社区首页
博客
论坛
下载
文库
评测
芯语
研讨会
商城
EE直播间
芯视频
E聘
更多
社区
论坛
博客
下载
评测中心
面包芯语
问答
E币商城
社区活动
ASPENCORE学院
资讯
电子工程专辑
国际电子商情
电子技术设计
CEO专栏
eeTV
EE|Times全球联播
资源
EE直播间
在线研讨会
视频
白皮书
小测验
供应商资源
ASPENCORE Studio
活动
2021中国IC领袖峰会暨IC成就奖
工业4.0技术及应用峰会
第22届电源管理论坛
国际AIoT生态发展大会
更多活动预告
杂志与服务
免费订阅杂志
电子工程专辑电子杂志
电子技术设计电子杂志
国际电子商情电子杂志
登录|注册
帖子
博文
电子工程专辑
电子技术设计
国际电子商情
资料
白皮书
研讨会
芯语
文库
首页
热门
专栏作家
电子产业热词
CEO专栏
技术文库
科技头条
专栏入驻
登录
首页
专栏作家
CEO专栏
论坛
博客
E币商城
资讯
电子工程专辑
国际电子商情
电子技术设计
从手写代码到AUTOSAR工具链-工程创建与模块集成
汽车电子与软件
2023-06-05 19:29
2005浏览
0评论
0点赞
汽车照明系统的“智慧大脑”,竟然是它?》
汽车智能照明背后的“黑科技”传感器,你知道吗?
接前面三篇:
1、从手写代码到AUTOSAR工具链 - RTE入门篇
2、从手写代码到AUTOSAR工具链_EcuM应用篇
3、从手写代码到AUTOSAR工具链-BswM应用篇
1
引言
在
AUTOSAR
方式设计车载
ECU
软件的初期,很多项目团队都采用“基础软件外协开发”的模式。即委托第三方软件公司搭建一个
AUTOSAR
工程并给出各主要模块的设计示例,再在此基础上去做自己的项目。这样的开发模式有助于快速适应全新的设计方法,缩短项目周期,但也会带来“过于依赖项目组外部资源,一旦出现错误难于解决”等问题。
本文针对上述痛点,讲述了在
ETAS
工具链环境下进行工程创建和常用模块集成的全过程,目的是让读者对
AUTOSAR
工程的产生过程有一个大致的了解,从整体上理清
AUTOSAR
方式设计车载嵌入式软件的思路。
由于要“从无到有”地创建一个实用的
AUTOSAR
工程,该系列之前编写的三篇文章将作为参考文献在文中引用,感兴趣的读者可在“你好旧时光追忆”公众号中查找阅读。
(
1
)《从手写代码到
AUTOSAR
工具链
- RTE
入门篇》,以下简称《
RTE
入门篇》。
(
2
)《从手写代码到
AUTOSAR
工具链
- EcuM
应用篇》,以下简称《
EcuM
应用篇》。
(
3
)《从手写代码到
AUTOSAR
工具链
- BswM
应用篇》,以下简称《
BswM
应用篇》。
2
工具链
本文所述设计集成过程除
MCAL
部分采用
Infineon
和
EB
联合开发的“
EB Tresos
”工具外,其余模块均采用
ETAS
工具链开发,如表
2-1
所列。
表
2-1: AUTOSAR
工具链汇总
序号
集成开发环境
子工具
功用
1
EB Tresos
EB Tresos
MCAL
模块设计
2
ISOLAR-AB
ISOLAR-A
系统级架构设计
RTA-RTE
接口设计
RTA-BSW
BSW
模块设计
3
RTA-OS
RTA-OS
操作系统设计
3
工程创建和模块集成
对于
ETAS
工具链使用者而言,
AUTOSAR
工程主要是在
ISOLAR-AB
中创建、设计和集成的。
下面以
VCU
项目为例讲解
AUTOSAR
工程创建过程,其它车载
ECU
软件可在此基础上做相应改动。
3.1
工程创建
AUTOSAR
工程创建在
ISOLAR-A
中进行。
3
.1
.1
文件
夹
创建
按照表
3-1
创建工程文件夹。
表
3-1:
工程文件夹创建
序号
一级文件夹
二级文件夹
三级文件夹
1
hightec_vcu
-
-
2
isolar_ab_vcu
-
-
3
mcal_vcu
-
-
4
vcu
src
ASW
、
BSW
、
CDD
、
INFRA
、
IOHWAB
、
RTE
、
Target
3.1.2
AUTOSAR
工程创建
双击“
ISOLAR-AB V 4.0
”图标,弹出图
3-1
所示的界面,按照图示步骤操作进入
ISOLAR-AB
工具的主界面。
图
3-1: ISOLAR-AB
工作空间选择
在主界面中点击“
File->New->AUTOSAR Project
”新建工程,弹出图
3-2
所示的界面,按照图中步骤完成工程创建。
图
3-2: AUTOSAR
工程创建界面
3.2
架构设计
AUTOSAR
开发方式中的架构设计即软件组件(
SWC
)的设计,包括创建软件组件、端口接口设计、内部行为设计等步骤,还需将
SWC
分别加入部件和
ECU
。具体操作方法详见《
RTE
入门篇》。
3.3
配置系统
系统创建和配置按照下列步骤进行。
3.3.1
部件创建
按照图
3-3
和图
3-4
所示创建部件。
图
3-3:
部件创建启动
图
3-4:
部件创建配置
3.3.2
系统创建
按照图
3-5
和图
3-6
所示创建系统。
图
3-5:
系统创建启动
图
3-6:
系统创建配置
3.3.3
系统配置
系统配置包括建立对部件的引用、抽取配置和映射创建
3
部分。
(
1
)建立系统对部件的引用
为上节创建的“
System
”生成
1
个子项“
Root Software Compositions | Root Sw Composition Prototype
”,并将其“
SoftwareComposition
”的引用配置为“
TopLevelComposition
”。
(
2
)系统抽取配置
配置上节创建“
System
”的类别。
(
3
)映射创建
为上节创建的“
System
”生成
1
个子项“
Mappings | Mapping
”,命名为“
SwcToEcuMapping
”,并配置“
Ecu
实例”。
3.4
通信配置
通信配置主要包括
DBC
导入、报文发送周期配置、抽取和生成
RTA-BSW
等操作,完成这些步骤后,与
CAN
通信有关的
BSW
模块将自动生成。
图
3-7:
生成
RTA-BSW
表
3-2: RTA-BSW
后自动生成的
BSW
模块
序号
一级文件夹
二级文件夹
BSW
模块
1
Com Stack
Can Modules
Can
2
CanIf
3
CanSM
4
-
Com
5
-
PduR
6
Mode Mgm
-
ComM
7
Other Modules
-
ComStack
8
-
Ecuc
9
-
rba_ArxmlGen
3.5
模式管理配置
依次进行
EcuM
和
BswM
模块的配置,具体参见《
EcuM
应用篇》和《
BswM
应用篇》。
3.6
操作系统配置
操作系统配置分为
2
部分,
ISOLAR-AB
中的
OS
模块配置和
RTA-OS
中的配置。
3.6.1 OS
模块配置
创建
Os
模块并完成基础配置。
(
1
)
Os
创建
创建
Os
模块,再依图
3-8
删除多余项。
图
3-8: Os
多余项删除
(
2
)应用模式配置
按照图
3-9
的步骤进行。
图
3-9: Os
应用模式配置
(
3
)计数器配置
为
Os
应用配置计数器信息,图
3-10
为其配置方法。
图
3-10: Os
计数器配置
(
4
)任务配置
根据项目需要配置
OS
任务,图
3-11
为配置方法,表
3-3
为任务配置示例。
图
3-11: Os
任务配置
表
3-3: Os
任务参数配置示例
序号
配置项
配置值
说明
1
ShortName
XXX
任务名
2
OsTaskActivation
1
定义该任务最大数量的队列激活请求,
1
表示在任何时刻任务仅允许单次激活
3
OsTaskPriority
39
任务优先级,数值越大优先级越高(对于
TC275
单片机)
4
OsTaskSchedule
FULL
定义任务的优先处理性
5
OsTaskStackAllocation
-
任务手动堆栈分配,以字节为单位
6
OsTaskWaitStack
-
激活等待事件时的任务堆栈使用
7
OsTaskBudget
-
执行预算,以“浮点数
+
时基名
+
单位”表达
8
OsTaskCanCallSchedule
-
任务调用或可能调用“
Schedule()
”时配置为
TRUE
9
OsTraceFilter
-
描述任务是否被
RTA-TRACE
跟踪
10
OsTaskAccessingApplication
-
访问该对象的应用的引用
11
OsTaskEventRef
-
此引用定义了扩展任务可能会响应的事件列表
12
OsTaskResourceRef
-
此引用定义了该任务访问的资源列表
13
OsRegSetRef
-
该任务用到的寄存器集的引用
3.6.2 RTA-OS
配置
在生成
RTE
成功后进行。
(
1
)工程创建
点击“
File->New Project
”新建工程,按照图
3-12
所示配置工程属性。
图
3-12: OS
工程属性配置
(
2
)文件加载
按照图
3-13
所示将“
...\src\RTE\gen
”路径下的
osNeeds.arxml
文件加载进来。
图
3-13: OS
工程文件加载
(
3
)工程保存
将工程创建时自动生成的
ARXML
文件命名为“
RTAOS.arxml
”,并将其保存至“
...\src\Target\TC275\RTAOS\config
”路径下。
(
4
)通用参数配置
OS
通用参数配置按照图
3-14
进行。
图
3-14: OS
通用配置
(
5
)应用模式配置
按照图
3-15
将
OS
应用模式配置为
OSDEFAULTAPPMODE
。
图
3-15: OS
应用模式配置
(
6
)中断配置
按照图
3-16
配置项目中需要的二类中断。
图
3-16: OS
中断配置
3.6.3 RTA-OS
生成
按照下列步骤生成
OS
代码。
(
1
)文件夹创建
在“
...\src\Target\TC275
”路径下创建表
3-4
所示的文件夹。
表
3-4: RTAOS
文件夹创建
序号
一级文件夹
二级文件夹
三级文件夹
四级文件夹
五级文件夹
1
RTAOS
config
2
generated
inc
3
lib
4
report
5
integration
inc
6
src
7
MCAL
modules
general
inc
8
tricore
compiler
9
inc
(
2
)生成配置
按照图
3-17
、图
3-18
和图
3-19
的方法依次进行
RTA-OS
生成配置。
图
3-17: RTA-OS
生成选项配置
图
3-18: RTA-OS
生成输出位置配置
图
3-19: RTA-OS
生成包含路径配置
(
3
)生成操作
按照图
3-20
所示生成
OS
的代码。
图
3-20: OS
代码生成
3.7 RTE
配置
创建
Rte
模块并完成基础配置。
3.7.1 Rte
创建
创建
Rte
模块,再依图
3-21
删除多余项。
图
3-21: Rte
多余项删除
3.7.2 Rte
配置
依次进行
Rte
模块的配置。
(
1
)
Rte
生成配置
配置
Rte
生成参数,图
3-22
为其配置方法。
图
3-22: Rte
生成配置
(
2
)
Bsw
模块实例配置
在生成
RTE
成功后进行。
Bsw
模块实例大部分由工具自动配置,前提是其存在
Runnable
。为后续编译不出错,在
EcucValueCollection
中无运行函数的模块需要手动配置。
图
3-23: Bsw
模块实例配置
3.8
定点数位域配置
创建
Bfx
模块并完成配置。
3.8.1 Bfx
创建
在
ISOLAR-B
中创建
Bfx
模块。
3.8.2 Bfx
配置
依次进行
Bfx
模块的通用配置和内存定位配置。
图
3-24: Bfx
通用配置
图
3-25: Bfx
内存定位配置
3.9 Ecuc
数值集配置
创建
Ecuc Value Collection
并完成配置。
3.9.1
EcucValueCollection
创建
在
ISOLAR-B
中创建
Ecuc Value Collection
。
3.9.2
EcucValueCollection
配置
依次进行
EcucValueCollection
的配置。
(
1
)模块关联
按照图
3-26
和图
3-27
所示进行模块关联。
图
3-26: EcucValueCollection
配置启动
图
3-27: EcucValueCollection
配置启动
(
2
)
任务分配
依照图
3-28
将各模块的函数拖到对应的
OS
任务中。
图
3-28: EcucValueCollection
任务分配
3.10
AUTOSAR
平台类型配置
创建
AUTOSAR_PlatformTypes
并完成配置。
3.10.1 AR Package
创建
按照图
3-29
创建名为
AUTOSAR_PlatformTypes
的
AR Package
,再按照与之类似的方式为
AUTOSAR_PlatformTypes
创建
1
个子
AR Package
,名称为
ImplementationDataTypes
。
图
3-29: AUTOSAR_PlatformTypes AR Package
创建
3.10.2
数据类型添加
以
uint8
为例,按照图
3-30
、图
3-31
、图
3-32
的步骤添加数据类型。
图
3-30:
数据类型添加启动
图
3-31:
数据类型添加配置
图
3-32:
数据类型参数配置
按照上述步骤依次添加下列数据类型:
boolean
、
float32
、
float64
、
sint16
、
sint32
、
sint64
、
sint8
、
uint16
、
uint32
、
uint64
。
3.11
故障追踪器配置
创建
Det
模块并完成配置。
3.11.1 Det
创建
在
ISOLAR-B
中创建
Det
模块。
3.11.2 Det
配置
依照图
3-33
进行
Det
模块的通用配置。
图
3-33: Det
通用配置
3.12
RTE
生成
在执行
RTE
生成前,须进行抽取、生成
RTA-BSW
、生成
BSW
等操作。
RTE
生成按照图
3-34
和图
3-35
的步骤进行。
“
Additional Commands
”处输入(该过程不再生成
SWC
的内存映射文件):
--strict-unconnected-rport-check=off -err=xml -nts --os-define-osenv=RTAOS40 --exclusive-area-optimization=disable --os-output-param=all
。
图
3-34: RTE
代码生成启动
图
3-35: RTE
代码生成配置
3.13 MCAL
集成
下面介绍
MCAL
的集成步骤。
3.13.1
静态代码集成
MCAL
静态代码的工程路径为“
...\src\Target\TC275\MCAL\modules
”,头文件和源文件分别存放在“
inc
”和“
src
”文件夹下。
MCAL
静态代码从
EB Tresos
的安装路径下拷贝。
3.13.2
配置文件集成
配置文件包括
MCAL
工程文件和单片机各外设模块参数组成的“
.xdm
”文件,其路径为“
...\src\Target\TC275\MCAL\config
”。
配置文件在添加
MCAL
模块时由工具自动生成。
3.14 ECAL
集成
这里的
ECAL
主要包括实现模拟量输入和数字量输入输出信号的抽象,工程路径为“
...\src\IOHWAB
”。
3.15
内存映射集成
内存映射程序文件采用“
xxx_MemMap.h
”的命名规范,主要解决将变量、常量和代码放到指定存储空间的问题。
3.15.1
软件组件内存映射文件
各
SWC
模块的内存映射文件生成方法如图
3-36
所示,通常每个新建软件组件仅生成
1
次即可,之后可删除该命令段。
图
3-36:
软件组件内存映射程序文件生成方法
3.15.2 BSW
模块内存映射文件
各
BSW
模块的内存映射文件生成方法如图
3-37
所示(部分有对应
SWC
的
BSW
模块按照图
3-36
的方法操作),这部分文件通常只生成
1
次,且生成路径不要在程序工程的路径或子路径下,否则容易带来编译错误。
图
3-37: BSW
模块内存映射程序文件生成方法
3.15.3
内存映射程序文件
路径
内存映射文件统一存储在“
...\src\INFRA\memmap
”路径下(其余路径下的内存映射文件须剪切至此),且须在工具生成文件的基础上做相应改动。
3.16
复杂驱动集成
复杂驱动包含板级芯片驱动程序和对复杂传感器和执行器进行操作的软件模块,相关的程序文件均为手写代码,工程路径为“
...\src\CDD
”。
3.1
7
应用层软件集成
按照下面的步骤进行应用层软件集成。
3.17.1
应用层文件拷贝
按照表
3-5
将应用层程序文件拷贝或更新至工程的指定目录。
表
3-5:
应用层程序文件处理
序号
类别
文件(夹)名
文件拷贝位置
1
A2L
XXX
.a2l
(一个或多个)
...
\tools\A2LGenTool\ASAP\Adr_Files\a2l
2
Arxml
XXX
.arxml
(一个或多个)
...\src\ASW\VcuApp_SWC\arxml
3
文件夹
lib
(库文件)
...\src\ASW\VcuApp_SWC
4
C
XXX
.c
(一个或多个)
...\src\ASW\VcuApp_SWC\src
5
H
XXX
.h
(一个或多个)
...\src\ASW\VcuApp_SWC\src
3.17.2 ARXML
文件导入
如果是首次操作,须按照图
3-38
所示进行,再执行刷新操作;后续更新只需要在完成文件拷贝后直接刷新工程即可。
图
3-38:
应用层
ARXML
导入
3.17.3 SWC
添加
将应用层的
SWC
分别添加到部件和
ECU
中,抽取。
3.17.4
相关模块设计
在程序中调用应用层软件的初始化和执行函数。
3.18
其它模块设计与集成
以上完成了
VCU
软件的工程创建和必备模块集成的基本工作,表
3-6
列出了车载
ECU
软件的一些其它的常用模块,这些将在后续的软文中逐一探讨。
表
3-6:
车载
ECU
软件常用模块
序号
模块名称
功用
1
BOOTLOADER
实现
ECU
程序的更新
2
XCP
用于参数标定
3
UDS
用于故障诊断
4
NvM
用于参数存储
5
核间通信
适用于多核微处理器的主控芯片
4
补充说明
下面对上一章的操作过程进行几点说明。
(
1
)本文的内容倾向于“工程实践”,仅讲述了“怎么做”而非“为什么这么做”,其中的概念和原理请参考
AUTOSAR
规范的相关章节。
(
2
)前文对软件集成的步骤以模块为单位逐一说明,但在实际操作过程中可能出现“前个模块配置须依赖于后续模块设计到某个步骤”的情况,故在软件设计过程中不必拘泥于文中的次序。
(
3
)在进行“从无到有创建
AUTOSAR
工程”的过程中得到了团队内外很多同行的指点和帮助,从尊重大家工作成果和遵守公司保密性要求的角度考虑,部分重要的技术细节不宜公开发表(工具链开发涉及到的内容很多,我在此领域工作
3
年已经编写了数千页的工作文档,确实也很难通过一篇文章讲清楚整个过程),如果读者在开发过程中遇到问题,欢迎私下里探讨。
—END—
添加下方信加入汽专业交流群
(仅限专业人士,添加备注单位+姓名)
登录阅读全文
AUTOSAR
工具链
免责声明:
该内容由专栏作者授权发布或作者转载,目的在于传递更多信息,并不代表本网赞同其观点,本站亦不保证或承诺内容真实性等。若内容或图片侵犯您的权益,请及时联系本站删除。侵权投诉联系:
nick.zong@aspencore.com
!
汽车电子与软件
主要介绍汽车电子软件设计相关内容,每天分享一篇技术文章!
进入专栏
评论
(0)
请登录后参与评论回复
登录
芯语
帖子
文库
下载
博文
首款鸿蒙PC!曝华为笔记本新品售价过万
硬件世界
2025-04-17
519浏览
NVIDIA新驱动修复41个Bug!RTX50花式黑屏、RTX40没人管
硬件世界
2025-04-18
487浏览
AMD显卡卖爆!RX9070XT欧洲销量是RTX5080的10倍还多
硬件世界
2025-04-17
276浏览
消息称苹果开始在巴西组装iPhone16e手机
52RD
2025-04-18
249浏览
TCL华星携APEX臻图惊喜亮相TouchTaiwan,推动电子纸产业可持续发展
WitDisplay
2025-04-18
233浏览
仰望U7水平对置电动化发动机:一个字“牛”!
电动车千人会
2025-04-17
228浏览
Wolfspeed:碳化硅技术引领新一代伺服电机驱动设计
第三代半导体风向
2025-04-17
217浏览
H20被禁,黄仁勋紧急访华!
芯极速
2025-04-18
215浏览
浅谈当前半导体芯片发展趋势---个人心得体会
RichardLXQ
2025-04-12
818浏览
聚焦 3 月:世界通信大会、嵌入式展及慕尼黑上海光博会...
益莱储
2025-04-01
89浏览
怎么判断MOS管是否处于开关饱和状态?有哪些简单的办法...
QWE4562009
2025-04-07
841浏览
【2025面包板社区内容狂欢节】发文、回帖赢25万E币!
面包板社区管理员
2025-04-15
410浏览
高明的领导都看重组织建设和人才的培养,“组织行为学...
金航标萨科微谢S
2025-04-10
69浏览
单节锂电3.7V升压9V-12V电源有哪些升压IC推荐?SL4011耐压2.7V-12V
森利威尔
2025-04-18
5浏览
雷卯收集虚拟现实VR开发板
上海雷卯电子
2025-04-01
42浏览
供电12V,灯珠2835的,规格书如附件,如果要做成5W的总功...
QWE4562009
2025-04-10
652浏览
cadence中如何测试鉴相器的输出电压和相差的关系
Orange1
2025-04-02
899浏览
金航标和萨科微在2024年继续保持百分之八十的复合型增长...
17603041312
2025-04-02
59浏览
国产首款量产型七位半万用表!青岛汉泰开启国产高精度...
用户1743487902085
2025-04-01
12浏览
模拟《安妮宝贝》体 写的一段小故事
丙丁先生
2025-04-10
129浏览
燃料电池模拟器简介
简单qqq
2025-04-17
69浏览
WeActStudio的STM32G431CoreBoard开发资料
所需E币: 0
2025-04-18 07:38
大小: 67.61MB
上传者:
汕
C#+WPF+Opencv模块化开发视觉对位运动控制系统
所需E币: 0
2025-04-07 10:35
大小: 2.71KB
上传者:
huangyasir1990
ASL6328 HDMI2.0 Retimer中继器ic设计说明书
所需E币: 0
2025-03-28 10:09
大小: 1.17MB
上传者:
QQ1540182856
如何使用英飞凌IGBT7设计高性能伺服驱动器
所需E币: 1
2025-04-10 09:03
大小: 2.51MB
上传者:
Eronatos
传感器与信号处理-图书
所需E币: 1
2025-03-23 16:31
大小: 14.55MB
上传者:
用户1742717142918
stlink 的hex固件烧录安装工具4.6
所需E币: 0
2025-03-24 14:12
大小: 25.38MB
上传者:
悠悠海
IGBT并联使用要点(来源于onsemi)
所需E币: 0
2025-03-27 08:56
大小: 3.55MB
上传者:
buffaloyanlu
电源工程师技术培训-初级
所需E币: 2
2025-04-03 13:06
大小: 8.01MB
上传者:
无极考拉
可以兼容替代CS4272!NX9020中文规格书/参数,114 dB CODEC
所需E币: 0
2025-04-16 10:26
大小: 374.78KB
上传者:
纳祥科技王工
纳祥科NX9018,HIFI级192KHZ多位DAC,兼容替代CS4398,ESS9018
所需E币: 0
2025-03-24 16:59
大小: 1.42MB
上传者:
纳祥科技王工
英飞凌双通道音频功率驱动芯片
所需E币: 1
2025-03-27 08:51
大小: 2.22MB
上传者:
buffaloyanlu
FCO-3C-UP | 3.2*2.5mm | 1.2V低功耗SMD晶体振荡器
所需E币: 0
2025-04-11 22:15
大小: 5.18MB
上传者:
FCom富士晶振
车规级功率半导体技术现状、挑战与发展趋势
所需E币: 1
2025-04-10 09:05
大小: 2.45MB
上传者:
Eronatos
全球6G大会 | 紫光展锐用“芯”推动空天地一体创新纪元
近日,全球6G技术与产业生态大会(简称“全球6G技术大会”)在南京召开。紫光展锐应邀出席“空天地一体化与数字低空”平行论坛,并从6G通信、感知、定位等多方面分享了紫光展锐在6G前沿科技领域的创新理念及在空天地一体化技术方面的研发探索情况。全球6G技术大会是6G领域覆盖广泛、内容全面的国际会议。今年大会以“共筑创新 同享未来”为主题,聚焦6G愿景与关键技术、安全可信、绿色可持续发展等前沿主题,汇聚国内外24家企业、百余名国际知名高校与科研代表共同商讨如何推动全行业6G标准共识形成。6G迈入关键期,
紫光展锐
2025-04-17 18:55
129浏览
无人机对抗电磁环境效应仿真系统全面解析
无人机电磁环境效应仿真系统:深度剖析 一、系统概述 无人机电磁环境效应仿真系统,专为无人机在复杂电磁环境下的性能评估及抗干扰能力训练打造。借助高精度仿真技术,它模拟无人机在各类电磁干扰场景中的运行状态,为研发、测试与训练工作提供有力支撑。 应用案例 目前,已有多个无人机电磁环境效应仿真系统在实际应用中取得了显著成效。例如,北京华盛恒辉和北京五木恒润无人机电磁环境效应仿真系统。这些成功案例为无人机电磁环境效应仿真系统的推广和应用提供了有力支持。 二、系统功能
华盛恒辉l58ll334744
2025-04-17 15:51
64浏览
Matter如何终结智能家居生态割据,重构你的居住体验?
现阶段,Zigbee、Z-Wave、Thread、Wi-Fi与蓝牙等多种通信协议在智能家居行业中已得到广泛应用,但协议间互不兼容的通信问题仍在凸显。由于各协议自成体系、彼此割据,智能家居市场被迫催生出大量桥接器、集线器及兼容性软件以在不同生态的设备间构建通信桥梁,而这种现象不仅增加了智能家居厂商的研发成本与时间投入,还严重削减了终端用户的使用体验。为应对智能家居的生态割裂现象,家居厂商需为不同通信协议重复开发适配方案,而消费者则需面对设备入网流程繁琐、跨品牌功能阉割及兼容隐患等现实困境。在此背景
华普微HOPERF
2025-04-17 17:53
49浏览
无人机电磁兼容模拟训练系统软件全面解析
无人机电磁兼容模拟训练系统软件:全方位剖析 一、系统概述 北京华盛恒辉无人机电磁兼容模拟训练系统软件,专为满足无人机于复杂电磁环境下的运行需求而打造,是一款专业训练工具。其核心功能是模拟无人机在电磁干扰(EMI)与电磁敏感度(EMS)环境里的运行状况,助力用户评估无人机电磁兼容性能,增强其在复杂电磁场景中的适应水平。 应用案例 目前,已有多个无人机电磁兼容模拟训练系统在实际应用中取得了显著成效。例如,北京华盛恒辉和北京五木恒润无人机电磁兼容模拟训练系统。这些成功案例为
华盛恒辉l58ll334744
2025-04-17 14:52
33浏览
无人机电磁兼容模拟训练系统软件
北京华盛恒辉无人机电磁兼容模拟训练系统软件是专门用于模拟与分析无人机在复杂电磁环境中电磁兼容性(EMC)表现的软件工具。借助仿真技术,它能帮助用户评估无人机在电磁干扰下的性能,优化电磁兼容设计,保障无人机在复杂电磁环境中稳定运行。 应用案例 目前,已有多个无人机电磁兼容模拟训练系统在实际应用中取得了显著成效。例如,北京华盛恒辉和北京五木恒润无人机电磁兼容模拟训练系统。这些成功案例为无人机电磁兼容模拟训练系统的推广和应用提供了有力支持。 系统功能 电磁环境建模:支持三维
华盛恒辉l58ll334744
2025-04-17 15:10
52浏览
优思学院|置信区间为什么用的是标准误而非标准差?
置信区间反映的是“样本均值”这个统计量的不确定性,因此使用的是标准误(standard error),而不是直接用样本标准差(standard deviation)。标准误体现的是均值的波动程度,而样本标准差体现的是个体数据的波动程度,两者并非一回事,就如下图所显示的一样。下面优思学院会一步一步解释清楚:一、标准差和标准误,究竟差在哪?很多同学对“标准差”和“标准误”这两个概念傻傻分不清楚,但其实差别明显:标准差(Standard Deviation,σ或s):是衡量单个数据点相对于平均值波动的
优思学院
2025-04-17 13:59
24浏览
Electronica上海展快报 | Samtec Demo总动员!
【摘要/前言】4月春日花正好,Electronica就在浪漫春日里,盛大启幕。2025年4月15-17日,慕尼黑上海电子展于上海新国际博览中心成功举办。伴随着AI、新能源汽车、半导体的热潮,今年的Electronica盛况空前。请跟随Samtec的视角,感受精彩时刻!【 Samtec展台:老虎的朋友圈技术派对】借天时、占地利、聚人和,Samtec 展台人气爆棚!每年展会与大家相聚,总能收获温暖与动力~Samtec展台位于W3展馆716展位,新老朋友相聚于此,俨然一场线下技术派对!前沿D
电子资讯报
2025-04-17 11:38
40浏览
芯资讯|基于WTVXXX-32N语音芯片的智能门锁后板一体化方案介绍
一、行业背景与需求智能门锁作为智能家居的核心入口,正从单一安防工具向多场景交互终端演进。随着消费者对便捷性、安全性需求的提升,行业竞争已从基础功能转向成本优化与智能化整合。传统门锁后板方案依赖多颗独立芯片(如MCU、电机驱动、通信模块、语音模块等),导致硬件复杂、功耗高、开发周期长,且成本压力显著。如何通过高集成度方案降低成本、提升功能扩展性,成为厂商破局关键。WTVXXX-32N语音芯片通过“单芯片多任务”设计,将语音播报、电机驱动、通信协议解析、传感器检测等功能整合于一体,为智能门锁后板提供
广州唯创电子
2025-04-18 09:04
119浏览
无人机蜂群电磁作战仿真系统全面解析
无人机蜂群电磁作战仿真系统全解析 一、系统概述 无人机蜂群电磁作战仿真系统是专业的仿真平台,用于模拟无人机蜂群在复杂电磁环境中的作战行为与性能。它构建虚拟电磁环境,模拟无人机蜂群执行任务时可能遇到的电磁干扰与攻击,评估作战效能和抗干扰能力,为其设计、优化及实战应用提供科学依据。 应用案例 目前,已有多个无人机蜂群电磁作战仿真系统在实际应用中取得了显著成效。例如,北京华盛恒辉和北京五木恒润无人机蜂群电磁作战仿真系统。这些成功案例为无人机蜂群电磁作战仿真系统的推广和应用提
华盛恒辉l58ll334744
2025-04-17 16:29
70浏览
【原创奖励】ESP开发之ubuntu环境搭建
1. 在Ubuntu官网下载Ubuntu server 20.04版本https://releases.ubuntu.com/20.04.6/2. 在vmware下安装Ubuntu3. 改Ubuntu静态IP$ sudo vi /etc/netplan/00-installer-config.yaml# This is the network config written by 'subiquity'network: renderer: networkd&nbs
二月半
2025-04-17 16:27
67浏览
探究一下ADAS时空融合数据采集问题
自动驾驶技术的飞速发展,正在重新定义未来出行的边界。从感知到决策,从规划到控制,每一个环节都离不开海量、精准的高质量数据支撑。然而,随着传感器数量的增加和数据规模的指数级增长,行业正面临一系列挑战:多源传感器数据的时间同步难题、复杂数据格式的适配、测量技术的灵活性不足、设备集成周期冗长等,这些问题正成为自动驾驶研发与测试的“隐形瓶颈”。基于技术积累与行业洞察,本文分享一套创新的ADAS时空融合数据采集方案。通过硬件与软件的深度协同优化,能够很好地解决数据采集中的核心痛点,还为自动驾驶研发提供了高
康谋
2025-04-17 09:54
45浏览
芯资讯|基于WT2605C蓝牙语音芯片的电动车中控智能化升级方案
一、行业背景与需求随着智能化技术的快速发展和用户对便捷性需求的提升,电动车行业正经历从传统机械控制向智能交互的转型。传统电动车依赖物理钥匙、遥控器和独立防盗装置,存在操作繁琐、功能单一、交互性差等问题。用户期待通过手机等智能终端实现远程控制、实时数据监控及个性化交互体验。为此,将蓝牙语音芯片集成至电动车中控系统,成为推动智能化升级的关键技术路径。二、方案概述本方案通过在电动车中控系统中集成WT2605C蓝牙语音芯片,构建一套低成本、高兼容性的智能交互平台,实现以下核心功能:手机互联控制:支持蓝牙
广州唯创电子
2025-04-18 08:33
99浏览
无人机蜂群电磁作战仿真系统软件
无人机蜂群电磁作战仿真系统软件,是专门用于模拟、验证无人机蜂群在电磁作战环境中协同、干扰、通信以及对抗等能力的工具。下面从功能需求、技术架构、典型功能模块、发展趋势及应用场景等方面展开介绍: 应用案例 目前,已有多个无人机蜂群电磁作战仿真系统在实际应用中取得了显著成效。例如,北京华盛恒辉和北京五木恒润无人机蜂群电磁作战仿真系统。这些成功案例为无人机蜂群电磁作战仿真系统的推广和应用提供了有力支持。 功能需求 电磁环境建模:模拟构建复杂多样的电磁环境,涵盖各类电磁干扰源与
华盛恒辉l58ll334744
2025-04-17 16:49
64浏览
汽车电子与软件
主要介绍汽车电子软件设计相关内容,每天分享一篇技术文章!
文章:1931篇
粉丝:196人
关注
私信
最近文章
免费注册|2025亚马逊云科技中国汽车行业峰会
理想星环OS技术架构详解
职位内推|同润智能科技有限公司(上海、芜湖)
车道偏离保持系统(LKA:LaneKeepingAssist)功能介绍
活动预告|AWSAI科技闭门沙龙
热门文章
广告
推荐
汽车用卸负载电阻低价方案
TOLG 技术采用超紧凑的海鸥翼式引脚设计
汽车智能照明背后的“黑科技”传感器,你知道吗?
EPC专家实战拆解:电机能效优化技巧
在线研讨会
迈来芯新一代经济型热成像技术:赋能电力电子过热保护与智能应用温度监控
ADI 应用于电池管理系统 (BMS) 的电芯监测解决方案
利用氮化镓技术打造高效电机驱动——人形机器人、无人机与电动汽车应用
ADMT4000重新定义多圈编码器设计
E聘热招职位
资料
文库
帖子
博文
1
AD、DA转换器接口技术与实用线路-杨振江
2
传感器与信号处理-图书
3
自动控制原理++上册,黄家英,第二版
4
现代传感器集成电路:通用传感器电路
5
多传感器信息融合及应用
6
IGBT图解
7
车规级功率半导体技术现状、挑战与发展趋势
8
头文件类型定义
9
2025年感知技术十大趋势深度分析报告
10
[完结14章]Vue3.5+Electron+大模型 跨平台AI桌面聊天应用实战
1
【2025面包板社区内容狂欢节】发文、回帖赢25万E币!
2
已知并联电阻总阻值,算出23456个......并联电阻的阻值,比...
3
HMD3075国产首款量产型七位半万用表!青岛汉泰开启国产高...
4
差分晶振的输出方式有哪几种呢
5
IU5209E升压充电管理芯片
6
cadence中如何测试鉴相器的输出电压和相差的关系
7
拆解:DMA方式WM803开发板+ST7735驱动显示TTL例程解析
8
有些电源是需要挂着负载才有输出 这种电路原理是怎么做...
1
芯资讯|基于WTVXXX-32N语音芯片的智能门锁后板一体化方案介绍
2
芯资讯|基于WT2605C蓝牙语音芯片的电动车中控智能化升级方案
3
全球6G大会 | 紫光展锐用“芯”推动空天地一体创新纪元
4
Matter如何终结智能家居生态割据,重构你的居住体验?
5
无人机蜂群电磁作战仿真系统软件
6
无人机蜂群电磁作战仿真系统全面解析
7
【原创奖励】ESP开发之ubuntu环境搭建
8
无人机对抗电磁环境效应仿真系统全面解析
1
单片机基础:GPIO、定时器、串行通信、中断
2
三合一“防反接、防过压、缓启动电路”
3
12V典型开关电源方案(有哪些品牌选择)
4
PCB叠层阻抗设计(详细)
5
什么是无功补偿的共补、分补、混补?
6
一文说清楚PLC、运动控制卡、运动控制器
7
4.2V单节锂电池充电电路、USB与锂电池切换电路
8
DN、De、Φ分别表示什么?有什么区别?一文搞懂!
9
比亚迪纯电动汽车热泵空调技术详解
10
电工请记下这张图,非常实用(赶快收藏)
分享到
微信扫一扫,立即分享
评论
0
点赞
0
本网页已闲置超过10分钟,按键盘任意键或点击空白处,即可回到网页
X
最新资讯
终于还是下手了!美国宣布将对中国船舶征收港口费
中国“破晓(PoX)”皮秒闪存器件问世,问鼎全球最快
用一个非常简单的MultiSim SPICE模型,讲清楚时域反射
三星电子4nm HBM4芯片初期良率达40%,但仍存量产挑战
AI 眼镜爆发前的路径分岔,选择比努力更重要
我要评论
0
0
分享到微信
点击右上角,分享到朋友圈
我知道啦
请使用浏览器分享功能
我知道啦
×
提示!
您尚未开通专栏,立即申请专栏入驻



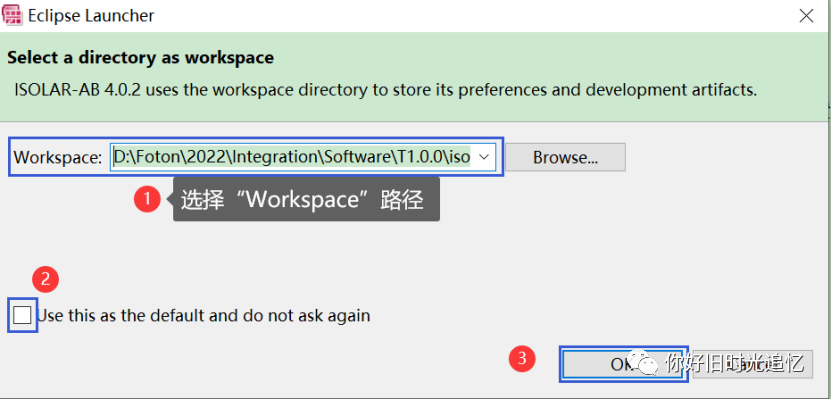
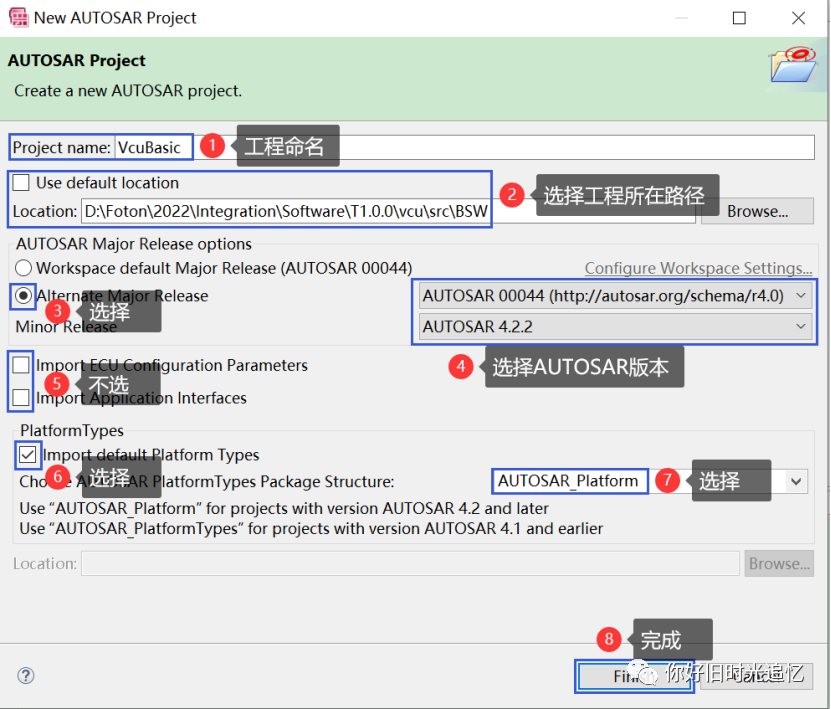

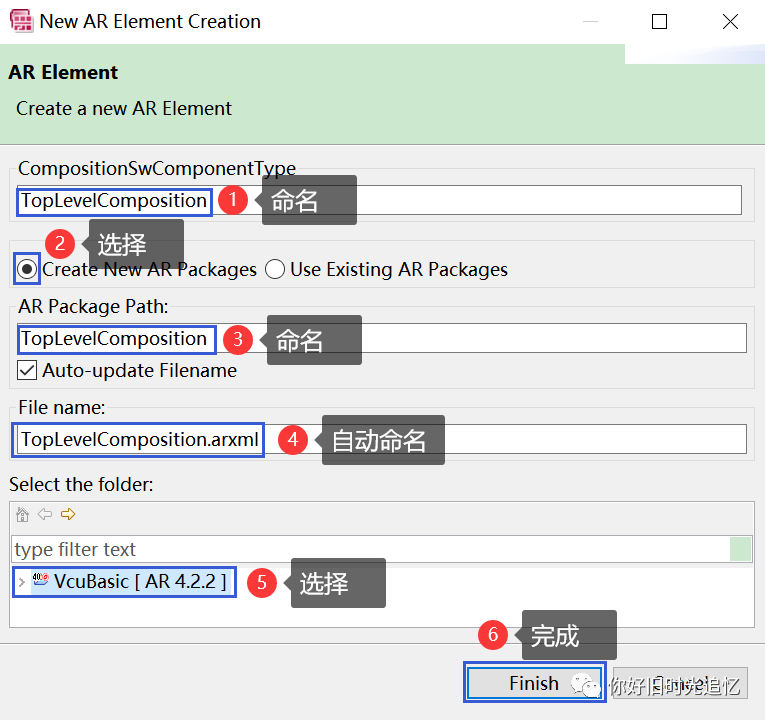
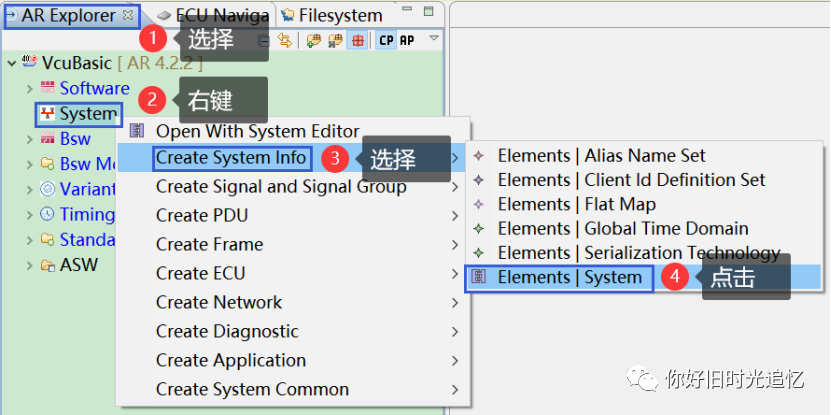
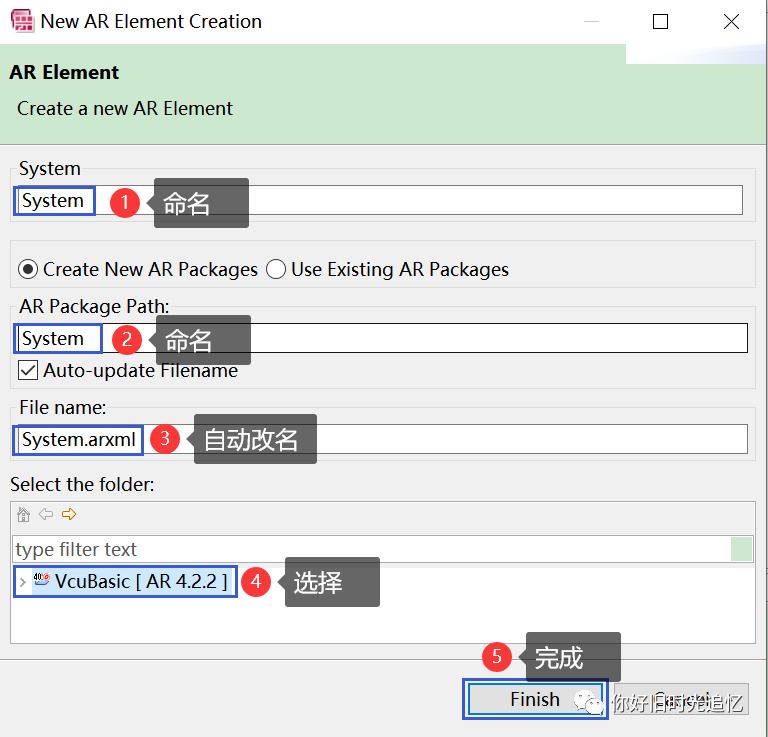


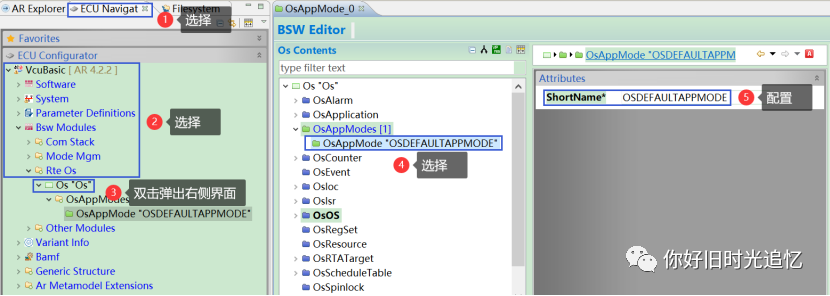
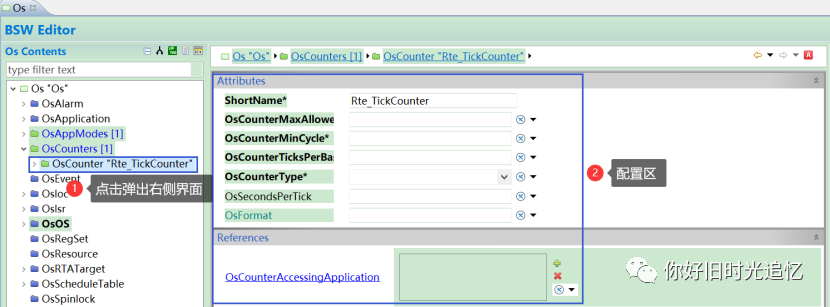
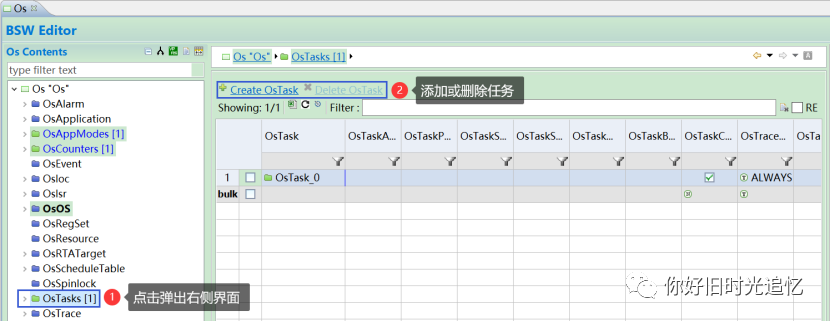
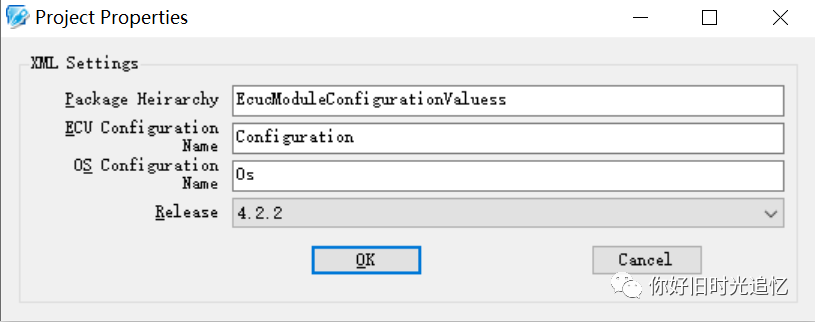
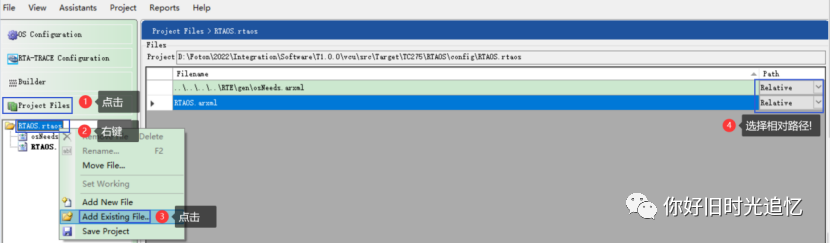 图3-13: OS工程文件加载
图3-13: OS工程文件加载


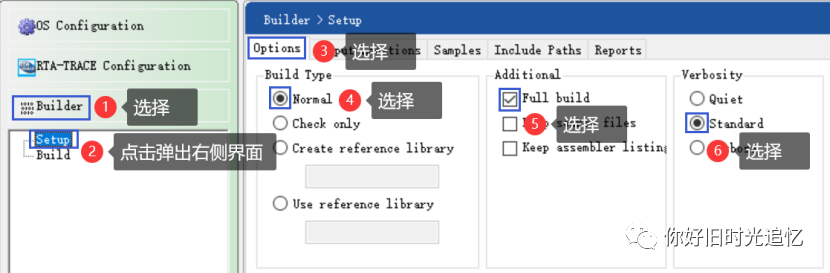
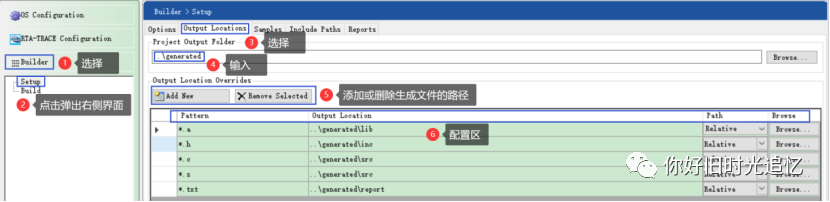
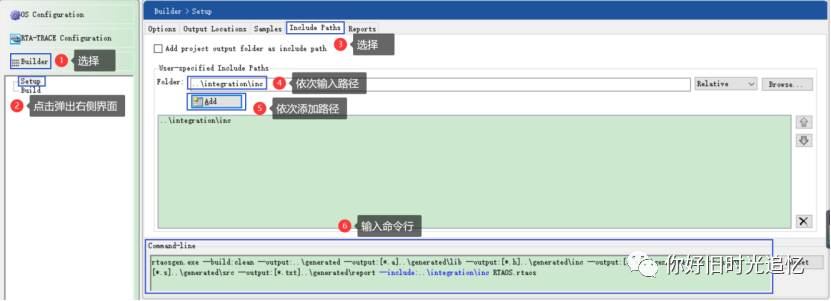
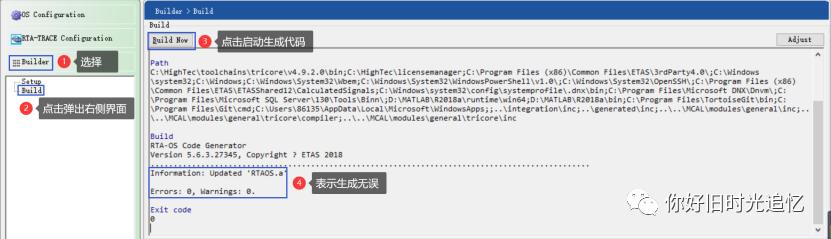
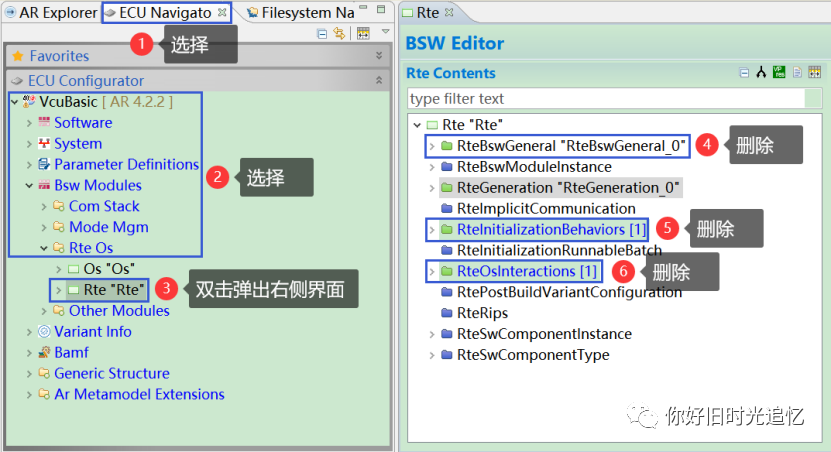
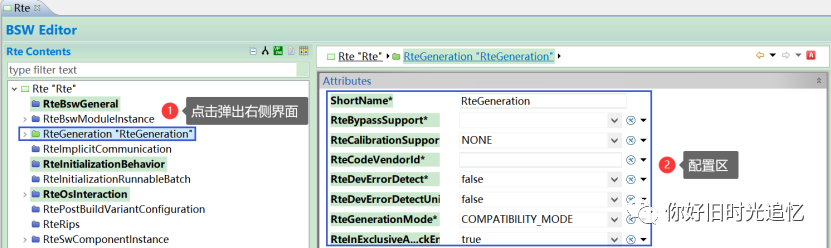
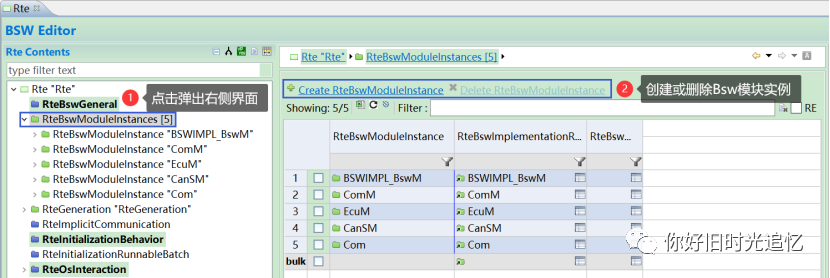
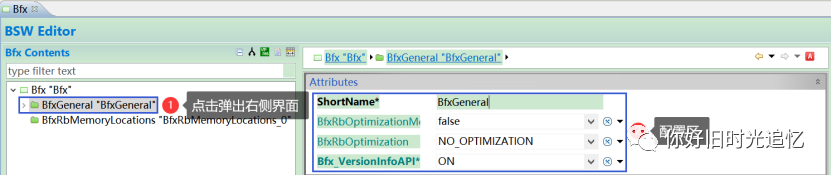
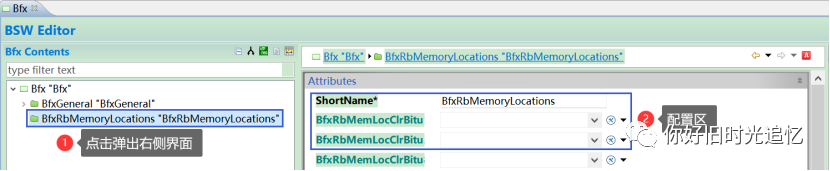
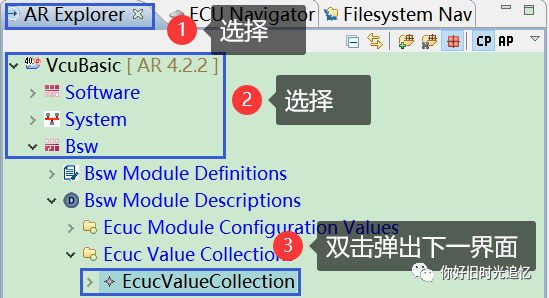
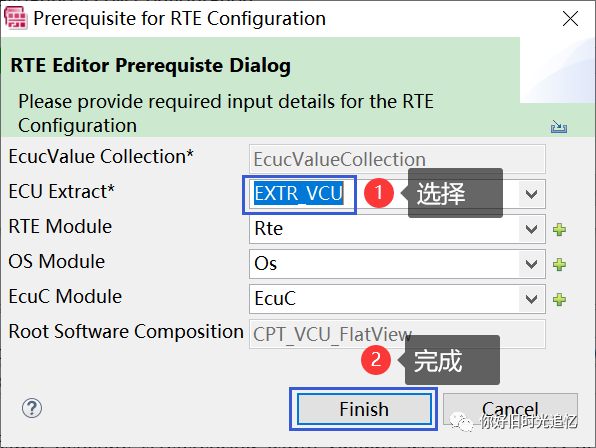
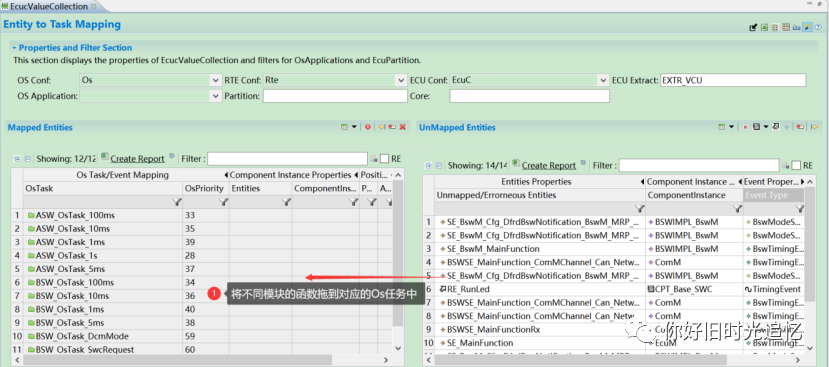
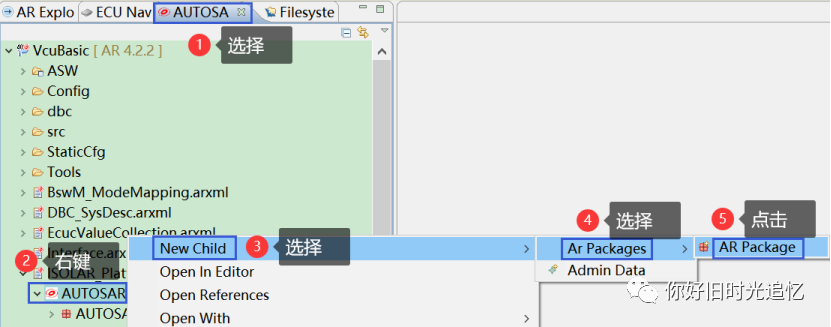
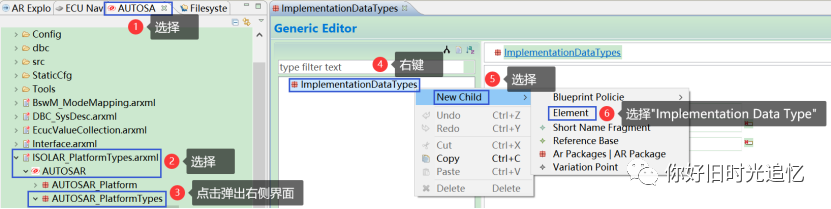 图3-30: 数据类型添加启动
图3-30: 数据类型添加启动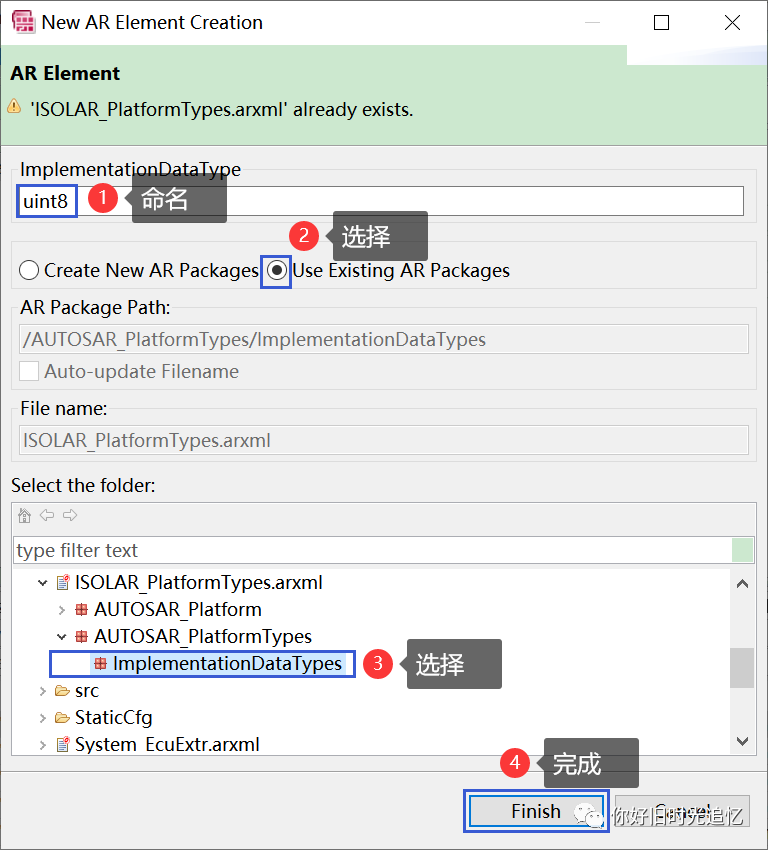 图3-31: 数据类型添加配置
图3-31: 数据类型添加配置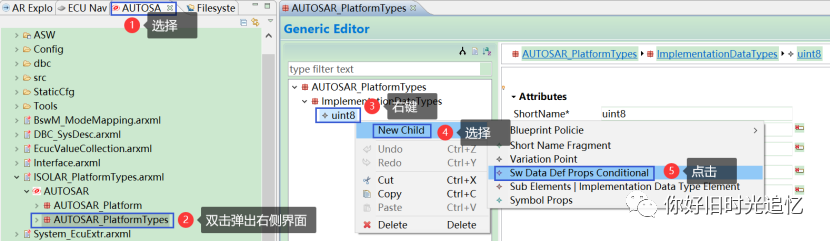 图3-32: 数据类型参数配置
图3-32: 数据类型参数配置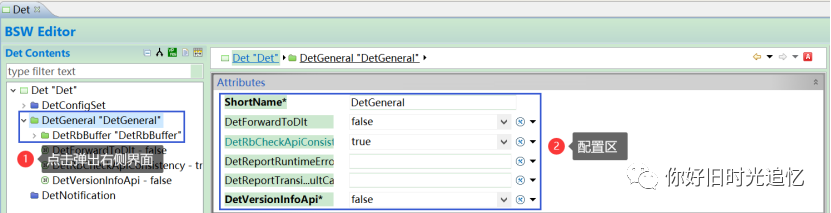 图3-33: Det通用配置
图3-33: Det通用配置 图3-34: RTE代码生成启动
图3-34: RTE代码生成启动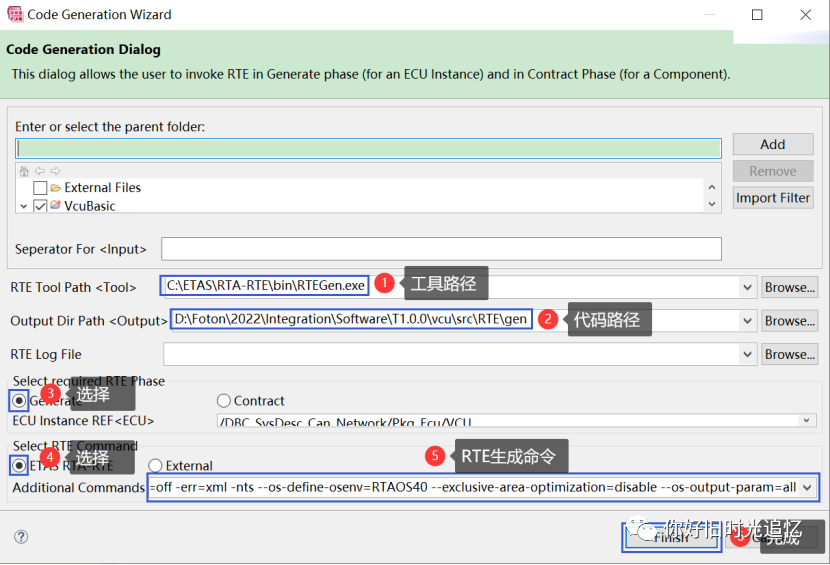 图3-35: RTE代码生成配置
图3-35: RTE代码生成配置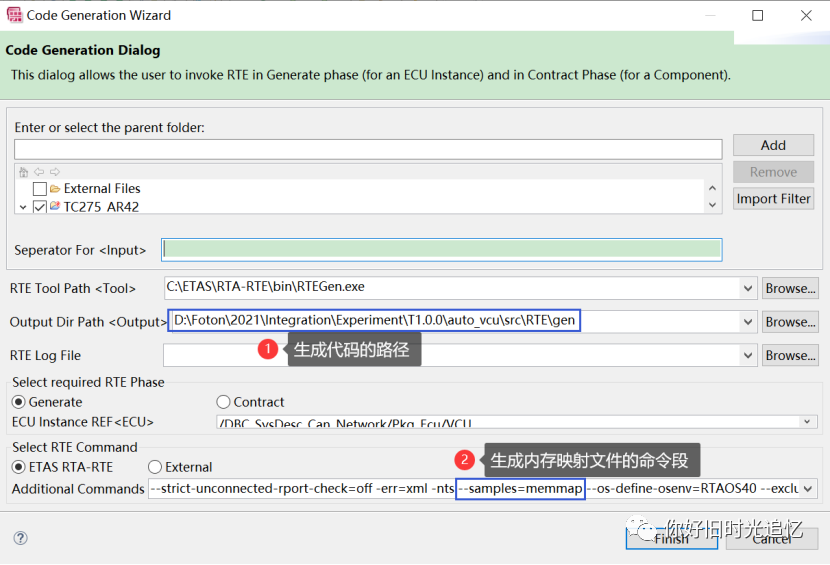 图3-36: 软件组件内存映射程序文件生成方法
图3-36: 软件组件内存映射程序文件生成方法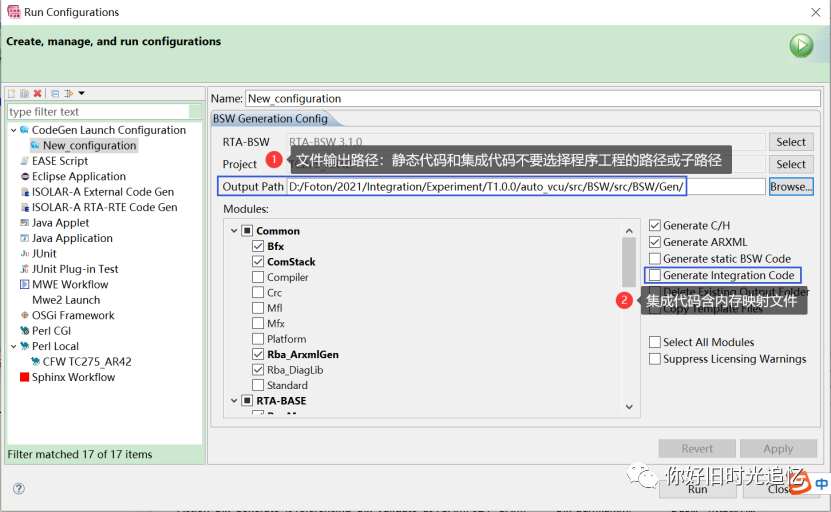 图3-37: BSW模块内存映射程序文件生成方法
图3-37: BSW模块内存映射程序文件生成方法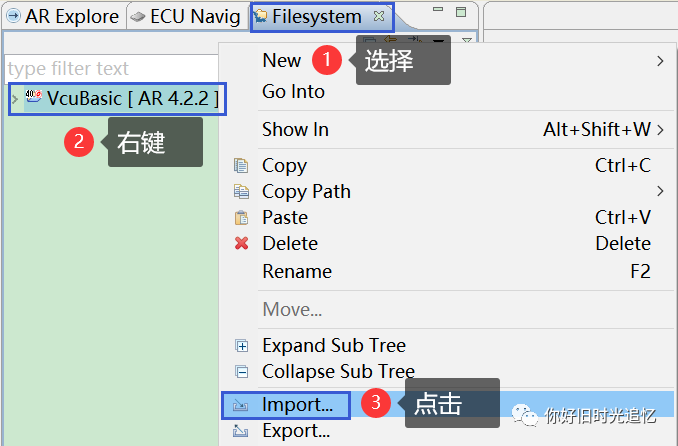 图3-38: 应用层ARXML导入
图3-38: 应用层ARXML导入
