
进程是指正在运行的程序,它拥有独立的内存空间和系统资源,不同进程之间的数据不共享。进程是资源分配的基本单位。
线程是进程内的执行单元,它与同一进程内的其他线程共享进程的内存空间和系统资源。线程是调度的基本单位。
在Linux中启动一个进程有多种方法:
#include
/**
* @brief 执行系统命令调用命令处理器来执行命令
*
* Detailed function description
*
* @param[in] command: 包含被请求变量名称的 C 字符串
*
* @return 如果发生错误,则返回值为 -1,否则返回命令的状态。
*/
int system(const char *command);
例子:通过system函数启动一个进程,列出当前目录下的文件及文件夹。
#include
#include
int main(void)
{
system("ls");
printf("ls end\n");
return 0;
}
#include
#include
/**
* @brief fork系统调用用于创建一个子进程
*
* Detailed function description
*
* @param[in]
*
* @return 如果发生错误,则返回值为 -1,否则返回命令的状态。
*/
pid_t fork(void);
例子:通过fork函数启动子进程
#include
#include
#include
#include
int main(void)
{
pid_t res = fork();
///< 子进程
if (res == 0)
{
printf("res = %d, I am child process. pid = %d\n", res, getpid());
exit(EXIT_SUCCESS); ///< 正常退出子进程
}
///< 父进程
else if (res > 0)
{
printf("res = %d, I am parent process. pid = %d\n", res, getpid());
int child_status = 0;
pid_t child_pid = wait(&child_status); ///< 父进程阻塞等待信号到来或子进程结束
printf("Child process(pid = %d) has been terminated, child_status = %d\n", child_pid, child_status);
}
///< 异常退出
else
{
printf("Fork failed.\n");
exit(EXIT_FAILURE);
}
return 0;
}
编译、运行:
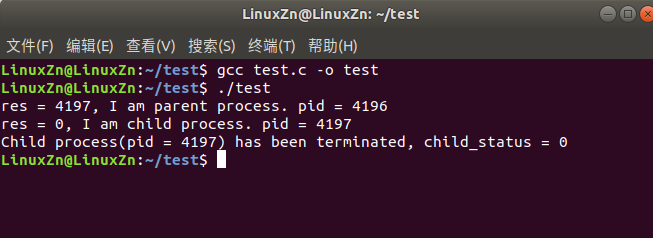
我们使用了fork()系统调用来创建一个新进程。如果fork()返回值为0,则说明当前进程是子进程;如果返回值大于0,则说明当前进程是父进程。在父进程中,我们使用wait()系统调用来等待子进程结束。当子进程结束后,父进程会继续执行。
#include
/**
* @brief 启动新进程,新进程会覆盖旧进程
*
* Detailed function description
*
* @param[in] path: 所执行文件的路径
* @param[in] file: 所执行文件的名称
* @param[in] arg: 传入的参数列表,以NULL作为结束
* @param[in] envp: 传入的环境变量
*
* @return 如果发生错误,则返回值为 -1,否则返回命令的状态。
*/
int execl(const char *path, const char *arg, ...);
int execlp(const char *file, const char *arg, ...);
int execle(const char *path, const char *arg, ..., char *const envp[]);
int execv(const char *path, char *const argv[]);
int execvp(const char *file, char *const argv[]);
int execve(const char *path, char *const argv[], char *const envp[]);
例子:通过execl()函数的参数列表调用了ls命令程序
#include
#include
int main(void)
{
execl("/bin/ls", "ls", "-la", NULL);
printf("ls end\n");
return 0;
}
execl()函数的参数列表调用了ls命令程序,与在终端上运行”ls -la”产生的结果是一样的。
在Linux中终止一个进程有多种方法:
进程间通信是指在不同进程之间传播或交换信息的一种机制。每个进程各自有不同的用户地址空间,任何一个进程的全局变量在另一个进程中都看不到,所以进程之间要交换数据必须通过内核,在内核中开辟一块缓冲区,进程A把数据从用户空间拷到内核缓冲区,进程B再从内核缓冲区把数据读走,内核提供的这种机制称为进程间通信。
进程间通信的目的:
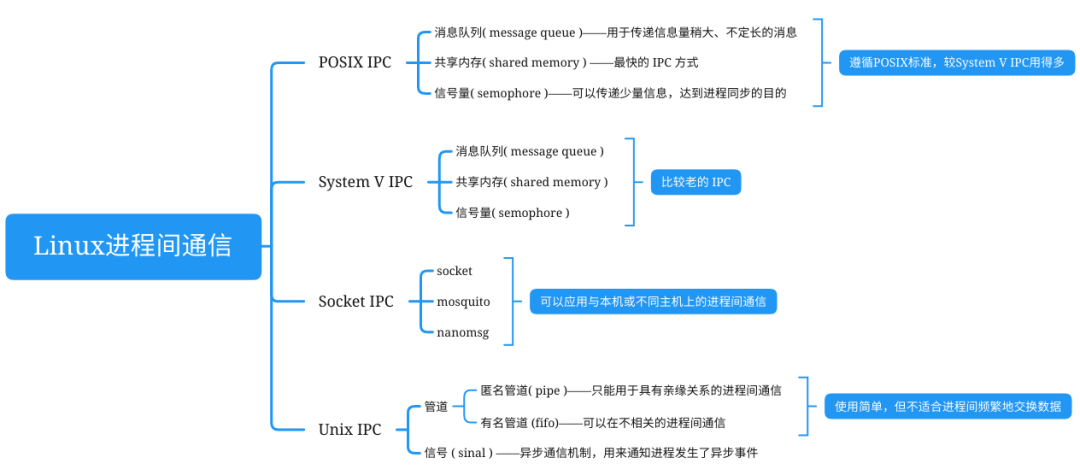
Linux IPC(Inter-process Comminication, 进程间通信)的方式:
内核中的一个优先级队列,多个进程通过访问同一个队列,进行添加结点或者获取结点实现通信。
POSIX消息队列头文件:
#include /* For O_* constants */
#include /* For mode constants */
#include
编译链接需要加上
-lrt链接。
消息队列API接口:
/**
* @brief 创建消息队列实例
*
* Detailed function description
*
* @param[in] name: 消息队列名称
* @param[in] oflag:根据传入标识来创建或者打开一个已创建的消息队列
- O_CREAT: 创建一个消息队列
- O_EXCL: 检查消息队列是否存在,一般与O_CREAT一起使用
- O_CREAT|O_EXCL: 消息队列不存在则创建,已存在返回NULL
- O_NONBLOCK: 非阻塞模式打开,消息队列不存在返回NULL
- O_RDONLY: 只读模式打开
- O_WRONLY: 只写模式打开
- O_RDWR: 读写模式打开
* @param[in] mode:访问权限
* @param[in] attr:消息队列属性地址
*
* @return 成功返回消息队列描述符,失败返回-1,错误码存于error中
*/
mqd_t mq_open(const char *name, int oflag, mode_t mode, struct mq_attr *attr);
/**
* @brief 无限阻塞方式接收消息
*
* Detailed function description
*
* @param[in] mqdes: 消息队列描述符
* @param[in] msg_ptr:消息体缓冲区地址
* @param[in] msg_len:消息体长度,长度必须大于等于消息属性设定的最大值
* @param[in] msg_prio:消息优先级
*
* @return 成功返回消息长度,失败返回-1,错误码存于error中
*/
mqd_t mq_receive(mqd_t mqdes, char *msg_ptr, size_t msg_len, unsigned *msg_prio);
/**
* @brief 指定超时时间阻塞方式接收消息
*
* Detailed function description
*
* @param[in] mqdes: 消息队列描述符
* @param[in] msg_ptr:消息体缓冲区地址
* @param[in] msg_len:消息体长度,长度必须大于等于消息属性设定的最大值
* @param[in] msg_prio:消息优先级
* @param[in] abs_timeout:超时时间
*
* @return 成功返回消息长度,失败返回-1,错误码存于error中
*/
mqd_t mq_timedreceive(mqd_t mqdes, char *msg_ptr, size_t msg_len, unsigned *msg_prio, const struct timespec *abs_timeout);
/**
* @brief 无限阻塞方式发送消息
*
* Detailed function description
*
* @param[in] mqdes: 消息队列描述符
* @param[in] msg_ptr:待发送消息体缓冲区地址
* @param[in] msg_len:消息体长度
* @param[in] msg_prio:消息优先级
*
* @return 成功返回0,失败返回-1
*/
mqd_t mq_send(mqd_t mqdes, const char *msg_ptr, size_t msg_len, unsigned msg_prio);
/**
* @brief 指定超时时间阻塞方式发送消息
*
* Detailed function description
*
* @param[in] mqdes: 消息队列描述符
* @param[in] msg_ptr:待发送消息体缓冲区地址
* @param[in] msg_len:消息体长度
* @param[in] msg_prio:消息优先级
* @param[in] abs_timeout:超时时间
*
* @return 成功返回0,失败返回-1
*/
mqd_t mq_timedsend(mqd_t mqdes, const char *msg_ptr, size_t msg_len, unsigned msg_prio, const struct timespec *abs_timeout);
/**
* @brief 关闭消息队列
*
* Detailed function description
*
* @param[in] mqdes: 消息队列描述符
*
* @return 成功返回0,失败返回-1
*/
mqd_t mq_close(mqd_t mqdes);
/**
* @brief 分离消息队列
*
* Detailed function description
*
* @param[in] name: 消息队列名称
*
* @return 成功返回0,失败返回-1
*/
mqd_t mq_unlink(const char *name);
消息队列基本API接口使用例子:发送进程给接收进程发送测试数据。
send.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#define MQ_MSG_MAX_SIZE 512 ///< 最大消息长度
#define MQ_MSG_MAX_ITEM 5 ///< 最大消息数目
static mqd_t s_mq;
typedef struct _msg_data
{
char buf[128];
int cnt;
}msg_data_t;
void send_data(void)
{
static int cnt = 0;
msg_data_t send_data = {0};
cnt++;
strcpy(send_data.buf, "hello");
send_data.cnt = cnt;
int ret = mq_send(s_mq, (char*)&send_data, sizeof(send_data), 0);
if (ret < 0)
{
perror("mq_send error");
return;
}
printf("send msg = %s, cnt = %d\n", send_data.buf, send_data.cnt);
}
int main(void)
{
int ret = 0;
struct mq_attr attr;
///< 创建消息队列
memset(&attr, 0, sizeof(attr));
attr.mq_maxmsg = MQ_MSG_MAX_ITEM;
attr.mq_msgsize = MQ_MSG_MAX_SIZE;
attr.mq_flags = 0;
s_mq = mq_open("/mq", O_CREAT|O_RDWR, 0777, &attr);
if(-1 == s_mq)
{
perror("mq_open error");
return -1;
}
for (size_t i = 0; i < 10; i++)
{
send_data();
sleep(1);
}
mq_close(s_mq);
return 0;
}
recv.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#define MQ_MSG_MAX_SIZE 512 ///< 最大消息长度
#define MQ_MSG_MAX_ITEM 5 ///< 最大消息数目
static mqd_t s_mq;
typedef struct _msg_data
{
char buf[128];
int cnt;
}msg_data_t;
int main(void)
{
int ret = 0;
struct mq_attr attr;
char recv_msg[MQ_MSG_MAX_SIZE] = {0};
msg_data_t recv_data = {0};
int prio = 0;
ssize_t len = 0;
s_mq = mq_open("/mq", O_RDONLY);
if(-1 == s_mq)
{
perror("mq_open error");
return -1;
}
while (1)
{
if((len = mq_receive(s_mq, (char*)&recv_data, MQ_MSG_MAX_SIZE, &prio)) == -1)
{
perror("mq_receive error");
return -1;
}
printf("recv_msg = %s, cnt = %d\n", recv_data.buf, recv_data.cnt);
sleep(1);
}
mq_close(s_mq);
mq_unlink("/mq");
return 0;
}
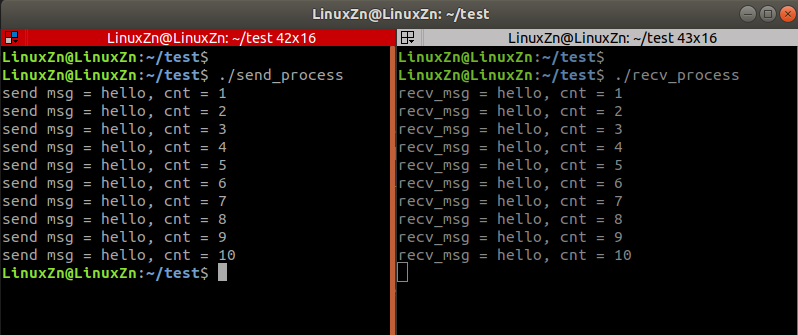
编译、运行:
gcc send.c -o send_process -lrt
gcc recv.c -o recv_process -lrt
消息队列的读取和写入的过程,会有发生用户态与内核态之间的消息拷贝过程。而共享内存的方式则没有这个拷贝过程,进程间通信速度较快。
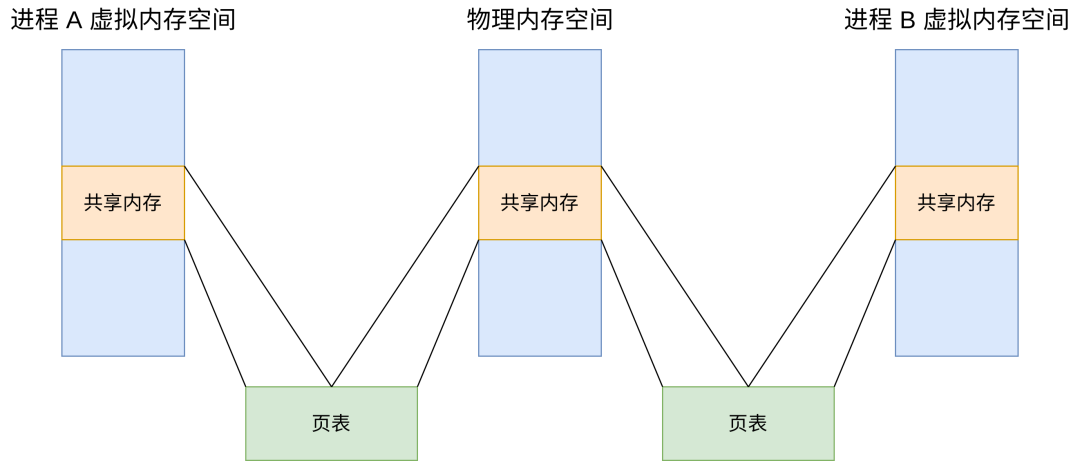
在物理内存上开辟一块内存空间,多个进程可以将同一块物理内存空间映射到自己的虚拟地址空间,通过自己的虚拟地址直接访问这块空间,通过这种方式实现数据共享。
POSIX共享内存头文件:
#include
#include
#include
共享内存API接口:
/**
* @brief 创建共享内存实例
*
* Detailed function description
*
* @param[in] name: 要打开或创建的共享内存文件名
* @param[in] oflag:打开的文件操作属性
- O_CREAT: 创建一个共享内存文件
- O_EXCL: 检查共享内存是否存在,一般与O_CREAT一起使用
- O_CREAT|O_EXCL: 共享内存不存在则创建,已存在返回NULL
- O_NONBLOCK: 非阻塞模式打开,共享内存不存在返回NULL
- O_RDONLY: 只读模式打开
- O_WRONLY: 只写模式打开
- O_RDWR: 读写模式打开
* @param[in] mode:文件共享模式,例如 0777
*
* @return 成功返回共享内存描述符,失败返回-1,错误码存于error中
*/
int shm_open(const char *name, int oflag, mode_t mode);
/**
* @brief 删除共享内存
*
* Detailed function description
*
* @param[in] name: 创建的共享内存文件名
*
* @return 成功返回0,失败返回-1
*/
int shm_unlink(const char *name);
/**
* @brief 将打开的文件映射到内存
*
* Detailed function description
*
* @param[in] addr: 要将文件映射到的内存地址,一般应该传递NULL来由Linux内核指定
* @param[in] length: 要映射的文件数据长度
* @param[in] prot: 映射的内存区域的操作权限(保护属性),包括PROT_READ、PROT_WRITE、PROT_READ|PROT_WRITE
* @param[in] flags: 标志位参数,包括:MAP_SHARED、MAP_PRIVATE与MAP_ANONYMOUS。
* @param[in] fd: 用来建立映射区的文件描述符,用 shm_open打开或者open打开的文件
* @param[in] offset: 映射文件相对于文件头的偏移位置,应该按4096字节对齐
*
* @return 成功返回0,失败返回-1
*/
void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset);
/**
* @brief 取消内存映射
*
* Detailed function description
*
* @param[in] addr: 由mmap成功返回的地址
* @param[in] length: 要取消的内存长度
*
* @return 成功返回0,失败返回-1
*/
int munmap(void *addr, size_t length);
/**
* @brief 将参数fd指定的文件大小改为参数length指定的大小
*
* Detailed function description
*
* @param[in] fd: 已打开的文件描述符,以写入模式打开的文件
* @param[in] length: 要设置的长度
*
* @return 成功返回0,失败返回-1
*/
int ftruncate(int fd,off_t length);
/**
* @brief 获取文件相关的信息,将获取到的信息放入到statbuf结构体中
*
* Detailed function description
*
* @param[in] fd: 已打开的文件描述符
* @param[out] statbuf: 文件的信息
*
* @return 成功返回0,失败返回-1
*/
int fstat(int fd, struct stat *statbuf);
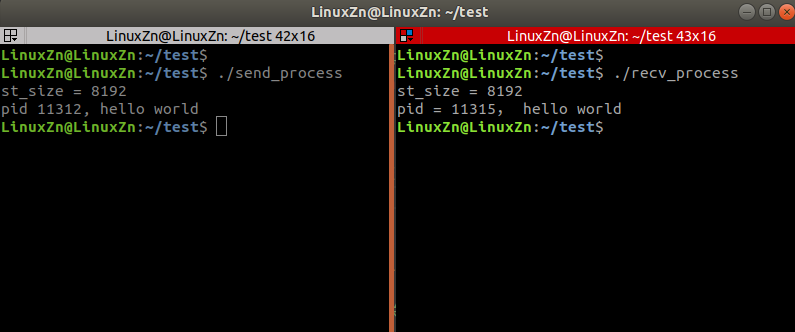
共享内存基本API接口使用例子:发送进程给接收进程发送测试数据。
send.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#define SHM_NAME "/shm"
int main(void)
{
int ret = 0;
///< 创建和读端相同的文件标识
int shm_fd = shm_open(SHM_NAME, O_RDWR | O_CREAT, 0666);
if (shm_fd == -1)
{
printf("shm_open error\n");
}
///< 设置共享内存文件为8KB
ftruncate(shm_fd , 8 * 1024);
///< 获取共享内存文件相关属性信息
struct stat filestat = {0};
fstat(shm_fd, &filestat);
printf("st_size = %ld\n",filestat.st_size);
///< 内存映射
char *shm_ptr = (char*)mmap(NULL, filestat.st_size, PROT_READ|PROT_WRITE, MAP_SHARED, shm_fd, 0);
close(shm_fd);
///< 向共享内存中写入数据
char buf[] = "hello world";
memmove(shm_ptr,buf, sizeof(buf));
printf("pid %d, %s\n",getpid(), shm_ptr);
///< 写入完成后解除映射
munmap(shm_ptr, filestat.st_size);
return 0;
}
recv.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#define SHM_NAME "/shm"
int main(void)
{
///< 创建共享内存文件标识符
int shm_fd = shm_open(SHM_NAME, O_RDWR | O_CREAT, 0666);
if (shm_fd == -1)
{
printf("shm_open failed\n");
exit(EXIT_FAILURE);
}
///< 设置共享内存文件为8KB
ftruncate(shm_fd , 8192);
///< 获取共享内存文件相关属性信息
struct stat filestat;
fstat(shm_fd, &filestat);
printf("st_size = %ld\n",filestat.st_size);
///< 映射共享内存,并获取共享内存的地址
char *shm_ptr = (char*)mmap(NULL, filestat.st_size, PROT_READ|PROT_WRITE, MAP_SHARED, shm_fd, 0);
close(shm_fd);
///< 获取共享内存地址中的内容并打印,最后再解除映射,删除共享内存
printf("pid = %d, %s\n", getpid(), shm_ptr);
munmap(shm_ptr, filestat.st_size);
shm_unlink(SHM_NAME);
return 0;
}
编译、运行:
gcc send.c -o send_process -lrt
gcc recv.c -o recv_process -lrt
对具有多个处理核系统消息传递的性能要优于共享内存。共享内存会有高速缓存一致性问题,这是由共享数据在多个高速缓存之间迁移而引起的。随着系统的处理核的数量的日益增加,可能导致消息传递作为 IPC 的首选机制。
UNIX域套接字与传统基于TCP/IP协议栈的socket不同,unix domain socket以文件系统作为地址空间,不需经过TCP/IP的头部封装、报文ack确认、路由选择、数据校验与重传过程,因此传输速率上也不会受网卡带宽的限制。
unix domain socket在进程间通信同样是基于“客户端—服务器”(C-S)模式。
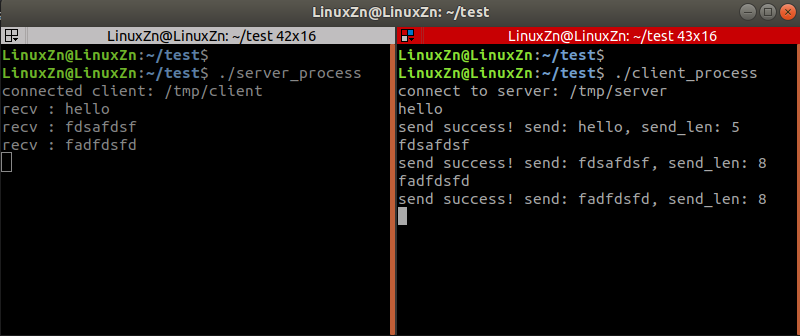
UNIX域套接字基本API接口使用例子:基于UNIX域套接字客户端进程向服务端进程发送测试数据。
server.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#include
#include
#include
#define SERVER_PATH "/tmp/server"
int main(void)
{
///< 创建UNIX域字节流套接字
int server_fd = socket(AF_LOCAL, SOCK_STREAM, 0);
if(server_fd < 0)
{
printf("socket error\n");
exit(EXIT_FAILURE);
}
///< 绑定服务端地址
unlink(SERVER_PATH);
struct sockaddr_un server_addr;
memset((char*)&server_addr, 0, sizeof(server_addr));
server_addr.sun_family = AF_LOCAL;
strncpy(server_addr.sun_path, SERVER_PATH, sizeof(server_addr.sun_path)-1);
if(bind(server_fd, (struct sockaddr*)&server_addr, sizeof(server_addr)) < 0)
{
printf("bind error\n");
close(server_fd);
exit(EXIT_FAILURE);
}
///< 监听
if(listen(server_fd, 10) < 0)
{
printf("listen error\n");
close(server_fd);
exit(EXIT_FAILURE);
}
///< 等待客户端连接
int addr_len = sizeof(struct sockaddr);
struct sockaddr_un client_addr;
int client_fd = accept(server_fd, (struct sockaddr*)&client_addr, (socklen_t *)&addr_len);
if(client_fd < 0)
{
printf("accept error\n");
close(server_fd);
unlink(SERVER_PATH);
exit(1);
}
else
{
printf("connected client: %s\n", client_addr.sun_path);
}
while(1)
{
char buf[128] = {0};
int recv_len = read(client_fd, buf, sizeof(buf));
if(recv_len <= 0)
{
printf("recv error!\n");
close(client_fd);
exit(EXIT_FAILURE);
}
printf("recv : %s\n", buf);
}
unlink(SERVER_PATH);
close(server_fd);
close(client_fd);
return 0;
}
client.c:
#include
#include
#include
#include
#include /* For O_* constants */
#include /* For mode constants */
#include
#include
#include
#include
#define SERVER_PATH "/tmp/server"
#define CLIENT_PATH "/tmp/client"
int main(void)
{
///< 创建UNIX域字节流套接字
int client_fd = socket(AF_UNIX, SOCK_STREAM, 0);
if(client_fd < 0)
{
printf("socket error\n");
exit(EXIT_FAILURE);
}
///< 显式绑定客户端地址
struct sockaddr_un client_addr;
memset((char*)&client_addr, 0, sizeof(client_addr));
client_addr.sun_family = AF_UNIX;
strncpy(client_addr.sun_path, CLIENT_PATH, sizeof(client_addr.sun_path)-1);
unlink(CLIENT_PATH);
if(bind(client_fd, (struct sockaddr*)&client_addr, sizeof(client_addr)) < 0)
{
printf("bind error\n");
close(client_fd);
exit(1);
}
///< 连接服务端
struct sockaddr_un server_addr;
server_addr.sun_family = AF_UNIX;
strncpy(server_addr.sun_path, SERVER_PATH, sizeof(server_addr.sun_path)-1);
int ret = connect(client_fd, (struct sockaddr*)&server_addr, sizeof(server_addr));
if(ret < 0)
{
printf("connect error\n");
close(client_fd);
unlink(CLIENT_PATH);
exit(1);
}
printf("connect to server: %s\n", server_addr.sun_path);
while(1)
{
char buf[128] = {0};
if (scanf("%s", buf))
{
int send_len = write(client_fd, buf, strlen(buf));
if (send_len <= 0)
{
printf("write error!\n");
close(client_fd);
exit(EXIT_FAILURE);
}
else
{
printf("send success! send: %s, send_len: %d\n", buf, send_len);
}
}
}
unlink(SERVER_PATH);
close(client_fd);
return 0;
}
编译、运行:
gcc server.c -o server_process
gcc client.c -o client_process
类socket的其它进程间通信方式:
mqtt应用于进程间通信
在内核中开辟一块缓冲区;若多个进程拿到同一个管道(缓冲区)的操作句柄,就可以访问同一个缓冲区,就可以进行通信。涉及到两次用户态与内核态之间的数据拷贝。
内核中的缓冲区是没有具体的标识符的,匿名管道只能用于具有亲缘关系的进程间通信。
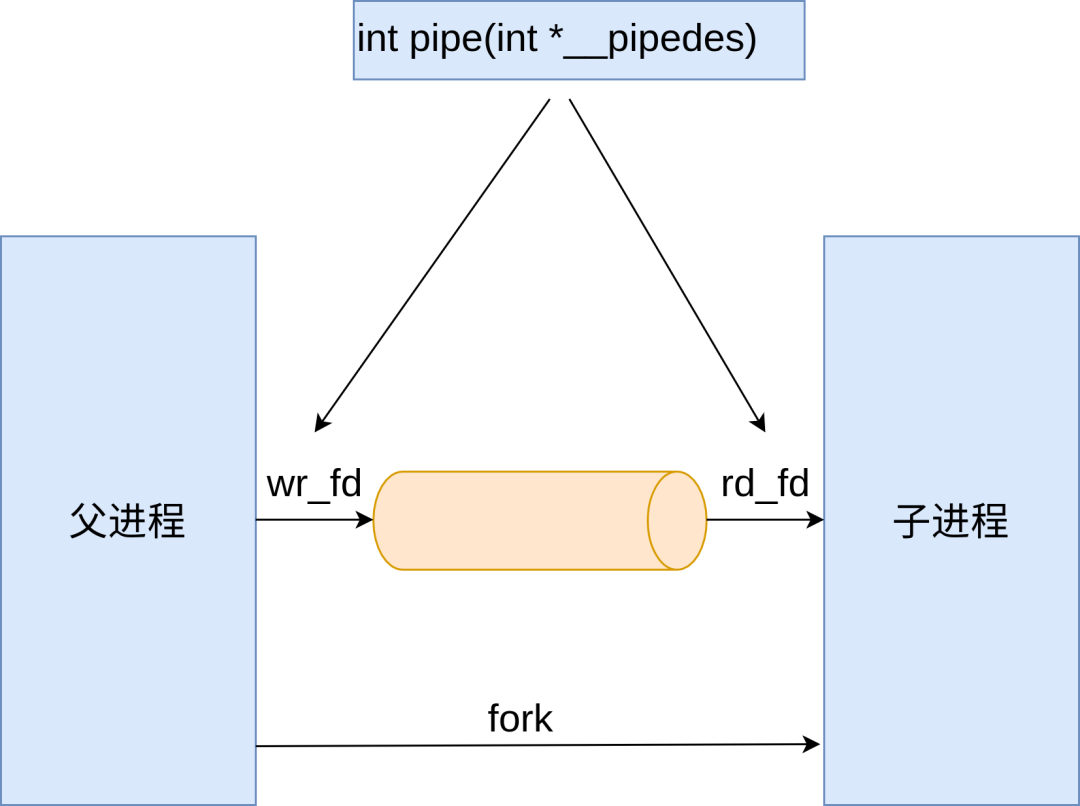
调用pipe接口可以创建一个匿名管道,并返回了两个描述符,一个是管道的读取端描述符 fd[0],另一个是管道的写入端描述符 fd[1]。
管道是一个半双工通信(可以选择方向的单向传输)
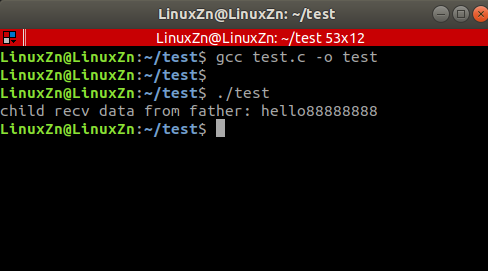
匿名管道基本API接口使用例子:父进程通过管道发送测试数据给子进程。
#include
#include
#include
#include
int main()
{
///< 创建管道
int pipefd[2] = {-1};
int ret = pipe(pipefd);
if (ret < 0)
{
printf("pipe error\n");
exit(EXIT_FAILURE);
}
int read_fd = pipefd[0]; ///< pipefd[0] 用于从管道中读取数据
int write_fd = pipefd[1]; ///< pipefd[1] 用于向管道中写入数据
///< 创建子进程
pid_t pid = fork();
if (pid == 0)
{
///< 子进程从管道读取数据
char buf[128] = {0};
read(read_fd, buf, sizeof(buf));
printf("child recv data from father: %s", buf);
}
else if (pid > 0)
{
///< 父进程向管道写入数据
char *ptr = "hello88888888\n";
write(write_fd, ptr, strlen(ptr));
}
return 0;
}
编译、运行:
如果需要双向通信,则应该创建两个管道。
命名管道也是内核中的一块缓冲区,并且这个缓冲区具有标识符;这个标识符是一个可见于文件系统的管道文件,能够被其他进程找到并打开管道文件,则可以获取管道的操作句柄,所以该命名管道可用于同一主机上的任意进程间通信。
创建命名管道的接口:
int mkfifo(const char *pathname, mode_t mode);
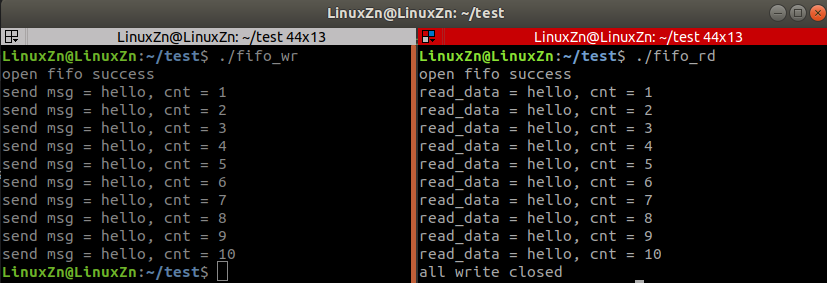
命名管道基本API接口使用例子:一个进程往管道中写入测试数据,另一个进程从管道中读取数据。
fifo_wr.c:
#include
#include
#include
#include
#include
#include
#include
#define FIFO_PATH "./fifo_file"
typedef struct _msg_data
{
char buf[128];
int cnt;
}msg_data_t;
void send_data(int fd)
{
static int cnt = 0;
msg_data_t send_data = {0};
cnt++;
strcpy(send_data.buf, "hello");
send_data.cnt = cnt;
write(fd, &send_data, sizeof(send_data));
printf("send msg = %s, cnt = %d\n", send_data.buf, send_data.cnt);
}
int main(void)
{
///< 创建管道文件
int ret = mkfifo(FIFO_PATH, 0664);
if (ret < 0 && errno != EEXIST)
{
printf("mkfifo error\n");
exit(EXIT_FAILURE);
}
///< 以只写的方式打开管道文件
int fd = open(FIFO_PATH, O_WRONLY);
if (fd < 0)
{
printf("open fifo error\n");
exit(EXIT_FAILURE);
}
printf("open fifo success\n");
///< 写10次
for (size_t i = 0; i < 10; i++)
{
send_data(fd);
sleep(1);
}
close(fd);
return 0;
}
fifo_rd.c:
#include
#include
#include
#include
#include
#include
#include
#define FIFO_PATH "./fifo_file"
typedef struct _msg_data
{
char buf[128];
int cnt;
}msg_data_t;
int main(void)
{
umask(0);
///< 创建管道文件
int ret = mkfifo(FIFO_PATH,0664 );
if (ret < 0 && errno != EEXIST)
{
printf("mkfifo error\n");
exit(EXIT_FAILURE);
}
///< 以只读方式获取管道文件的操作句柄
int fd = open(FIFO_PATH, O_RDONLY);
if (fd < 0)
{
printf("open error\n");
exit(EXIT_FAILURE);
}
printf("open fifo success\n");
while(1)
{
msg_data_t read_data = {0};
///< 将从管道读取的文件写到buf中
int ret = read(fd, &read_data, sizeof(read_data));
if (ret < 0)
{
printf("read error\n");
exit(EXIT_FAILURE);
}
else if (ret == 0)
{
printf("all write closed\nd");
exit(EXIT_FAILURE);
}
printf("read_data = %s, cnt = %d\n", read_data.buf, read_data.cnt);
sleep(1);
}
close(fd);
return 0;
}
编译、运行:
gcc fifo_wr.c -o fifo_wr
gcc fifo_rd.c -o fifo_rd
信号量(Seamphore)是进程和线程间同步的一种机制。
信号量本质是一个非负的整型变量。增加一个可用资源执行加一,也称为V操作;获取一个资源资源后执行减一,也称为P操作。
信号量根据信号值不同可分为两类:
信号量根据作用对象不同可分为两类:
POSIX信号量头文件:
#include
编译链接需要加-lpthread参数。
信号量API接口:
/**
* @brief 创建信号量
*
* Detailed function description
*
* @param[in] name: 信号量名称
* @param[in] mode: 访问权限
* @param[in] value: 信号量初始值
*
* @return 成功时返回指向信号量的指针,出错时为SEM_FAILED
*/
sem_t *sem_open(const char *name,int oflag, mode_t mode, unsigned int value);
/**
* @brief 初始化信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
* @param[in] pshared: 信号量作用域,分为进程内作用域PTHREAD_PROCESS_PRIVATE和跨进程作用域PTHREAD_PROCESS_SHARED
* @param[in] value: 信号量初始值
*
* @return 成功返回0,失败返回-1
*/
int sem_init(sem_t *sem, int pshared, unsigned int value);
/**
* @brief 获取信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
* @param[out] sval: 保存返回信号值地址
*
* @return 成功返回0,失败返回-1
*/
int sem_getvalue(sem_t *sem, int *sval);
/**
* @brief 阻塞方式等待信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
*
* @return 成功返回0,失败返回-1
*/
int sem_wait(sem_t *sem);
/**
* @brief 指定超时时间阻塞方式等待信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
* @param[in] sem: 超时时间,单位为时钟节拍
*
* @return 成功返回0,失败返回-1
*/
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
/**
* @brief 非阻塞方式等待信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
*
* @return 成功返回0,失败返回-1
*/
int sem_trywait(sem_t *sem);
/**
* @brief 产生信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
*
* @return 成功返回0,失败返回-1
*/
int sem_post(sem_t *sem);
/**
* @brief 销毁信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
*
* @return 成功返回0,失败返回-1
*/
int sem_destroy(sem_t *sem);
/**
* @brief 关闭信号量
*
* Detailed function description
*
* @param[in] sem: 信号量实例地址
*
* @return 成功返回0,失败返回-1
*/
int sem_close(sem_t *sem);
/**
* @brief 分离信号量
*
* Detailed function description
*
* @param[in] name: 信号量名称
*
* @return 成功返回0,失败返回-1
*/
int sem_unlink(const char *name);
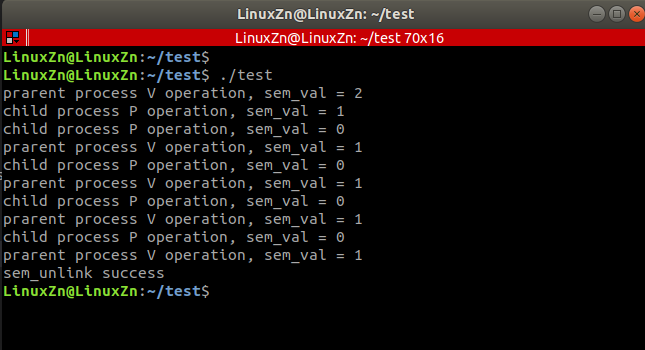
信号量基本API接口使用例子:父子进程间通信
#include
#include
#include
#include
#include
#define SEM_NAME "sem"
int main (void)
{
int sem_val = 0;
///< 创建信号量
sem_t *sem = sem_open(SEM_NAME, O_CREAT, 0666, 1);
if (NULL == sem)
{
printf("sem_open error\n");
exit(EXIT_FAILURE);
}
///< 创建子进程
pid_t pid = fork();
if (pid == -1)
{
printf("fork error\n");
sem_close(sem);
sem_unlink(SEM_NAME);
exit(EXIT_FAILURE);
}
else if(pid == 0)
{
///< 子进程进行5次P操作
for (size_t i = 0; i < 5; i++)
{
sem_wait(sem);
if (sem_getvalue(sem, &sem_val) != -1)
{
printf("child process P operation, sem_val = %d\n", sem_val);
sleep(1);
}
}
_exit(1);
}
else if (pid > 0)
{
///< 父进程执行5次V操作
for (size_t i = 0; i < 5; i++)
{
sem_post(sem);
if (sem_getvalue(sem, &sem_val) != -1)
{
printf("prarent process V operation, sem_val = %d\n", sem_val);
sleep(2);
}
}
}
///< 删除sem信号量
sem_close(sem);
if (sem_unlink(SEM_NAME) != -1)
{
printf("sem_unlink success\n");
}
return 0;
}
编译、运行:
操作系统根据不同的场景提供了不同的方式,消息队列、共享内存、UNIX域套接字、管道、信号量。
消息队列: 内核中的一个优先级队列,多个进程通过访问同一个队列,在队列当中添加或者获取节点来实现进程间通信。
共享内存: 本质是一块物理内存,多个进程将同一块物理内存映射到自己的虚拟地址空间中,再通过页表映射到物理地址达到进程间通信,它是最快的进程间通信方式,相较其他通信方式少了两步数据拷贝操作。
UNIX域套接字: 与TCP/IP套接字使用方式相同,但UNIX域套接字以文件系统作为地址空间,不需经过TCP/IP的头部封装、报文ack确认、路由选择、数据校验与重传过程,因此传输速率上也不会受网卡带宽的限制。
管道: 内核中的一块缓冲区,分为匿名管道和命名管道。匿名管道只能用于具有亲缘关系的进程间;而命名管道可用于同一主机上任意进程间通信。
信号量: 本质是内核中的一个计数器,主要实现进程间的同步与互斥,对资源进行计数,有两种操作,分别是在访问资源之前进行的p操作,还有产生资源之后的v操作。
相关资料:
由于微信公众号近期改变了推送规则,为了防止找不到,可以星标置顶,这样每次推送的文章才会出现在您的订阅列表里。
猜你喜欢:
实用 | 分享几个非常实用的开源项目
柔性数组在实际项目中的应用?
干货 | protobuf-c之嵌入式平台使用
C语言、嵌入式重点知识:回调函数
实用 | 10分钟教你搭建一个嵌入式web服务器
