMOTE_CONTROLLER;
break;
case "3":
mHeadingMode = WaypointMissionHeadingMode.USING_WAYPOINT_HEADING;
break;
case "4":
mHeadingMode = WaypointMissionHeadingMode.TOWARD_POINT_OF_INTEREST;
break;
}
switch (c.getString(5)) {
case "0":
mFinishedAction = WaypointMissionFinishedAction.NO_ACTION;
break;
case "1":
mFinishedAction = WaypointMissionFinishedAction.GO_HOME;
break;
case "2":
mFinishedAction = WaypointMissionFinishedAction.AUTO_LAND;
break;
case "3":
mFinishedAction = WaypointMissionFinishedAction.GO_FIRST_WAYPOINT;
break;
case "4":
mFinishedAction = WaypointMissionFinishedAction.CONTINUE_UNTIL_END;
break;
}
}
}
for (int i = 0; i < mPointInfo.size(); i++) {
showWaypoint(new LatLng(mPointInfo.get(i).getLatitude(), mPointInfo.get(i).getLongitude()));
Waypoint mWaypoint = new Waypoint(mPointInfo.get(i).getLatitude(), mPointInfo.get(i).getLongitude(), altitude);
if (waypointMissionBuilder != null) {
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
} else {
waypointMissionBuilder = new WaypointMission.Builder();
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
}
}
aMap.moveCamera(CameraUpdateFactory.newCameraPosition(new CameraPosition(new LatLng(mPointInfo.get(0).getLatitude(), mPointInfo.get(0).getLongitude()), 18, 0, 0)));
ResultconfigWayPointMission();
getWaypointMissionOperator().uploadMission(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
if (djiError == null) {
showToasts("获取任务成功!");
}
}
});
}
private void showWaypoint(LatLng point) {
MarkerOptions markerOptions = new MarkerOptions();
markerOptions.position(point);
markerOptions.title("航点" + (mMarkers.size() + 1));
markerOptions.snippet("事件:");
markerOptions.icon(BitmapDescriptorFactory.defaultMarker(BitmapDescriptorFactory.HUE_BLUE));
markerOptions.infoWindowEnable(true);
Marker marker = aMap.addMarker(markerOptions);
mMarkers.put(mMarkers.size(), marker);
marker.showInfoWindow();
if (mMarkers.size() > 0) {
mLatLng.clear();
PolylineOptions PolylineOptions = new PolylineOptions();
for (int i = 0; i < mMarkers.size(); i++) {
mLatLng.add(mMarkers.get(i).getPosition());
}
PolylineOptions.addAll(mLatLng);
PolylineOptions.width(10);
PolylineOptions.color(Color.argb(255, 1, 1, 1));
aMap.addPolyline(PolylineOptions);
}
}
private void ResultconfigWayPointMission() {
if (waypointMissionBuilder == null) {
waypointMissionBuilder = new WaypointMission.Builder().finishedAction(mFinishedAction)
.headingMode(mHeadingMode)
.autoFlightSpeed(mSpeed)
.maxFlightSpeed(mSpeed)
.flightPathMode(WaypointMissionFlightPathMode.NORMAL);
} else {
waypointMissionBuilder.finishedAction(mFinishedAction)
.headingMode(mHeadingMode)
.autoFlightSpeed(mSpeed)
.maxFlightSpeed(mSpeed)
.flightPathMode(WaypointMissionFlightPathMode.NORMAL);
}
if (waypointMissionBuilder.getWaypointList().size() > 0) {
for (int i = 0; i < waypointMissionBuilder.getWaypointList().size(); i++) {
waypointMissionBuilder.getWaypointList().get(i).altitude = altitude;
}
}
DJIError error = getWaypointMissionOperator().loadMission(waypointMissionBuilder.build());
if (error == null) {
if (mLinearLayoutInformation.getVisibility() == View.GONE) {
mLinearLayoutInformation.setVisibility(View.VISIBLE);
}
mButtonStart.setVisibility(View.VISIBLE);
mButtonStop.setVisibility(View.VISIBLE);
mTextViewHeight.setText("高度:" + altitude + "m");
mTextViewSpeed.setText("速度:" + mSpeed + "m/s");
mTextViewCount.setText("航点数:" + waypointMissionBuilder.getWaypointCount());
mTextViewDistance.setText("总距离:" + Math.round(waypointMissionBuilder.calculateTotalDistance()) + "m");
mTextViewTime.setText("总时间:" + Math.round(waypointMissionBuilder.calculateTotalTime()) + "min");
}
}
private void addSampleMarker() {
if (ReadKml.addSampleSuccess) {
aMap.clear();
mMarkers.clear();
mPointInfo.clear();
waypointList.clear();
if (mLinearLayoutInformation.getVisibility() == View.VISIBLE) {
mLinearLayoutInformation.setVisibility(View.GONE);
}
mButtonFinish.setVisibility(View.GONE);
mButtonSetting.setVisibility(View.GONE);
mButtonUpload.setVisibility(View.GONE);
mButtonStart.setVisibility(View.GONE);
mButtonStop.setVisibility(View.GONE);
for (int i = 0; i < sampleList.size(); i++) {
showWaypoint(new LatLng(sampleList.get(i).getX(), sampleList.get(i).getY()));
Waypoint mWaypoint = new Waypoint(sampleList.get(i).getX(), sampleList.get(i).getY(), altitude);
//Add Waypoints to Waypoint arraylist;
if (waypointMissionBuilder != null) {
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
} else {
waypointMissionBuilder = new WaypointMission.Builder();
waypointList.add(mWaypoint);
waypointMissionBuilder.waypointList(waypointList).waypointCount(waypointList.size());
}
}
aMap.moveCamera(CameraUpdateFactory.newCameraPosition(new CameraPosition(new LatLng(sampleList.get(0).getX(), sampleList.get(0).getY()), 18, 0, 0)));
showSettingDialog();
mButtonSetting.setVisibility(View.VISIBLE);
mButtonUpload.setVisibility(View.VISIBLE);
} else {
Log.d("MainActivity", "addSampleSuccess is false or aMap is null");
}
}
3
创建activity_waypoint.xml和WaypointActivity文件。
activity_waypoint.xml
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
tools:context=".ui.WaypointActivity"
android:orientation="vertical"
android:background="@drawable/shape_corner_eight">
<include
android:id="@+id/layout_waypoint"
layout="@layout/activity_toolbar">include>
<View
android:layout_width="match_parent"
android:layout_height="1dp"
android:background="#5B6782"
android:layout_marginTop="1dp"
android:layout_marginRight="20dp"
android:layout_marginLeft="20dp"
>View>
<androidx.recyclerview.widget.RecyclerView
android:id="@+id/rv_waypoint"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:layout_marginRight="20dp"
android:layout_marginLeft="20dp">androidx.recyclerview.widget.RecyclerView>
LinearLayout>WaypointActivity
@Layout(R.layout.activity_waypoint)
public class WaypointActivity extends BaseActivity implements View.OnClickListener {
@BindView(R.id.layout_waypoint)
View mViewLayoutToolbar;
@BindView(R.id.ll_waypoint)
LinearLayout mLinearLayout;
@BindView(R.id.tv_toolbar_title)
TextView mTextViewToolbarTitle;
@BindView(R.id.rv_waypoint)
RecyclerView mRecyclerView;
private SQLiteHelper mSQLiteHelper;
private List mWaypointInfo = new ArrayList<>();
private WaypointAdapter mWaypointAdapter;
private List mWaypointId = new ArrayList<>();
private String StrId = "";
@Override
public void initViews() {
mLinearLayout.setVisibility(View.VISIBLE);
mTextViewToolbarTitle.setText("航线管理");
MyStatic.isChoose = false;
}
@Override
public void initDatas() {
mSQLiteHelper = new SQLiteHelper(WaypointActivity.this);
Cursor c = mSQLiteHelper.doSelect();
if (c!=null){
while (c.moveToNext()){
mWaypointInfo.add(new WaypointInfo(c.getInt(0),c.getString(1),c.getFloat(2),c.getFloat(3),
c.getString(4),c.getString(5),c.getString(6),c.getInt(7),c.getInt(8),
c.getInt(9),c.getString(10)));
}
}
c.close();
mSQLiteHelper.close();
mWaypointAdapter = new WaypointAdapter(R.layout.item_waypoint);
mWaypointAdapter.setNewData(mWaypointInfo);
initRv(mRecyclerView,mWaypointAdapter);
mWaypointAdapter.setOnItemChildClickListener(new BaseQuickAdapter.OnItemChildClickListener() {
@Override
public void onItemChildClick(BaseQuickAdapter adapter, View view, int position) {
Intent intent = new Intent();
intent.putExtra("id", mWaypointInfo.get(position).getId());
setResult(RESULT_OK, intent);
finish();
}
});
mWaypointAdapter.setOnCheckboxCheckedListener(new WaypointAdapter.OnCheckboxCheckedListener() {
@Override
public void OnCheckboxChecked(boolean isCheck, int position) {
if (isCheck){
mWaypointId.add(position);
}else {
if (mWaypointId.contains(position)){
mWaypointId.remove(position);
}
}
}
});
}
@Override
protected void requestData() {
}
@OnClick({R.id.img_way_choose,R.id.img_way_delete,R.id.img_back})
@Override
public void onClick(View v) {
switch (v.getId()){
case R.id.img_way_choose:
if (MyStatic.isChoose){
MyStatic.isChoose = false;
}else {
MyStatic.isChoose = true;
}
if (mWaypointAdapter!=null){
mWaypointAdapter.notifyDataSetChanged();
}
break;
case R.id.img_way_delete:
if (mWaypointId.size() > 0){
for (int i = 0; i < mWaypointId.size(); i++){
StrId += mWaypointInfo.get(mWaypointId.get(i)).getId()+",";
}
if (!TextUtils.isEmpty(StrId)){
StrId = StrId.substring(0,StrId.length()-1);
mSQLiteHelper = new SQLiteHelper(WaypointActivity.this);
mSQLiteHelper.doDelete(StrId);
mSQLiteHelper.close();
for (int j = 0; j < mWaypointId.size(); j++){
mWaypointInfo.remove(mWaypointId.get(j).intValue());
}
if (mWaypointAdapter!=null){
mWaypointId.clear();
MyStatic.isChoose = false;
mWaypointAdapter.setNewData(mWaypointInfo);
}
}
}else {
showToasts("请先选择删除的航线!");
}
break;
case R.id.img_back:
Intent intent = new Intent();
intent.putExtra("id", -1);
setResult(RESULT_OK, intent);
finish();
break;
}
}
以上代码仅供参考,如果想了解更多的大疆无人机二次开发过程可以私信我,源代码因为涉及到商业使用不能给大家共享,有什么问题我可以帮你解决。
 往期推荐
往期推荐毕业设计So Easy:基于C++实现网络扫描器
详解CAN总线:CAN节点硬件构成方案
LabVIEW串口通信
LabVIEW感兴趣区域分析(实战篇—1)
Python Qt GUI设计:信号与槽的使用方法(基础篇—7)
和12岁小同志搞创客开发:如何使用继电器?
PCB天线无线模组如何布局摆放?
芯片内部长啥样?牛人用1500张照片,一层一层放给你看!
移柯L620模组使用MQTT协议连接移动OneNet云平台



