关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯
成本:


BEV:
Bird's Eye View, 将摄像头提取到的图像信息输入至神经网络以提取特征,再利用基于自注意力机制的Transformer算法将结果进行拼接,最终形成俯视鸟瞰图。将多个传感器生成的特征转换到统一的坐标系下,再将其合并到一起,更贴近实际物理世界。
Transformer:
Transformer网格结构借鉴人脑的注意力机制组成,处理大量信息是能够只选择一些关键信息进行处理,以提升神经网络效率。Transformer较传统CNN模型饱和区间很大,因此更适宜于大规模数据训练的需求。
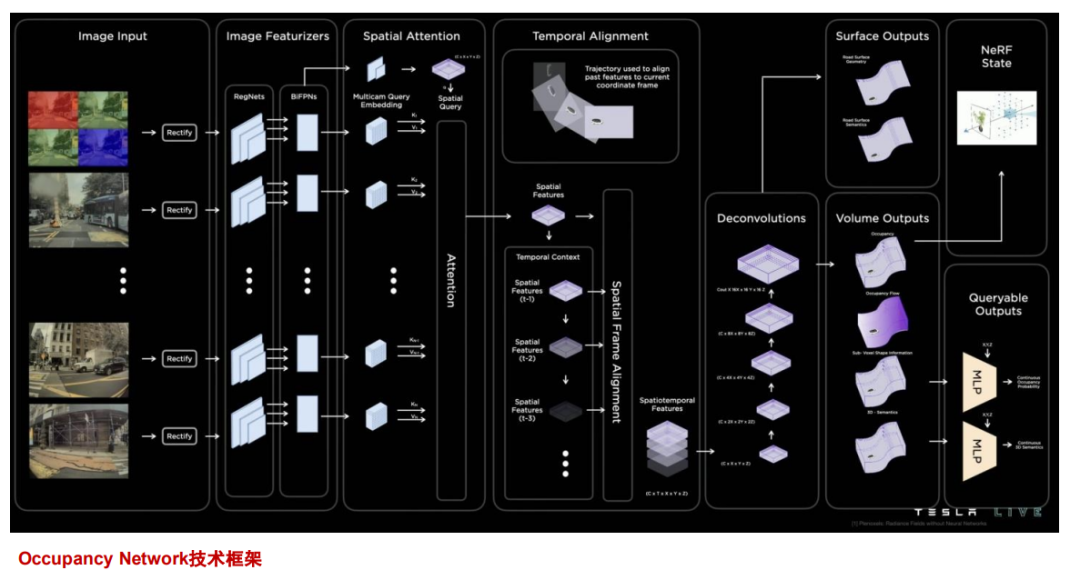
栅格网络:
Occupancy Network 在BEV基础上添加Z轴,将BEV的2D栅格变为3D,实现3D空间重建



MEMS:
micro-electromechanical system微振镜,对于振动相对敏感,因此需要研发隔离振动技术。核心结构是尺寸很小的悬臂梁结构,通过驱动扭杆使得MEMS微振镜进行振荡扭转,从而对激光进行反射,仅需要少量激光探测器即可完成高线束的扫描效果,因此体积较小、成本可控。
MEMS激光雷达想要提升性能可以考虑增大振镜尺寸。但镜面尺寸变大后,成本会明显上升,且支撑振镜的两根扭杆也更加容易断裂,因此需研发隔离振动技术。
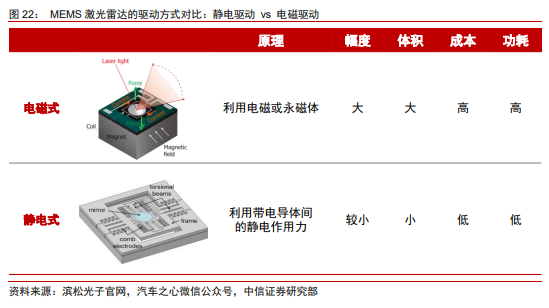
MEMS通常有电磁驱动和静电驱动两种方式,电磁驱动的驱动力来自于电磁或永磁体(Magnet),需要有数十微米厚度的电磁线圈,封装需要配置永磁铁;而静电驱动则是利用带电导体(电极板)间的静电作用力。
静电驱动方式更成熟,封装简单,体积小且功耗低,但电磁驱动能够将悬臂梁的强度做得更高,以提升可靠性,同时实现更大的扫描角度。
采用1550nm波长,通过改变发射端而非扫描段也可提升激光雷达的性能,确保可靠性,但同时,1550nm带来的成本和功耗也会增加。
1550nm光源在人眼安全方面较905nm更有优势,人眼可见光波长范围在380-780nm之间,1400nm以上的激光在到达人眼视网膜前就被眼球的透明部分吸收完,因此对人眼的伤害相对较小。也就意味着1550nm能够在更高光源功率下运行,从而实现更高的性能。且1550nm的光束发散角要小于905nm,发散角越小,光束照到远距离小物体时信息损失就越少,返回能量越大,探测效果更好。1550nm探测距离约250m,905nm约150-200m。对于相关应用者来说,做好平衡更关键。
*1550nm“容易被水吸收”,在雨天探测效果会大打折扣,尤其是成片的水帘或水滩;同时高功耗带来散热、耗电等困难也需一并考虑。
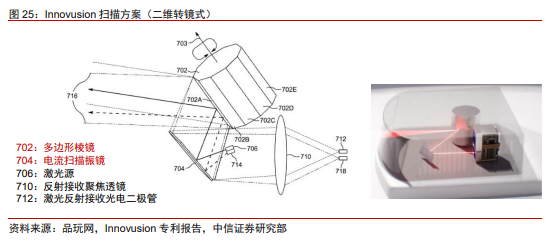
二维转镜:
二维转镜指有一纵一横两面扫瞄镜,横轴的多边形棱镜能够实现光源的水平扫描,而纵轴的扫描振镜则可以改变光源的垂直方向,通过两面镜子的旋转配合,二维转镜仅需一束光源就能够实现机械旋转式激光雷达若干个光源才能实现的扫描效果。
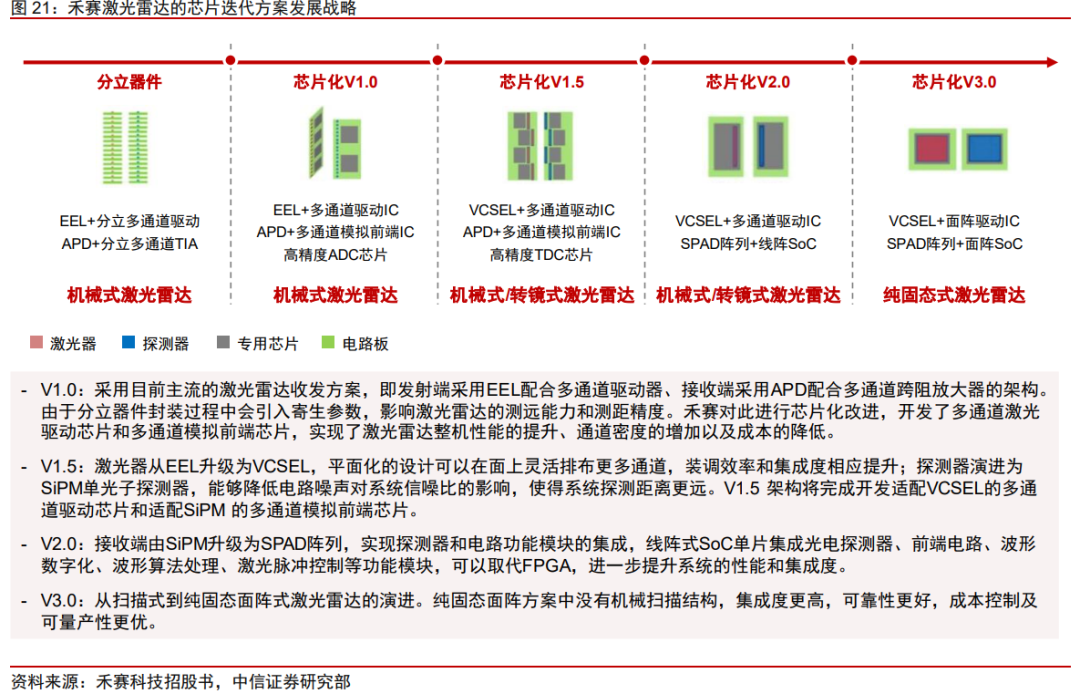
EEL:边发射激光器
VCSEL:垂直腔面发射激光器
激光发射器的选择主要取决于激光雷达的扫描方案和测距原理。VCSEL具有成本低、集成度高的优点。除激光雷达外,也可应用于DMS驾驶员监控摄像头。

PN结:
为解决VCSEL发光面积大、导致光源能量密度低,可实现的有效距离偏近,VCSEL厂商研发多结技术,即多个高掺杂隧道结(PN结),通过优化控制隧道结掺杂,可降低电流通过的电阻,从而减少电子发射光子所需的驱动电流,以实现更高的功率密度。量产产品的光功率密度约1200-1500W/mm²,对比EEL的光功率密度在万级别,二者差距甚大。但目前可靠性多结后变差、散热问题等尚未解决。

APD 雪崩光电二极管,SPAD单光子雪崩二极管,SiPM硅光电倍增管。SPAD是盖革模式(即偏置电压高于击穿电压)下的APD,具备单光子成像能力,而SiPM是硅基阵列模式的SPAD,由多个SPAD并联组成。
与APD相比,SPAD/SiPM的主要优势在于更强的增益效果和更高的灵敏度,但面临日光干扰的问题。
对比SPAD和SiPM,长距激光雷达目前多使用SiPM,Flash补盲激光雷达则以SPAD为主。

Deconvolution:
反卷积,反滤波,逆卷积,去卷积
定义:反卷积(deconvolution)是指通过 计算 输出和已知输入 ,求 未知输入的过程。
应用1:图像识别。应用2:可以从一组模糊的光切图像中提取出清晰的序列图像。如--AutoQuant三维反卷积软件。
corner case:
数据库中未被标注过的物体,如异形车、侧翻的大卡车、掀开后备箱的车等,纯视觉方案很难准确识别。
其他一些知识点
SWC: software component
SOC: system on chip
Arxml:实质是XML文件,一般通过autosar标准的XSD进行约束,arxml是一个通用的配置/数据库文件;ARXML可以包含service和signal的相关信息,以及E2E相关信息,若ARXML中定义了且完整体现了S2S转发关系信息,则也可以通过解析ARXML(替换转发关系表)的方式来实现S2S的测试。
XML文档是树状结构;
第1行:XML声明。必须放在第一行,第一列,声明语句之前,不能有任何的空格和注释。定义了XML版本和编码信息。其中,版本永远都是1.0;编码方式一般都使用UTF-8(该编码支持中文标签),编码信息不区分大小写。
第2行:根元素,XML有且仅有一个根元素。元素由开始标签、元素内容、结束标签组成,没有被其它元素包围的元素称为根元素;
第3行:注释的写法:,但不能嵌套使用。
第4行:” id=;book_1’”表示属性。属性必有值,值必须使用引号(单引号,双引号)。属性其实是描述标签一些额外的信息,一个标签可以有多个属性。可以将属性看为元素的另一种写法。
第5~7行:表示元素。
注意:XML中的标签区分大小写,对应的开始标签和结束标签必须大小写一致。
标签命名:普通字符有:字母,数字,-中横线,_下划线,.点号,数字不能作为首字母出现等。大段内容有许多特殊符号内容,使用转义,如下的例子:了看可是lj
XML中的标签是成对的,而且要正确嵌套:标签可以嵌套,但不可以交叉嵌套。
实际的项目当中,第4~8行这部分经常是重复的。
特殊符号使用符号实体:
单引号:用&apos表示
双引号:用"表示
空格:用 表示
&符号:用&表示
>符号:用>表示
<符号:用<表示
SOA:
Service-Oriented Architecture,面向服务的架构
S2S:
Services(基于以太网的服务)ToSignal(基于信号)
用于测试开发的输入文件应该包含三类信息:
1)S2S需求规范;
2)Service、Signal、E2E相关信息(ARXML中包含,或提供同样包含相关信息的其它类型的数据库文件)
3)S2S转发关系表
4)其他输入(可有,需求规范中设计的如SecOC等需求对应的输入物)
-基于AutoSar, S2S有两种部署方案,一个是在CP,一个在AP
CP:
1)可在信号和服务端分别配置相同或者不同的E2E配置
2)E2E不正确的不被转发
3)优点:信号路径很短
4)缺点:需要SomeIP协议栈
AP:
1)可在信号和服务端配置相同或不同的E2E配置
2) E2E不正确的在另一端反馈E2E错误
3)优点:有现成AutoSAR方案,无需SomeIP协议栈
4)缺点:信号路径过长,需用IPC缩短A核和M核通信路径
SOME/IP:
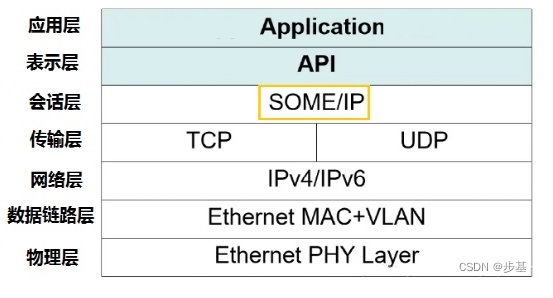
Scalable service-Oriented Middleware over IP,是目前汽车行业实现SOA架构最核心的通信协议。SOME/IP协议以服务为单位管理整车信息,服务可以包含各种可调用方法(Method)和事件通知组(EventGroup),通过Service Interface将信息进行传递共享,按需分配服务。
SOME/IP位于OSI七层模型的5-7层,需要运行TCP/IP协议栈之上,即所有的SOME/IP报文都是IP报文,都是TCP/UDP报文。
SOME/IP 主要可以提供以下功能:
① 数据序列化与反序列化(Serialization/Deserialization):服务通信数据与二进制数据流之间的双向转换;
② 可用服务发现(SD):管理服务状态,发现和提供服务,动态配置 SOME/IP 报文发送;
③ 服务发布与订阅(Publish/Subscribe):管理服务的发布与订阅关系;
④ 远程服务调用(RPC):实现控制器(Client)使用网络内其他控制器(Server)提供的服务。
关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智能汽车电子与软件最新资讯